במהלך השכלתו שיחק המחבר משחקים עם תומך מד תאוצה בטלפון שלו. הוא מאוד אהב לנהוג במכונית בטלפון פשוט על ידי הטיה ואז התחיל לחלום ליצור מכונית עם אותה שליטה בחיים האמיתיים. עכשיו יש ארדואינו לאחר שרכש כישורי תכנות, הגיע הזמן ליצור מכונה מנוהלת באנדרואיד, הוא קרא לה הרקולס.
את השם הזה היא קיבלה בגלל המומנט העצום והמהירות הגבוהה. דוגמנית ניתן לשלוט באמצעות טלפון אנדרואיד באמצעות Bluetooth. כל טלפון עם מערכת הפעלה זו מתאים לשליטה, המחבר אינו מגביל שלט רחוק אחד. כמו כן, השימוש בטלפון חסך כסף, מכיוון שלא הייתי צריך לבזבז כסף על יצירת שלט רחוק.
חומרים וכלים:
- ארדואינו אונו
- משדר Bluetooth
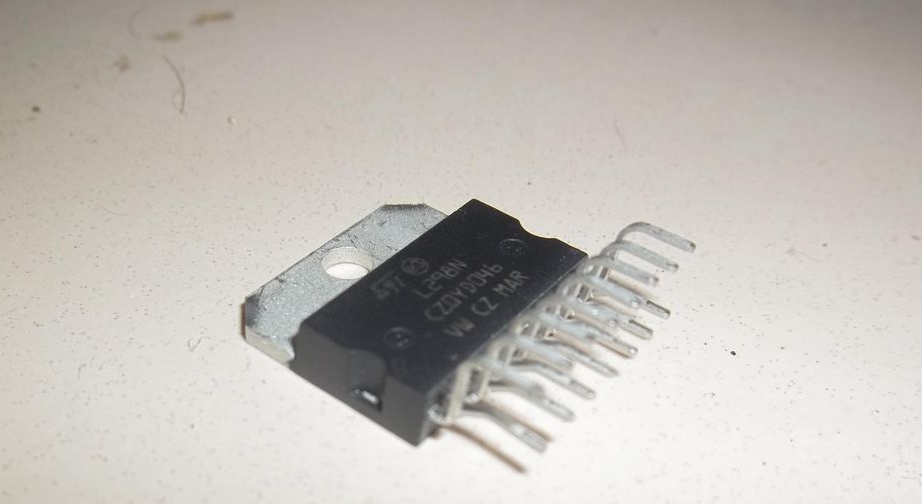
- נהג מנוע כפול (עם גשר L298 H)
- מנועים עם הילוכים 4 יח '(כוח נבחר בהתאם ליישום המכונה)
- גלגלים 4 יח '
- סוללה 1Ah SLA 12V
- בסיס לרכיבים (שלדה)
- קרש לחם
- קופסאות לדיור 4 יח '
- מתג SPST
- חיבור חוטים לארדואינו
- חוטי הלחמה
- אגוזים וברגים בגודל קטן
- נגד 10 kOhm 1 pc
- נגד 20 kOhm 1 pc
- טלפון אנדרואיד
- הלחמה
- הלחמה
