


אחר הצהריים הטוב, אני רוצה לשתף הוראות לחשמל של המודל להדבקה בקנה מידה 1/35 של טמיה 35163 JGSDF TYPE 61 TANK. לתנועה נשתמש בתיבת ההילוכים הכפולה Tamiya 70097, וכבקר ה- ESP 8266-12E. שליטת Wi-Fi באמצעות מעטפת אינטרנט.
אנו זקוקים:
- טמיה 35163 JGSDF סוג 61 טנק (1:35)
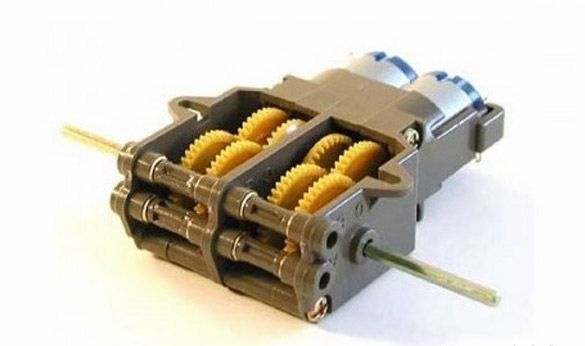
- ערכת תיבת הילוכים דו-מוטורית תמיא 70097 תא מנוע Redutcor
- דגם TAMIYA דבק מלט
- ESP 8266 -12E או ESP 8266 -12F
- AMS 1117 3.3v 800mA - מייצב מתח
- נהג מנוע Qifei L9110
- קבל 10v 1000uF
- תא פתוח לשתי סוללות AAA
- 4 סוללות AAA או 4 סוללות AAA 1.2V 1000mA NI-MN
- 2 אוהם נגד 2 יחידות.
- נגד 10 kOhm 6 יח '.
- כפתור
- מתג
- USB - TTL
- מעגל מעגל
- הלחמה
- חוטים רב צבעוניים
שלב 1 שיכון ומכניקה.
ראשית, עלינו להדביק את זה המודל תמיה 35163. פתח את התיבה:
התחל בהחדרת פרטי הדגם. יש לחתוך את החלקים הבולטים או את שרידי המסגרת בעזרת סכין או לנקות אותם עם נייר זכוכית. אנו מרכיבים את החלק התחתון של הגוף על פי ההוראות, עליכם לא רק להדביק את החלקים להתקנת גלגלי הכונן. בדיוק יישמתי את הפרטים האלה לצילום:

בצד האחורי זה נראה כך:

היזהר שלא להדביק את תקעי הגלגלים בדבק, על כל הגלגלים להסתובב בחופשיות. יש להדביק גם זחלים בצומת. לאחר הרכבת השלדה, עדיף לתת לו להתייבש היטב לפני פעולות נוספות:

בזמן שהמרכב מתייבש, הדבק את החלק העליון. ראשית, הבסיס. ישנם חלקים קטנים רבים, עדיף להשתמש בפינצטה להדבקה של חלקים כאלה. בסיס מודבק:

אנו אוספים את המגדל. קיימות שתי אפשרויות למגדל. ההבדל נעוץ בפרטי הרכבת החבית למגדל. האפשרות הראשונה היא הרכבה סטנדרטית, השנייה עם הגנת אבק. כדאי לבחור איזה אתה הכי אוהב. הבדל זה בא לידי ביטוי רק במראה. הוא הדביק את הדגם בחגי ראש השנה, אז הוא גם הלביש את המכל:

להרכיב ולהשאיר לייבוש:

בזמן שהדגם מתייבש, נעבור להרכבת מנוע ההילוכים. אנו נשתמש במנוע הילוכים ומנועים המיוצרים על ידי אותה החברה כמו הדגם, כלומר תמיה 70097:
ההוראות שמגיעות עם הערכה אינן כוללות את השפה הרוסית, אך היא כבר מובנת.שתי אפשרויות הרכבה מתוארות שם בפירוט:
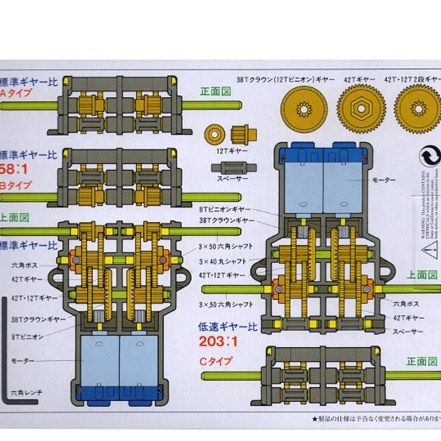
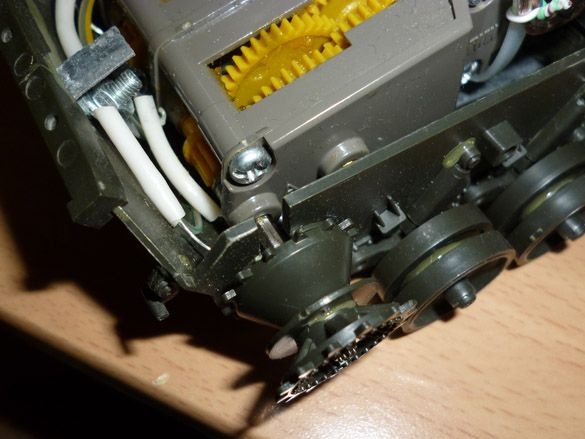
במקרה הראשון, יחס ההילוכים הוא 58: 1, השני - 203: 1. אנו משתמשים באפשרות הראשונה. את פירי הפלט של תיבת ההילוכים יש לעבור דרך החורים המרכזיים. יש לחתוך את העיניים הצדדיות של תיבת ההילוכים, הן יפריעו להתקנה על הדגם. אחרת, תיבת ההילוכים די פשוטה להלבשה על הדגם. ואז שמנו הילוכים קטנים על המנועים ומכניסים אותם לתיבת ההילוכים. עבור כל אחד מהמנועים יש להלחם נגן של 2 אוהם לאחד המגעים. אנו מבצעים הלחמה של חוט אחד אל הנגד, והחוט השני למגע השני של המנוע. לאחר שסיימנו להתקין את המנועים, שמנו את מנוע ההילוכים המורכב על הדגם. מהדקים בעזרת דבק.
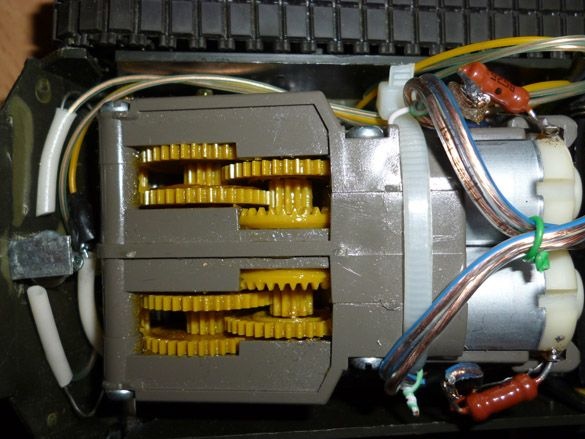
אנו גם מניעים את גלגלי ההינע אל פירי הפלט.
התוכניות העתידיות כוללות הוספת פונקציית סיבוב הצריח ואולי גם ירי נשק. בהוראות שלהלן אנסה לתאר את השינויים האלה.
שלב 2 חשמל.
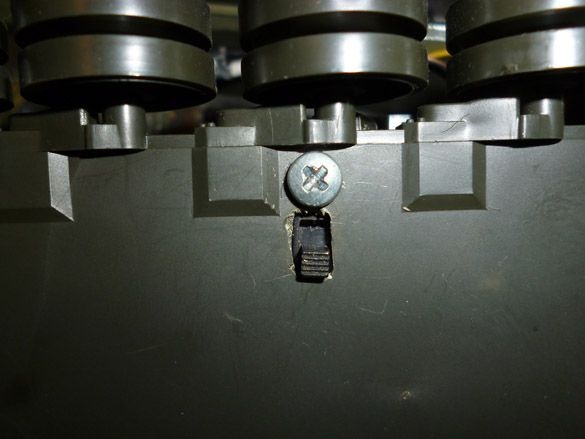
לאחר שאספת את הדגם, ומחכה לייבוש מוחלט, עבור אל ה מלית. בחלק התחתון חתכנו את המתג:
שני תאי סוללה מולחמים בסדרות ומודבקים זה לזה. אנו גם מוציאים מחבר נוח בסוף החוטים.

