

בסרטון תוכלו לראות כיצד הרובוט עובד. זה משנה בהדרגה צבע במהלך הפעולה.

חומרים וכלים להרכבת הרובוט:
- סוגרי הרכבה בצורת U;
- ארבע סוללות 1.5R LR44 כל אחת;
- RGB-LED רב צבעוני עם פונקציית מיתוג;
- צינורות בידוד;
- סיכה מפלדה;
- מנוע מתח נמוך RF-300CA;
- כפתור להפעלת הרובוט (עם שני מובילים);
- חוטים לחיבור המנוע;
- נורית אזעקה מהבהבת.
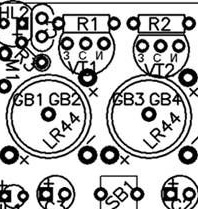

לגבי ההכרחי אלקטרוני אלמנטים, הם מוצגים באיור. הלוח המודפס עשוי מדף נייר כסף של PCB, מידותיו 30X30 מ"מ בלבד. המחבר ממליץ גם על שימוש בקבלים קוטביים קטנים להרכבה.
תהליך ייצור רובוטים
צעד ראשון. תרשים סכמטי של הרובוט
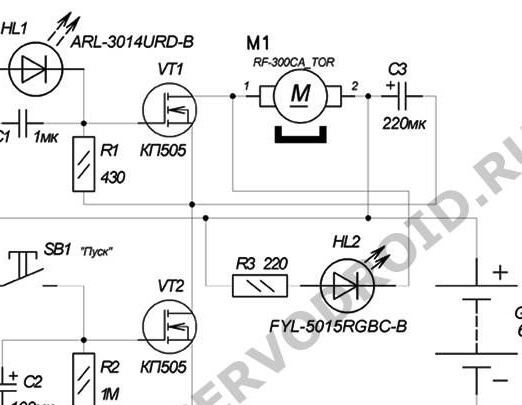
ניתן לראות את מעגל הרובוט באיור. לאחר הכנסת הסוללה, הרובוט במצב כבוי, כדי להפעיל אותו, לחץ על לחצן SB1. מיד לאחר מכן, הקבל C2 נטען מיידית. הפלטה החיובית מהקבל מחוברת לשער של טרנזיסטור אפקט השדה VT2. בהקשר זה, כשמגיעים לסף המיתוג, ההתנגדות של תעלת מקור הניקוז של תעלה זו יורדת מייד ונוצר מטען פוטנציאלי שלילי בביוב. ובכן, מה שקורה אחר כך ניתן לראות ביתר פירוט בתרשים.
שלב שני הר RGB LED
הנורית מתחת למספר 1 מותקנת בלוח המעגלים המודפס. בציור נקרא מיקום זה HL2. לאחר התקנת הלד, יש לכופף את מסקנותיו כך שהנורית תופנה לצד. כך, במהלך הפעולה, הזרקורי LED לא יאירו כלפי מעלה, אלא לצדדים, ויאירו את הקירות. לאיזה כיוון האור יאיר מסומן על ידי חץ שחור.

שלב שלישי הר סוגרי הרכבה של סוללה
כדי לספק מגע בין הסוללה לרובוט, משתמשים בסיכות דחיפה.כפתור אחד מותקן במרכז, בתרשים הוא מסומן כ- GB1, GB2, והשני מוגדר למיקום GB3, GB4. כדי לתקן את אנשי הקשר בצורה מאובטחת, הלחצנים מולחמים בכמות גדולה של הלחמה.


סוללות מותקנות על כפתור המתכת מתחת למספר 3. הסוללות מקובעות עם אטב בצורת U, עליו נלבשים מבודדים מצינורות. את החלק העליון של הסוגר צריך להיות כפוף מעט עם קשת כלפי מטה, זה יאפשר לחיצה על הסוללות למגע התחתון. יש צורך בצינורות בידוד כך שהפנים האנכיות של הסוללות לא יבואו במגע עם אלה האופקיים.
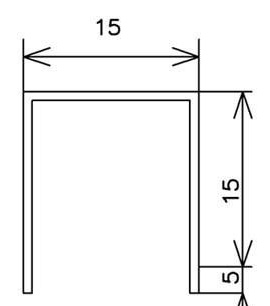
כדי להכין אטב בצורת U, עליך להשתמש בשני מהדקי נייר. הם צריכים להיות כפופים לצורת U, כפי שמצוין בציור. ניתן להשתמש בכל צינורות, פוליוויניל כלוריד משמש כאן. גובהם אמור להיות שווה לגובה הסוללות.
התקן את התושבת על ידי הלחמה, לשם כך אתה צריך לסנן את קצותיו. לצורך השיזוף יש צורך להשתמש בשטף ניטרלי ולא שוטף.
שלב רביעי התקן את המנוע
המנוע מותקן בצד הלוח בו עוברים המסילות, הוא ממוקם עם הפיר כלפי מטה. כדי להדק את המנוע, אתה יכול להשתמש בדבק חם או בסרט דו צדדי. אך לפני שתרכיב בחוזקה את המנוע, עליך לחבר אותו ולבדוק אם המערכת פועלת כולה.

שלב חמישי התקנה ובדיקה תוצרת בית
לאחר הרכבת הרובוט תוכלו לבדוק ולהגדיר את התצורה. לשם כך עליכם להתקין סוללות ברובוט, הם מותקנים במקום GB1, GB2 ו- GB3, GB4. במקרה זה, האלקטרוניקה חייבת להיות במצב כבוי. לאחר התקנת הסוללות ניתן להפעיל את הרובוט, הדבר נעשה באמצעות כפתור SB1. לאחר לחיצה עליו, המנוע צריך להתחיל לעבוד, נורית ה- HL1 תבהב, ונורית ה- RGB תידלק.
לאחר זמן מה, הרובוט יכבה אוטומטית, הוא ייפסק וכל הדיודות יכבו. לאחר מכן הוא מופעל באותו אופן כמו בפעם הראשונה, על ידי לחיצה על כפתור.

כדי להתאים את זמן הרובוט, אתה צריך להתנסות בערכים של הנגד R2 והקבל C2, הם אחראים לפונקציה זו. אם אתה צריך להגדיר את הפעולה המרבית של הרובוט, הקבל צריך להיות גדול ככל האפשר. בצורה כל כך פשוטה אתה יכול להרכיב רובוט כה מעניין.