- משחת הלחמה
- תרגיל





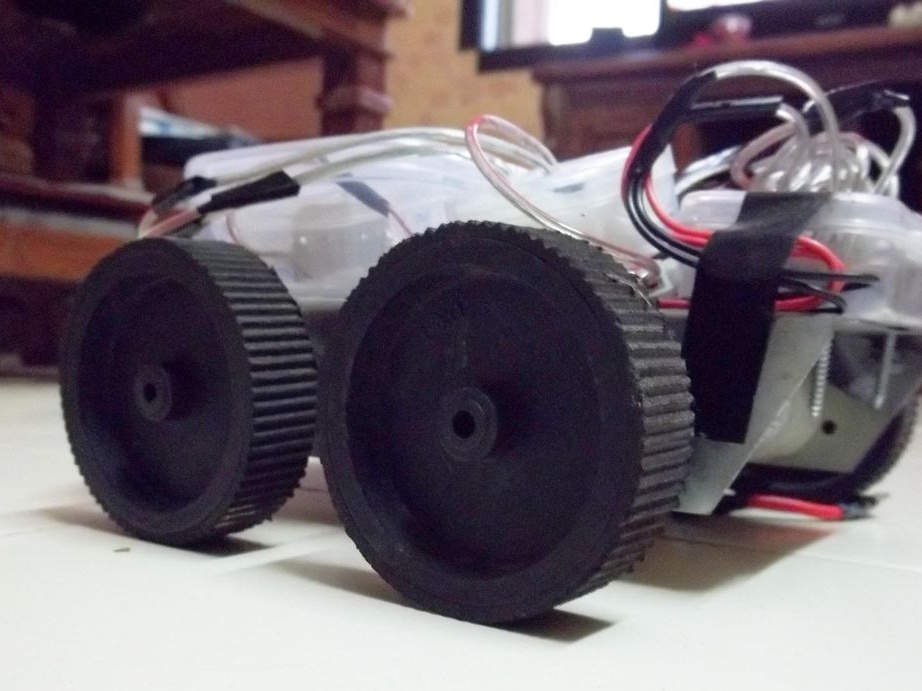
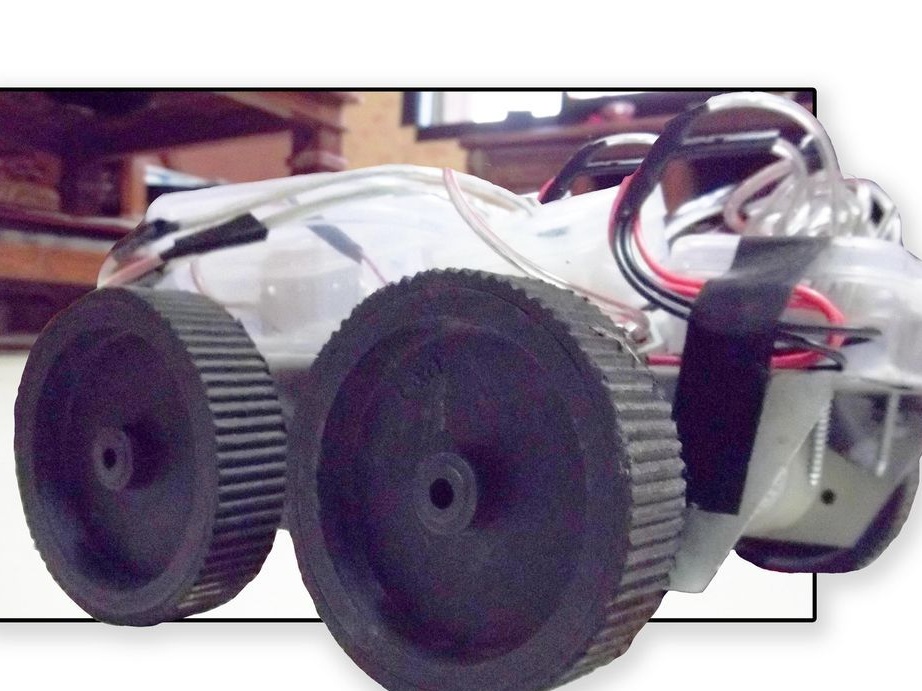
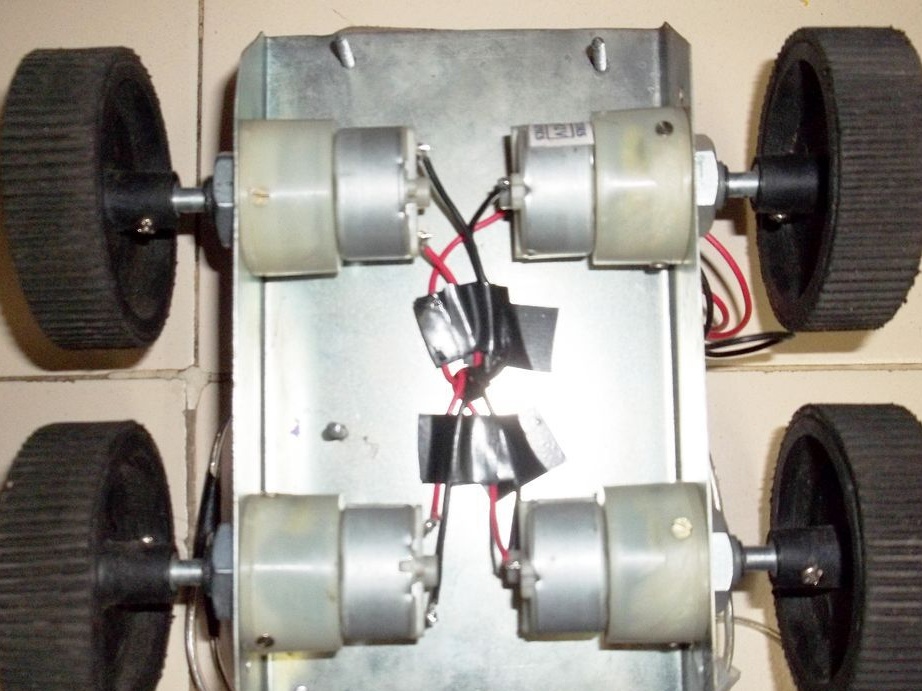
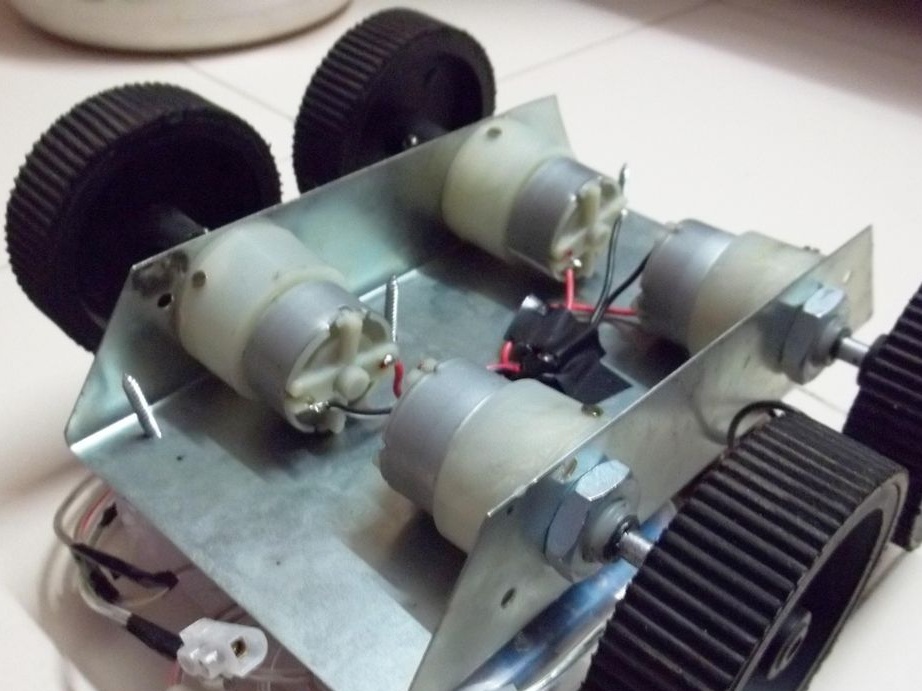
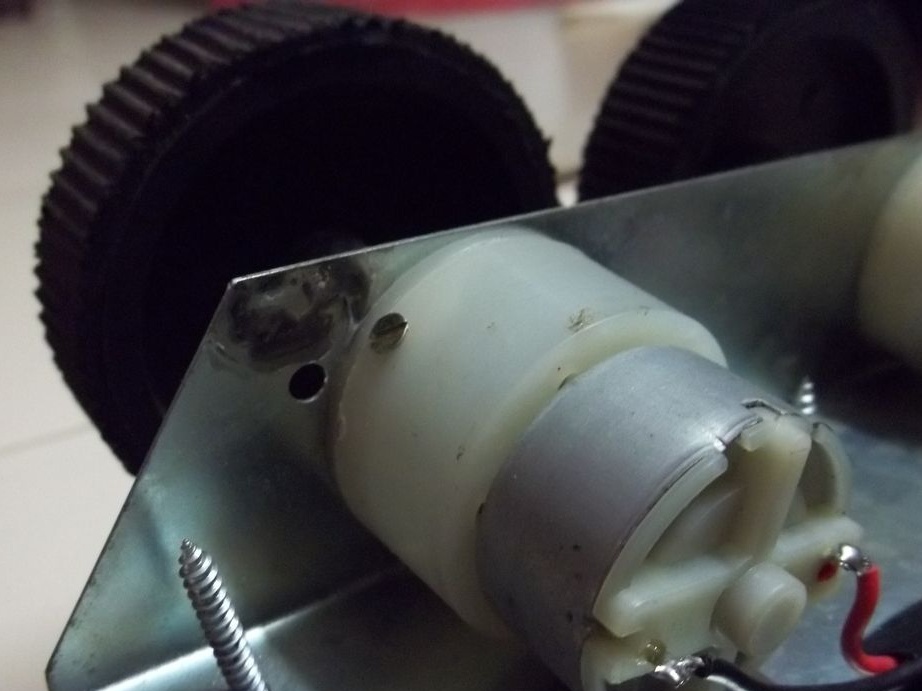
צעד ראשון. גלגלים ושלדה.
ברגי המנוע הקלו על התקנתם על השלדה באמצעות אגוזים. הגלגלים מותקנים עד לפיר המנוע. שני מנועים ימניים מופעלים במקביל זה לזה, כמו גם שני מנועים שמאליים. כיצד נראית השלדה לאחר התקנת ארבעה גלגלים ומנועים ניתן לראות בתמונה למטה.