להפעלת הדגם, תוכלו להשתמש בסוללות AAA ("קטנות") או בסוללות AAA בנפח 1.2 וולט.
קח את ה- ESP8266. זהו מודול קטן אך פונקציונלי למדי, ומודול ה- Wi-Fi המובנה מספק חיבור אליו בבית רשת Wi-Fi. אני ממליץ לבחור מודול עם זיכרון של 4 מגהבייט. כדי להפעיל ולהבהב את ESP-8266 ESP, עליך להרכיב כריכה מינימלית. המודול מופעל על ידי 3.3 וולט. לא ניתן לחבר אותו ישירות למקור כוח לא יציב. לכן אנו כוללים במעגל מייצב מתח AMS 1117 3.3v. סיכת ה- VCC מחוברת ישירות לכבל אספקת החשמל החיובי מהמייצב, ואת הפינים הנותרים: CH_PD, RESET, GPIO0, GPIO2, חייבים להיות מחוברים דרך נגן, כלומר נמשך לאספקת החשמל (VCC). מומלץ להשתמש בנגדים של 10kOm, אך ניתן להחליף אותם באחרים מ- 4.7kOm ל- 50kOm. אי אפשר לשנות רק את הנגד GPIO15, ערך הפנים שלו צריך להיות עד 10k. ישירות, אנו מחברים רק GND לחוט החשמל השלילי (GND). כדי להיכנס למצב הקושחה של המודול, GPIO0 חייב להיות מחובר ל- GND. הכפתור נדרש כדי לאתחל את המודול כאשר הוא מהבהב. המסקנות של Tx, Rx, GND נעשות במחבר USB-TTL. חיבור USB-TTL הוא כדלקמן:
ESP 8266 - USB-TTL
Tx - Rx
Rx - Tx
GND - GND
התוכנית היא כדלקמן:

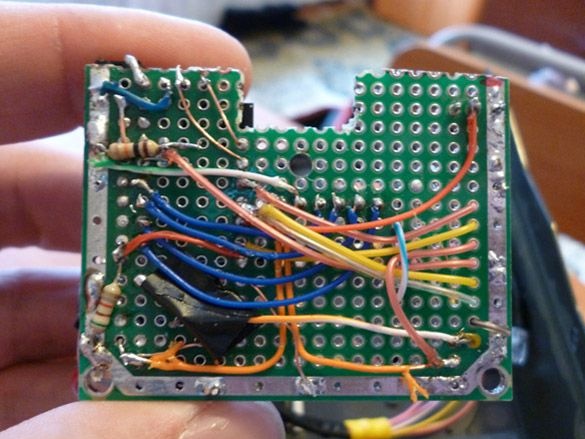
הכי נוח למקם את הכל על גבי מעגל קטן:
אנו מקבעים את לוח המעגל בחלק האחורי של המכל:
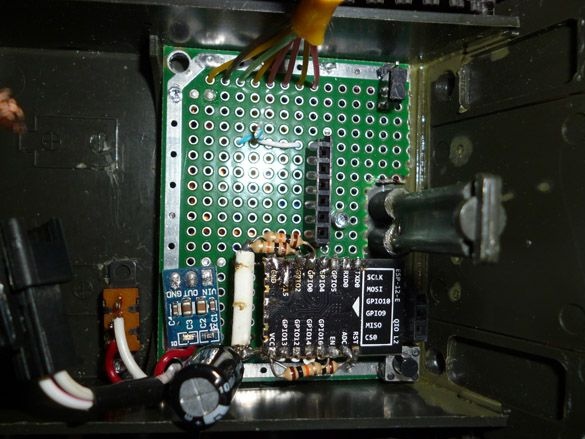
תא הסוללה ממוקם בין מנוע ההילוכים ללוח המעגלים:

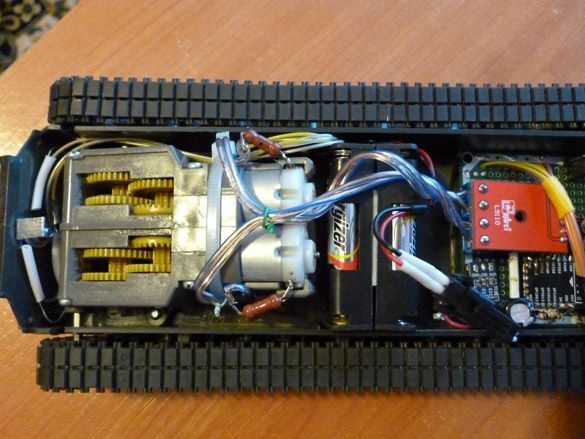
כל האלקטרוניקה שהורכבה והותקנה ממוקמת בחלקו התחתון של המיכל:
שלב 3 תוכנה.
כדי לערוך ולמלא את הסקיצה ב- ESP עליכם להוריד ארדואינו IDE מהאתר הרשמי
Arduino.cc.
ואז התקן את ה- Arduino IDE. לאחר מכן אנו ממשיכים להתקין את התוסף עבור ESP. אנו עושים זאת באמצעות מנהל הלוחות. ראשית, הפעל את ה- Arduino IDE ואז את קובץ - הגדרות - בשדה כתובות URL נוספות של מנהל לוחות, הכנס את הקישור:
http://arduino.esp8266.com/package_esp8266com_index.jsonלחץ על אישור (אתה יכול להזין מספר קישורים המופרדים באמצעות פסיק בשדה זה). לאחר מכן עבור אל כלים - לוח - מנהל לוחות בשדה הסינון, הזן esp8266 ובחר ESP8266 על ידי ESP8266 פורום הקהילה. לחץ על התקן והמתן לסיום ההורדה. כעת אנו בוחרים מהתפריט כלים - לוח - גנרי ESP8266 אנו קובעים את התדר של המודול שלך 80 או 160 מגה-הרץ, גודל זיכרון הבזק. לאחר מכן בחר ביציאה הסדרתית שאליה מחובר מתאם USB-TTL.
עכשיו אתה צריך להתקין את הכלי כדי לגשת למערכת הקבצים ESP. לשם כך, העבירו את הקבצים בארכיון לתיקיית הכלים, שניתן למצוא בספריית השורשים של ה- Arduino IDE.
שלב 4 סקיצה
כעת, לאחר שסביבת התכנות מוכנה, נעבור לעריכת הסקיצה. פתח את הסקיצה:
בתחילתו אנו מחפשים את השדה "מחרוזת _ssid =" ";". בין הציטוטים, ציין לאיזו נקודת גישה אתה רוצה להתחבר.
שדה "מחרוזת _password =" ";" - משמש להקלטת הסיסמה לרשת זו.
אם ה- ESP לא יכול להתחבר לרשת המצוינת בשורות הקודמות, הבקר יצור רשת שאליה הוא יכול להתחבר.
שדה "מחרוזת _ssidAP =" ";" - מציין את שם הרשת שנוצרת.
שדה "מחרוזת _passwordAP =" 12345678 ";" - מגדיר את הסיסמה של הרשת שנוצרה.
שדה "String SSDP_Name =" ESP_Wi-Fi ";" - מגדיר את שם ה- SSDP.
לאחר עריכת כל השורות לעיל, עליך להעלות את מעטפת האינטרנט ל- ESP 8266. אנו מחברים את ה- ESP 8266 דרך USB-TTL למחשב על פי התרשים למעלה. ב- IDE של Arduino, בחר כלים - ESP8266 העלאת נתוני סקיצה. אנו מחכים לסיום תהליך העלאת הקובץ. כעת תוכלו להקליט את הסקיצה עצמה. ראשית, הכניסו את ה- ESP8266 למצב הקושחה. לשם כך, חבר את GPIO0 ל- GND. לחץ על לחצן מילוי הסקיצה ואז לחץ על לחצן האיפוס במודול ה- EPS. מחכה לשרטוט שיסיים את המילוי.
אני אסביר מעט את האלגוריתם של ESP 8266. בעת ההפעלה, EPS מנסה להתחבר לרשת ה- Wi-Fi שצוינה בשדה String _ssid. אם מסיבה כלשהי זה נכשל, ESP מעלה את הרשת שלה עם השם שצוין בשדה ssidAP. במקרה הראשון, תוכלו לשלוט במיכל דרך כל מכשיר המחובר לאותה רשת. במקרה השני, עליכם להתחבר ל- ESP דרך כל מכשיר, טאבלט, טלפון או מחשב. בשלב הבא, בדפדפן המכשיר דרכו אנו נשלט על הטנק, עליך להזין את כתובת ה- IP של הטנק. אתה יכול לגלות את כתובת ה- IP על ידי חיבור ה- ESP למחשב, ואז לפתוח את חלון המסוף ולהפעיל מחדש את ה- ESP. כאשר יושק, כתובת ה- IP של הטנק תיכתב בחלון המסוף. לחלופין, תוכל לציין כתובת IP קבועה שהוקצתה על ידי ESP בהגדרות הנתב Wi-Fi. כמו כן, אם אתה משתמש במחשב עם Windows, אתה יכול להיכנס לתשתית הרשת, למצוא שם את הטנק שלנו ולחץ פעמיים כדי להתחבר אליו. אם ה- ESP עצמו מעלה את נקודת הגישה, כתובת ה- IP של הטנק תהיה 192.168.1.1.
ממשק האינטרנט כתוב ב- HTML ומורכב משני עמודים. הראשונה כוללת פקודות בקרה. בשני, אתה יכול לשנות את ההגדרות של ESP 8266. בדף ההגדרות, הפרמטרים הבאים זמינים לשינוי: שם נקודת הגישה שאליה ברצונך להתחבר, הסיסמה של נקודת גישה זו, שם הטנק, שם הרשת שנוצרת והסיסמה לחיבור לרשת זו. כל השינויים ייכנסו לתוקף רק לאחר אתחול מחדש. תכונת הטעינה מחדש של ESP זמינה גם מממשק האינטרנט.
לאחר השלמת כל העבודות ניתן לצבוע את המיכל באמצעות צבעי דגם. המיכל המצויר נראה יפה יותר:

אין לי סבלנות לתפקיד כזה. לכן הדגמים שלי נותרים ללא ציור:

