


אחר הצהריים הטוב, היום אני רוצה לשתף הוראות להכנת טנק. יהיו שתי אפשרויות לבקר הפנימי: ESP -8266 ו- ארדואינו פרו מיני. בגירסה הראשונה השליטה מתבצעת באמצעות תקשורת Wi-Fi. בשני - IR מרחוק. הוא מיוצר על בסיס מכשיר TAMIYA 35162 Schutzenpanzer Marder 1A2 (1:35), הוא מונע על ידי ערכת תיבת הילוכים תאומית 70097 תא-מוטורית והמנועים שהגיעו עם תיבת ההילוכים.
אנו זקוקים:
- TAMIYA 35162 Schutzenpanzer Marder 1A2 (1:35)
- דבק מודל (מלט TAMIYA למשל)
- ערכת תיבת הילוכים דו-מוטורית טאמיה 70097
- ESP 8266 -12E או Arduino Pro Mini 8MHz 3.3V
- מייצב מתח AMS 1117 3.3v 8000mA (אם אפשרות עם ESP 8266-12E)
- נהג מנוע Qifei L9110
קבלים 10v 1000uF
- לד שני צבעים (אדום, ירוק)
- LED כחול
- 2 נוריות LED אדומות
- מקלט IR
- פוטורסיסטור
- 2 תאים ל -2 סוללות AAA או 4 סוללות AAA 1.2V 1000mA NI-MN
- 2 נגדים 2ohm
- 4 נגדים 75 אוהם
- 6 נגדים 10 kOhm (אם אפשרות עם ESP 8266-12E)
- כפתור
- פוטורסיסטור
- USB - TTL
- הלחמה
- חוטים רב צבעוניים
שלב 1 שיכון ומכניקה.
ראשית עליך לאסוף המודל TAMIYA 35162 Schutzenpanzer Marder 1A2 (1:35). אנו מדביקים את החלק התחתון על פי ההוראות, למעט החלקים המכסים את פתחי השקע לפירים של תיבות ההילוכים. כוכבים מובילים גם לא נדבקים. הדבק את החלק העליון לפי ההוראות ללא שינויים. לאחר הדבקת כל זה, השאירו לייבוש והמשיכו לאיסוף תיבת ההילוכים. כפי שניתן לראות מההוראות ניתן להרכיב את Tamiya 70097 בשתי גרסאות שונות.
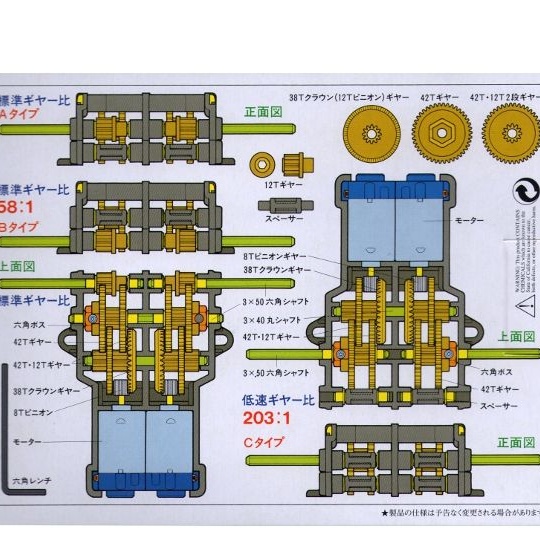
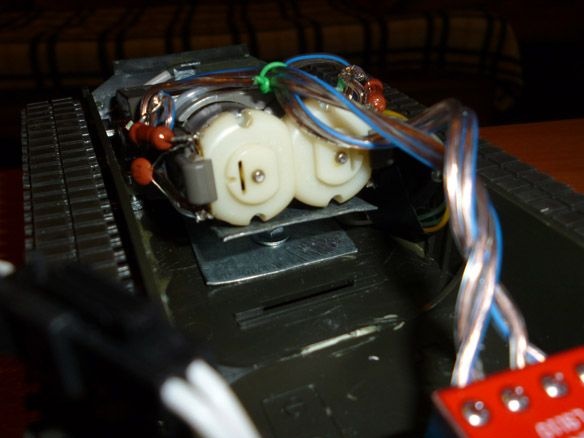
האפשרות הראשונה עם יחס הילוכים של 58: 1, השנייה - 203: 1. אנו זקוקים לאפשרות הראשונה. וגם כאן זה לא כל כך פשוט. במקרה זה, תפוקת הצירים עשויה להיות קרובה יותר לתחתית תיבת ההילוכים או לאמצע. יש לנשוף צירים לחור האמצעי! לאחר הרכבת תיבת ההילוכים, אנו ממשיכים להתקין אותה בדגם. להלכה, הכל צריך להיות פשוט, מכיוון שגם הדגם וגם תיבת ההילוכים של חברה אחת. בפועל - היה צריך לדחוף לשם את תיבת ההילוכים. במיקום האופקי של תיבת ההילוכים, פירי גלגלי ההינע התנודדו כלפי מעלה, ולכן היינו צריכים לחתוך פלטת מתכת, מה שאפשר לנו לתקן את תיבת ההילוכים במצב הרצוי.