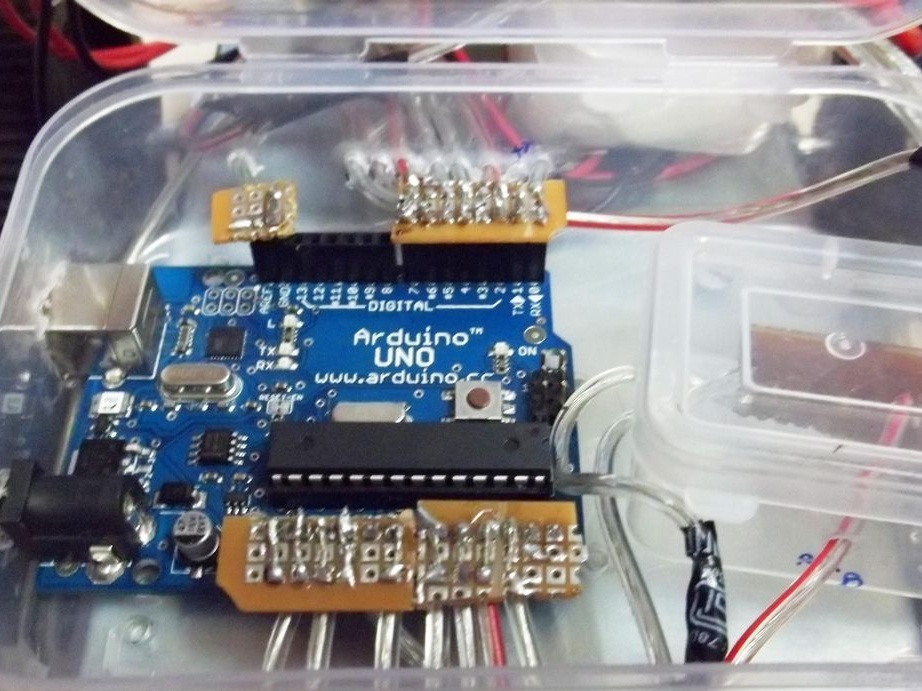
שלב שני דיור לארדואינו.
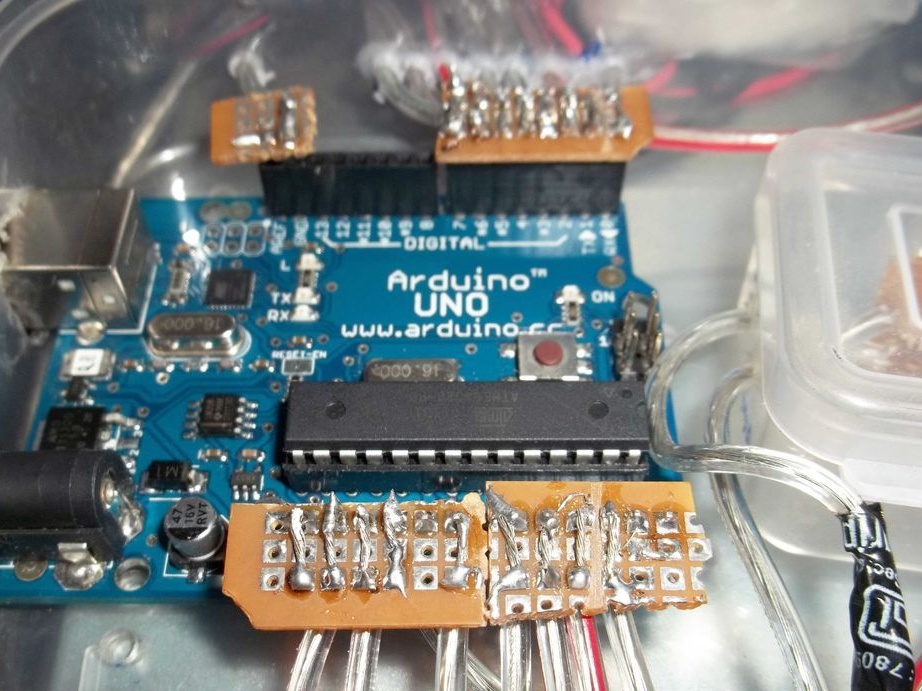
תרשים המקרים של הארדואינו מחולק למספר חלקים. פיתרון עיצובי מודולרי כזה יסייע בעתיד לתמוך במעגל, או לבטל תקלה אפשרית. אם אחד הרכיבים נשבר או שורף, אז אפשר להחליף אותו במהירות, ומבלי לשבור את העיצוב. התיבה עבור Arduino נוצרה כך:
- ארבעה חלקים נחתכו מהקרטון, שניים מהם עם חורים בגודל 8x3, שני החלקים השני 6x3.
- סיכות BLS הודחמו לכל לוח בצד הארוך.
- כל סיכה בלוח הגישה הוצתה בנוסף עם חוטים באורך 10 ס"מ. הדבר נעשה כדי שהחוטים לא יירדו מהארדואינו, מכיוון שכעת החל העומס להתפזר באופן שווה.
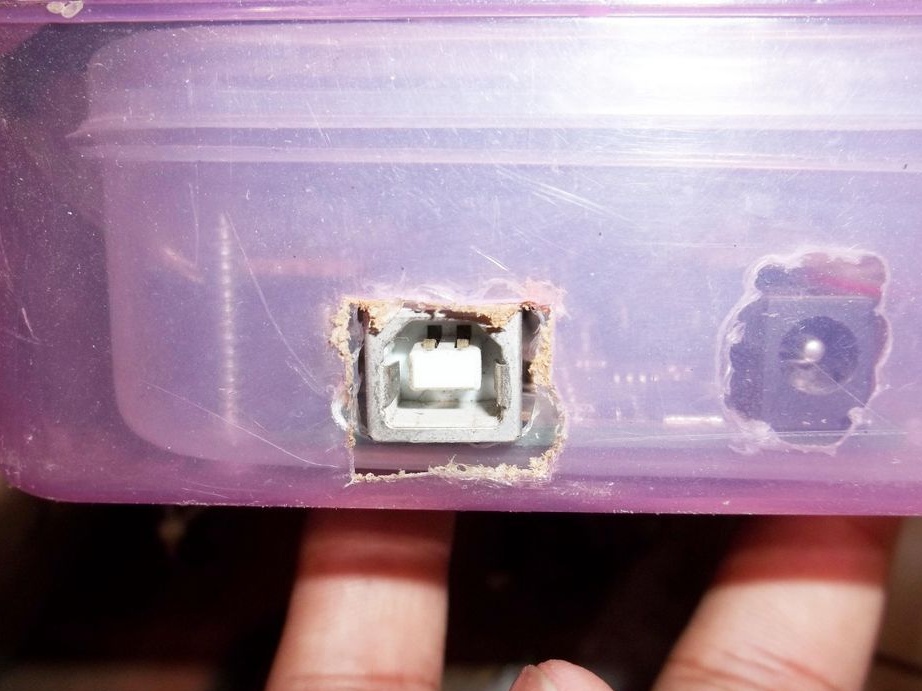
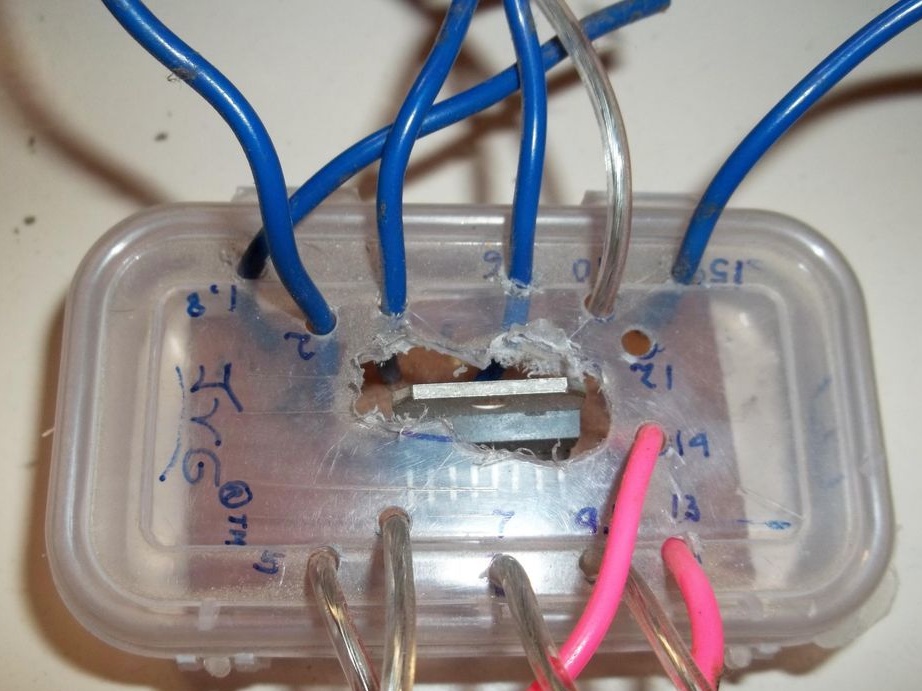
- בשלב הבא, לוח Arduino הוצב בתיק כך שפלט ה- USB נגע בקיר. נקרה חור לפלט זה, זה יעזור לטעון תוכניות נוספות למכונה, או לבצע תיקונים לקיימות. בצידי התיבה נחתכו חורים לחוטים שיעלו מהלוח. חורים נוספים נחתכו בתחתית התיבה, מתחת למחברים ההרכבה של ארדואינו.


