

סרטון עבודה ברובוט
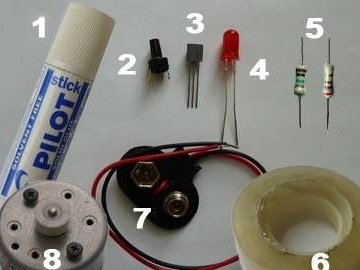
חומרים וכלים ליצירת רובוט:
- מקל דבק יבש;
- קלטת שקופה;
- כפתור דו קבוע לא קבוע;
- LED מהבהב אחד מסוג ARL-513URC-B;
- טרנזיסטור KP505A;
- שני נגדים בערכם הנקוב של 1M ו- 270 אוהם;
- מחבר קליפס לחיבור לסוללה מסוג "קראון";
- דגם מנוע RF-300CA-D / C 3V או דומה.

פונקציונליות ומאפייני הרובוט:
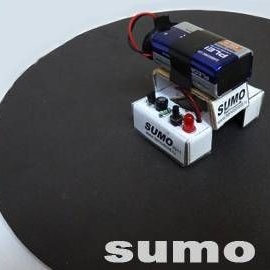
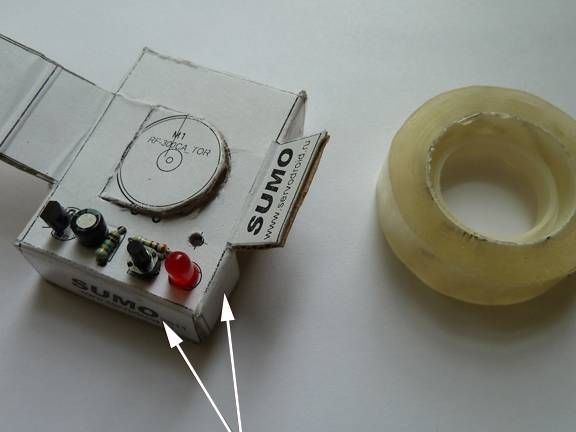
בתמונה אתה יכול לראות כבר מורכב הרובוט. כדי להזיז את המכשיר משתמשים רק במנוע אחד, הוא מותקן אנכית, אך בזווית מסוימת. כאשר נע בקטע קצר, הרובוט נע בקו ישר ועושה קשת בקטע ארוך יותר.
כפתור אחד משמש להפעלת הרובוט: כאשר הוא לוחץ עליו הרובוט נדלק למשך 20 שניות. לאחר מכן מתרחשת כיבוי אוטומטי, והרובוט נמצא במצב המתנה עד להפעלה הבאה.
מאפיין נוסף של הרובוט הוא שהוא נעצר אוטומטית בקצה הטבעת. מילוי תנאי זה אפשרי אם משקל היריב לא יהיה פחות ממשקל הרובוט ועובי הטבעת לא יהיה פחות מ -3 מ"מ.
כאן, סוללת 9 וולט משמשת כמקור כוח, היא מותקנת על גבי הרובוט. בזכות המשקל הנוסף, הרובוט צובר את האנרגיה הקינטית הדרושה לפעולות הנחוצות.
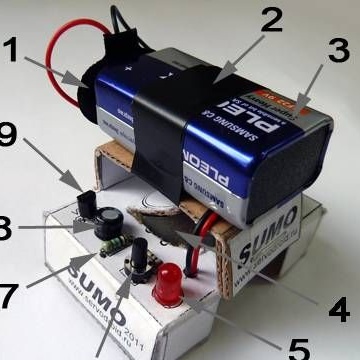
בתמונה, רכיבי הרובוט מסומנים במספרים:
1. קליפ לחיבור הסוללה.
2. תפס סוללה.
3. ספק כוח (9 וולט סוללה).
4. המנוע.
5. LED מהבהב (מציין שהחשמל מחובר).
6. לחצן להפעלת הרובוט.
7. נגד, בזכותו אתה יכול לקבוע את זמן הרובוט.
8. קבל, הוא גם אחראי לזמן הרובוט.
9. טרנזיסטור מסוג KP505A, זהו נהג מנוע.
תהליך הרכבת רובוט:
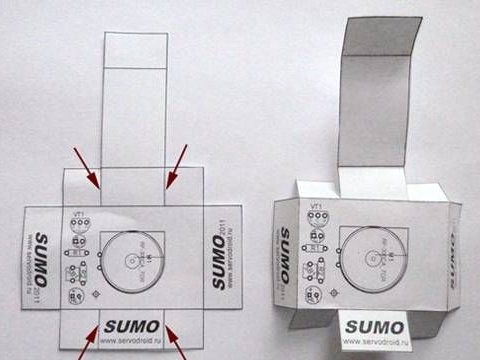
צעד ראשון. אנחנו עושים את המקרה
כדי לטעון את המקרה, המחבר משתמש בקרטון גלי, אתה צריך להחיל עליו קווי מתאר על פי התבנית. ניתן להדפיס את התבנית על מדפסת, היא מחוברת למאמר. יתר על כן, לאחר ביצוע הקפלים הדרושים ניתן לחתוך את התבנית לאורך קווים עבים. כדי להתקין את המנוע, אתה צריך לחתוך חצי מעגל בקרטון, ואז לכופף אותו מעט, כמצוין בתמונה.


שלב שני התקנת אלמנטים רדיו
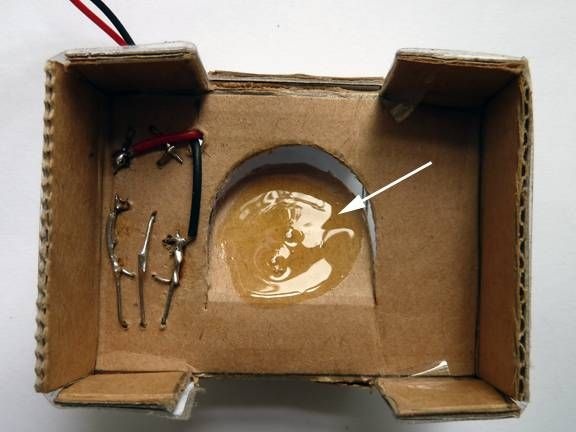
בשלב הבא עליכם להתקין את כל רכיבי הרדיו הדרושים. כדי לעשות זאת, אתה צריך להסתכל ולבצע חורים בקרטון, הם צריכים להיעשות בסימנים עגולים. כדי לתקן את הרכיבים, לאחר ההתקנה, מסקנותיהם צריכות להיות כפופות מעט. אתה יכול גם לראות את הסימן בצורה של מראה על הקרטון, כאן אתה צריך לעשות חור גדול, תיל חשמל יעבור דרכו.
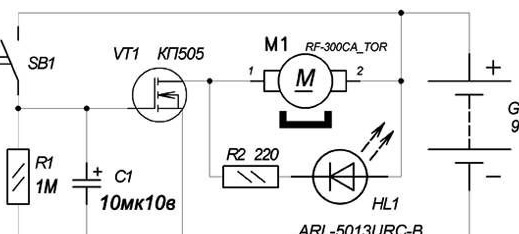
לאחר מכן, אתה יכול לקחת מגהץ ולהתחיל לחבר את המגעים של גורמי הרדיו בהתאם לתכנית.





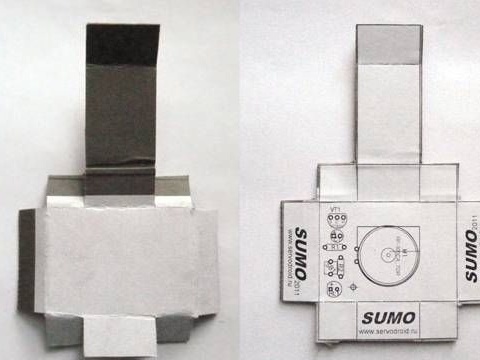
שלב שלישי אנו מקבעים את משטחי הצד התחתון
בשלב זה ניתן לחבר את משטחי הצד התחתון. לשם כך עליכם לכופף את המטוסים התחתונים ואז לתקן אותם עם סרט שקוף. כמו כן בתמונה תוכלו לראות את אלמנטים של התיק מוטים כלפי מעלה, הם נדרשים לתיקון הסוללה.


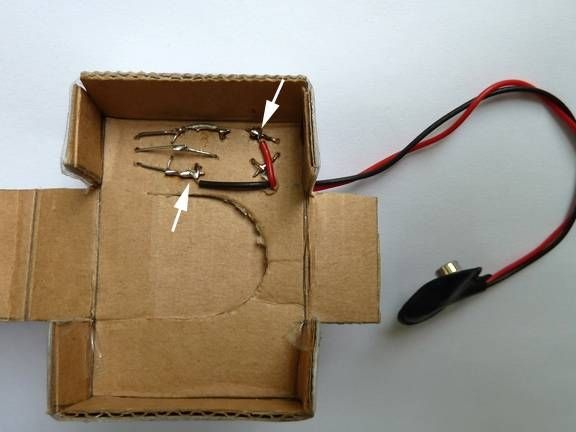
שלב רביעי חבר ציוד היקפי
כדי לחבר חשמל לסוללה, עליך להשתמש במחבר קליפ. יש להעביר את החוט דרך החור, אדום מולחם למגע החיובי של הלד ושחור למינוס של הקבל C1.
אז אתה צריך לחבר את משטחי הצד השמאלי והימני, כתוצאה מכך יש לקבל את האות "P". לצורך קיבוע אמין של האלמנטים משתמשים בסוג מהדק. היכן להתקין את הסוגריים מסומן על ידי חץ לבן. ניתן להדק מלחציים בעזרת צבת.


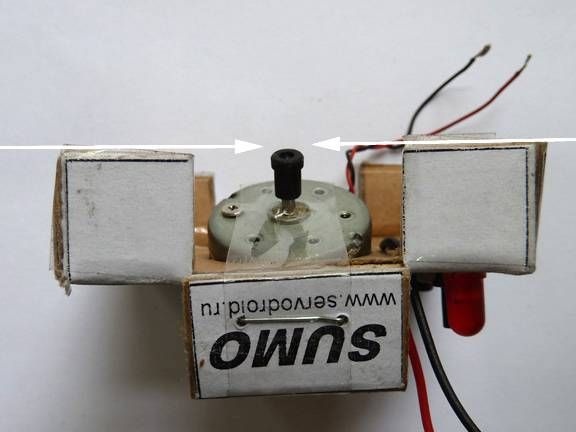
שלב חמישי התקן והחבר את המנוע
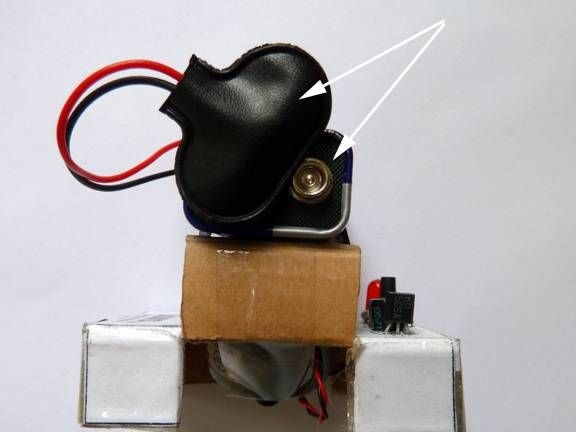
כדי שהרובוט ינוע ישר, המוט שלו חייב להיות בזווית מסוימת לפני השטח. במילים אחרות, הרובוט יעמוד על החלקים הצדדיים, והפיר שלו יהיה רק במגע עם המשטח. על מנת שציר הרובוט יתפוס טוב, אתה צריך להרכיב עליו רצועה אלסטית, זה יכול להיות קמבריק או מיכל גומי בעט עט הליום.
המנוע מורכב על דבק, מקום השימון מסומן בחץ לבן. לאחר החלת הדבק, עליכם לחכות מעט עד שהוא יהפוך צמיגי, אחרת דבק נוזלי יכול להיכנס למנוע ולהרוס אותו.
לקיבוע נוסף, המנוע עטוף בסרט.


באשר לזווית הרובוט, אז כל זה נראה בבירור בתמונות. לאחר ההתקנה, צריך לחבר את המנוע. סיכה אחת מחוברת למינוס, והשנייה לניקוז הטרנזיסטור VT1.


שלב שישי השלב האחרון של ההרכבה
הסוללה מותקנת על מסגרת בצורת U, הסוללה מקובעת באמצעות סרט חשמלי. המסגרת מחושבת בצורה כזו שבנוסף לתמיכה, היא גם בולמת זעזועים לסוללה. אם הרובוט צריך להיות מנותק לחלוטין מאספקת החשמל, אתה יכול לנתק חוט אחד מהסוללה.
ובכן, לסיכום, לתחרות תצטרך טבעת, היא עשויה דו שכבתית, בעובי של לפחות 3 מ"מ. אם לא מתקיים תנאי זה, הרובוט לא יוכל לעצור בקצה הטבעת. קוטר הטבעת צריך להיות 250 מ"מ. השכבה התחתונה מורכבת מקרטון גלי דק, והשני העליון מקרטון שחור דק. יש להדביק את שתי השכבות. ההרכבה הסתיימה, אתה יכול להתחיל בתחרות. המנצח הוא הרובוט שנותר בזירה.