יש לחתוך את סרני תיבת ההילוכים ב -3 מ"מ. ואז דבק עליהם את גלגלי הכונן.

בחלק העליון קרוב יותר לגב, אנו מייצרים חורים עבור מקלט LED וצבע IR בשני צבעים.

קרוב יותר לחזית הוא חור לפנס LED כחול שישמש כפנס.

ובתוך הפתח - לצילום היסטוריה.

בצד האחורי הדביקו את נורות הלד האדומות להארה.

לכל האמור לעיל, אתה צריך להלחם את החוטים. נוח יותר לעשות זאת לפני ההתקנה.
שלב 2 חשמלאי
כאן אביא בחירה של אפשרויות להרכבה נוספת.
אם בחרת ב- ESP 8266. מודול ה- Wi-Fi המובנה מקל מאוד על תהליך השליטה והחיבור.ניתן לתכנת אותו בקלות ב- IDE של Arduino. עדיף לבחור מודול עם זיכרון של 4 מגהבייט. במקרה זה, יש צורך לאסוף את הרתמה המינימלית להפעלת והברקה של ה- ESP-8266. רק סיכת ה- VCC מחוברת ישירות לאספקת החשמל, את הסיכות הנותרות: CH_PD, RESET, GPIO0, GPIO2, יש למשוך אל ספק הכוח (VCC) דרך נגדי. נגדי 10kOm ניתנים להחלפה באחרים, מ- 4.7kOm ל- 50kOm, למעט GPIO15 - ערכו חייב להיות עד 10kOm. ישירות, למינוס (GND) של ספק הכוח, אנו מחברים רק GND, ואנחנו גם מושכים את ה- GPIOO דרך הנגד ל 10kOm, בכדי להכניס את המודול למצב הורדת הקושחה, ל- GND. הכפתור נחוץ להפעלה מחדש והבזק של המודול. מחבר USB-TTL - לקושחה.
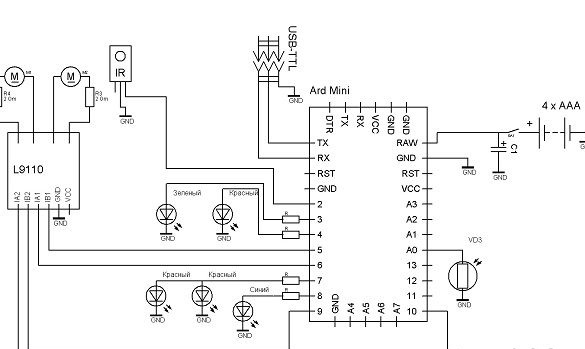
להלן תרשים
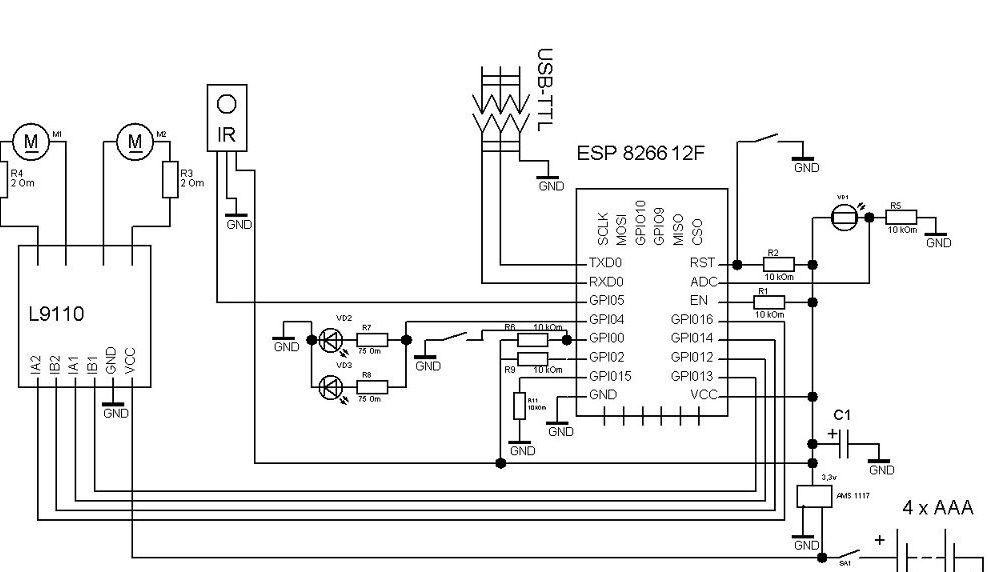
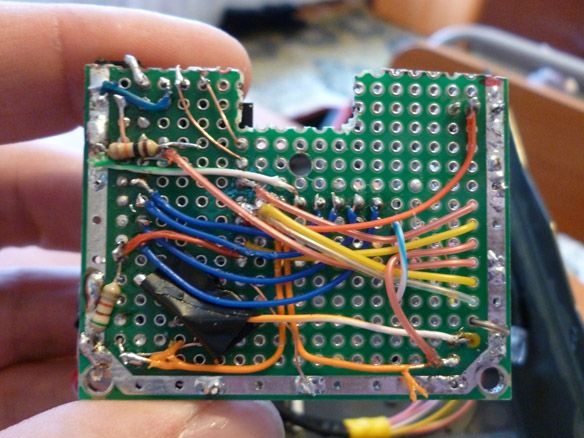
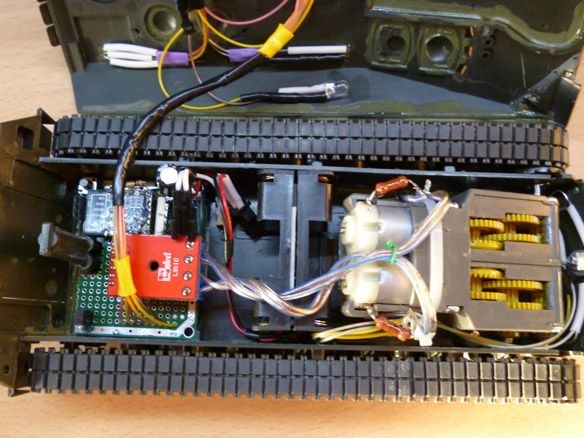
הרשו לי להסביר מעט, נורות הלד הכחולות ושתי האדומות דרושות לתאורה אחורית (היא נראית ויפה בחושך), הפוטורסיסטור מחובר ל- ADC של הבקר ונחוץ לקביעת התאורה (כאשר התאורה האחורית מתכהה). 10 נגדי משיכה של 10 kOhm, 75 אוהם לד נוריות, 2 מגהץ זרם אוהם למנועים (בלעדיהם, כשמנסים להזיז, הבקר העמיס יתר). אנו מבצעים הלחמה של הכל לפי המעגל בלוח המעגל. עבור אספקת חשמל, אתה יכול להשתמש ב -4 סוללות "קטנות" או בארבע סוללות בגודל AAA, מולחמות בסדרות. אנו מדביקים שני תאים של שתי סוללות עם סרט דו צדדי ומתחברים בסדרה. שני תאי הסוללה והמצברים ממוקמים בין תיבת ההילוכים ללוח המעגל.