שלב שלישי משדר Bluetooth.
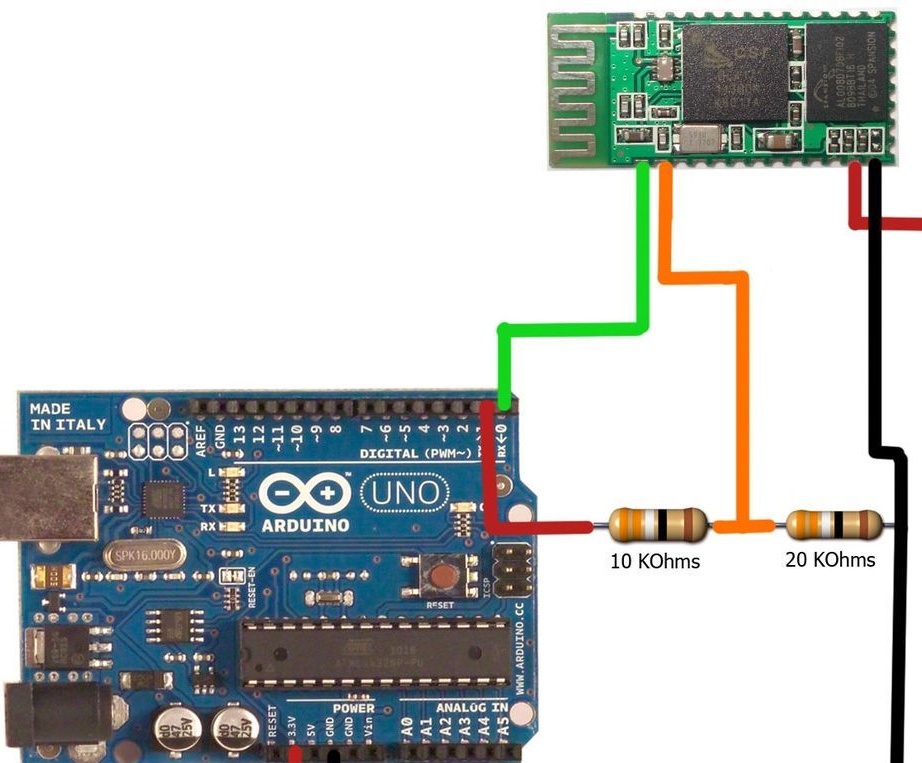
חוטי הלחמה למקלט משדר בלוטות 'הוא המשימה הקשה ביותר בהרכבת פרויקט זה, הכותבת באמת חסרה יד שלישית בעת ההלחמה. נעשה שימוש בארבעה מוליכים באורך 10 ס"מ; הם מולחמו לפינים 1 (Tx), 2 (Rx), 12 (+ 3.3B) ו- 13 (GND). כעת ניתן היה להציב את המקמ"ש בתוך בית עם חורים מוכנים מראש לחוטים. המחבר הדביק את החוטים לקופסה כדי למנוע מהתלשות החוטים את המגעים.



הצעד הרביעי. דיור לנגדים.
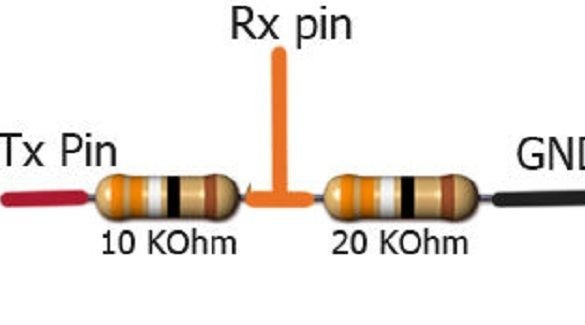
בשל העובדה כי פלט ה- Arduino Tx משדר אות עם מתח של 5V, ומודול ה- Bluetooth עובד עם מתח של 3.3V, היה צורך להמיר 5V ל- 3.3V. למשימה זו המחבר השתמש במחיצת מתח. על פי המעגל שסופק להלן, הוא הלחמה נגיעה לחלק הנותר של קרש הלחם. כמובן שאפשר היה להכניס את המעגל הזה למקרה של ארדואינו, אך לא היה מספיק מקום, ולכן המחבר הכין מעגל נפרד לנגדים.


שלב חמישי נהג מנוע.
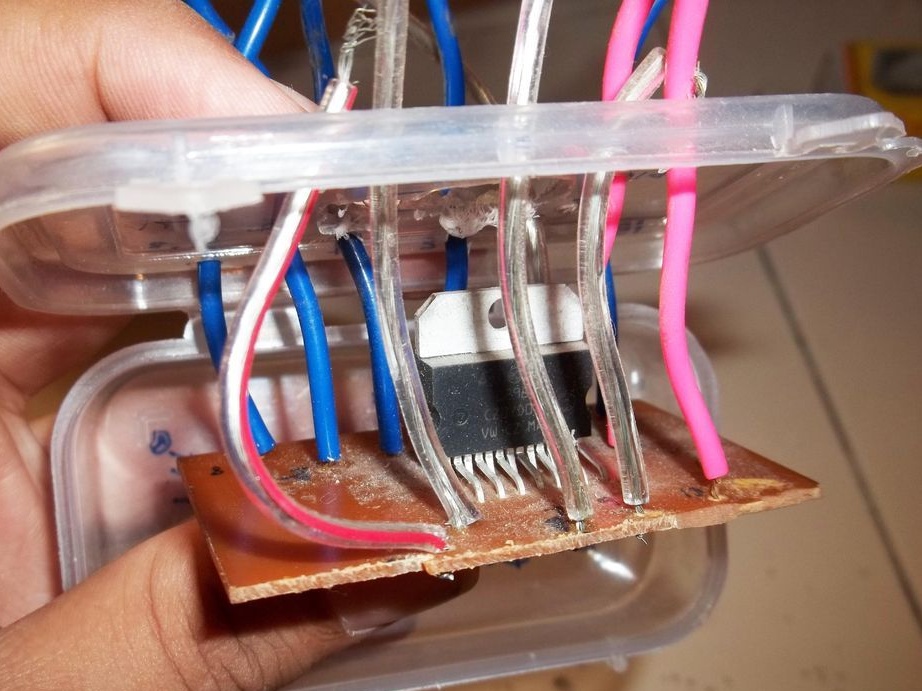
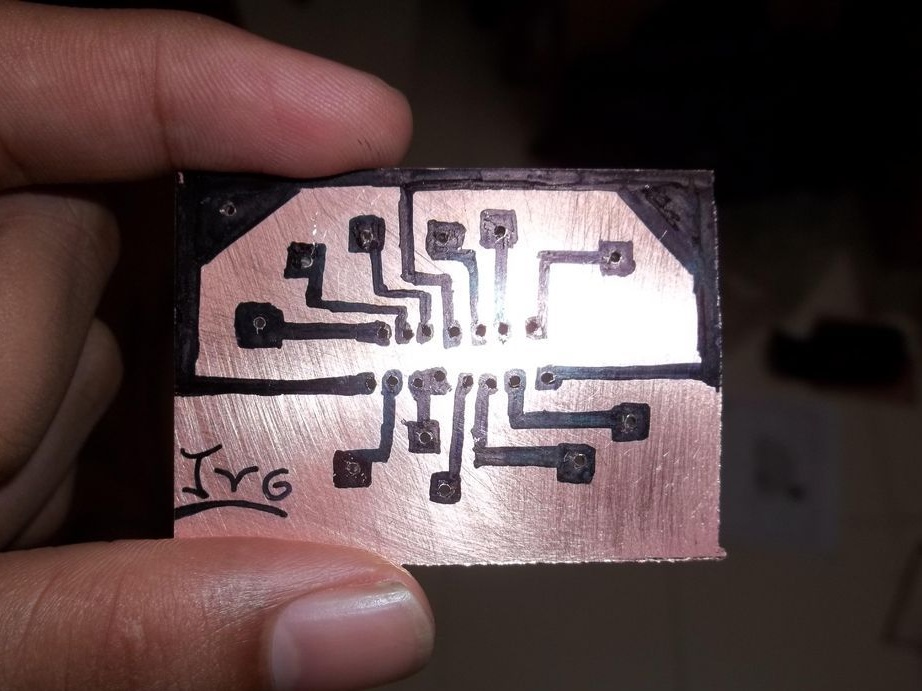
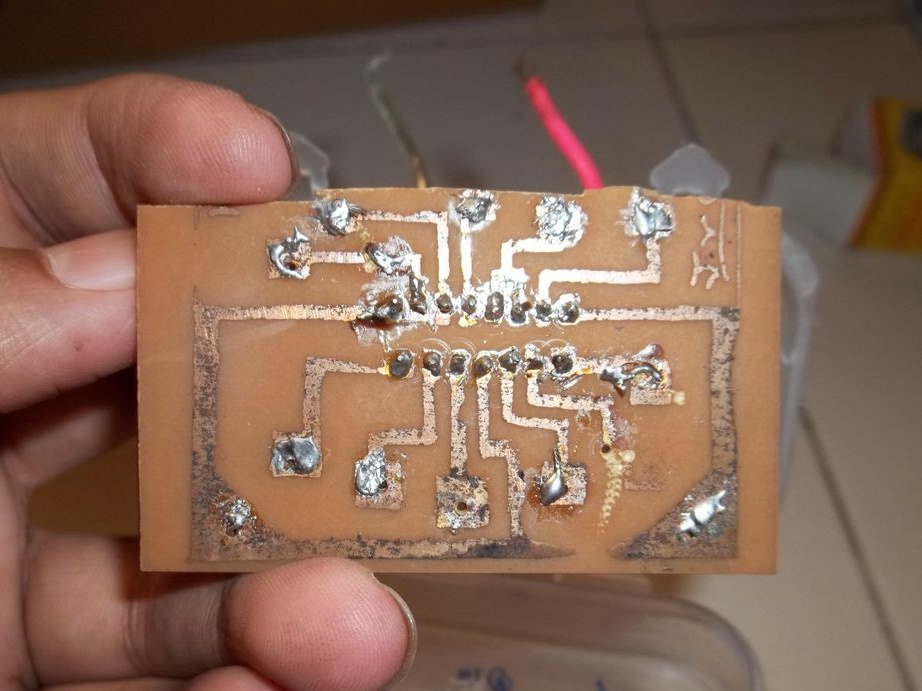
הכותב משתמש בנהג כפול עם H-bridge L298 IC, הוא שולט בארבעה מנועים. מבחינתו, המחבר יצר לוח כדי להקל עליו חוטי הלחמה, הלוח עצמו בתמונה למטה. לאחר ההלחמה הוצב הנהג בתיק נפרד עם חורים לחוטים.
שלב שישי האסיפה הסופית.
כל רכיב בודד מחובר לארדואינו בהתאם לתכנית.
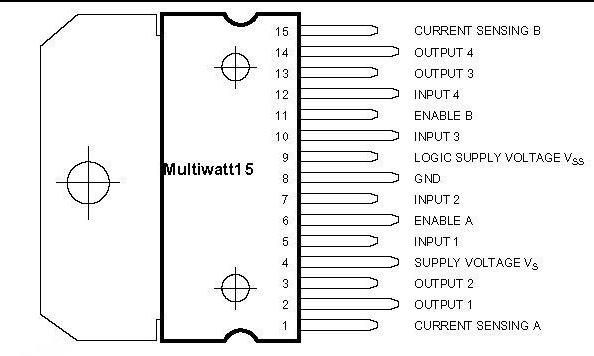
חיבור נהג המנוע עם ארדואינו התרחש על פי הצמד זה:
1 ל- GND
2 למגע הראשון של המנועים השמאלי
3 למגע השני של המנועים השמאלי
4 לסוללה של 12 וולט
5 להצמיד את ארדואינו 2
6 לסיכה ארדואינו 3
7 להצמיד את ארדואינו 4
8 ל- GND
9 עד 5 וולט עם ארדואינו
10 להצמיד את ארדואינו 5
11 להצמיד את ארדואינו 6
12 לסיכה ארדואינו 7
13 למגע הראשון של המנועים הימניים
14 למגע השני של המנועים הימניים
15 ל- GND
כוח 12 וולט היה מחובר לפין Vin Arduino ולסיכה 4 של L298. GND ארדואינו בהתאמה לספק כוח GND.
שלב שביעי. תוכנית לארדואינו.
כדי שהתוכנית תעבוד נכון, היה צורך להתקין את ספריית אמרינו, אותה ניתן להוריד. ניתן להוריד את קוד המקור של ארדואינו תחת המאמר.
שלב שמונה. תוכנה לאנדרואיד
ספריית אמרינו היא ערכת כלים לעבודה עם סמארטפונים אנדרואיד. על ידי התקנת יישום נוסף בטלפון, תוכל להתחיל לכתוב תוכנית.
ניתן להוריד את האפליקציה והתוסף של אמרינו. לאחר התקנתם בטלפון, נותר רק כדי להפעיל את ההתקן ולהתחבר אליו ובחר את הקטע הוסף אירועים-> Accelerometer Sensor Sensor.
וידאו עם התקנת אמרינו והתוספים שלו:
מהירות המכונה שווה להטיה של הטלפון. אם המכונה נעה בכיוון הלא נכון, עליך להחליף את החוטים מהמנועים.