אם הבחירה שלך נפלה על הארדואינו. רק Arduino Pro MINI נכנס פנימה. כדאי לבחור לוח 3.3 וולט, מכיוון שהמנועים מיועדים לשלושה וולט, ואתם לא רוצים להפעיל בנפרד את המנועים ואת הארדואינו. קל יותר Arduino. רתמת הבקר כולה וווסת המתח כבר נמצאים על הלוח עצמו. זה נותר כדי להפשיר את שקע הארדואינו ואת נהג המנוע בלוח המעגל.

שלב 3 הכנת סביבת התכנות.
כדי לערוך את הקושחה ולמלא את הסקיצה ב- ESP, עליכם להתקין את ה- Arduino IDE מהאתר הרשמי של Arduino.cc, כמו גם להתקין את התוסף עבור ESP, דרך מנהל הלוחות. לשם כך, התחל את ה- Arduino IDE ואז הקובץ - הגדרות - בשדה כתובות URL נוספות של מנהל לוחות, הכנס את הקישור
http://arduino.esp8266.com/package_esp8266com_index.jsonלחץ על אישור (אתה יכול להזין מספר קישורים המופרדים באמצעות פסיק בשדה זה). הכלים הבאים - לוח - מנהל לוחות, הזן את esp8266 בשדה הסינון ולחץ על ESP8266 על ידי פורום הקהילה ESP8266. לחץ על התקן והמתן לסיום ההורדה. כעת נותר לבחור את הלוח - Generic ESP8266 בתפריט כלים ולהגדיר את תדירות המודול שלך ל 80 או 160 מגה-הרץ, גודל זיכרון הבזק ולבחור את היציאה הסדרתית שאליה מחובר מתאם USB-TTL.
עבור ארדואינו, התקן את ה- Arduino IDE מאתר Arduino.cc הרשמי.
שלב 4 קושחה
נותר לערוך את הסקיצה ולמלא אותה ב- ESP.
בשדה "מחרוזת _ssid =" ";" בין הצעות מחיר מציינים לאיזו נקודת גישה שאליה ברצונכם להתחבר.
"מחרוזת _password =" ";" היא הסיסמה עבור רשת זו.
"String _ssidAP =" מרדלה ";" שם הרשת שתעלה ה- ESP אם היא לא תתחבר לרשת הקיימת.
"String _passwordAP =" 12345678 ";" - סיסמת הרשת ש- ESP תגייס אם היא לא תתחבר לזו הקיימת.
"String SSDP_Name =" מרדלה ";" שם SSDP
לאחר ההתחלה, ESP מנסה להתחבר לנקודת הגישה שצוינה במערכון, אם הצליח, עליך לקבוע את כתובת ה- IP של הרובוט שלנו ולהתחבר לכתובת זו באמצעות דפדפן. אתה יכול גם לעבור מחשב לתשתית הרשת, למצוא שם את הטנק שלנו ולחץ לחיצה כפולה כדי להתחבר אליו. אם החיבור נכשל, ה- ESP הופך לנקודת הגישה. ואז ניתן לקבל גישה על ידי חיבור לנקודת גישה חדשה והכניסה 192.168.1.1 בדפדפן.
ממשק האינטרנט מורכב משני עמודים. הראשון ששולט. השנייה מיועדת להתאמה אישית. בדף השני תוכל לציין את נקודת הגישה שאליה ברצונך להתחבר, כמו גם את שם הטנק ואת שמו והסיסמה של נקודת הגישה ש- ESP מעלה. כל השינויים נכנסים לתוקף לאחר אתחול מחדש. ניתן גם להפעיל מחדש את המודול דרך ממשק האינטרנט.
עבור Arduino, אתה צריך לערוך את כל השדות "results.value". לאחר שרשמת את קודי ה- IR של המסוף שאתה הולך להשתמש בו.

טנצ'יקה של וידאו: