
זה הרובוט נשלט על ידי סמארטפון. מד התאוצה של הסמארטפון מודד את זווית הטלפון שמאלה / ימינה, למעלה / למטה, משתמש בנתונים אלה כדי לחשב את מהירות המנועים הכיוונים, הנתונים מועברים באמצעות Bluetooth אל ארדואינו
מה שאתה צריך כדי לבנות רובוט.
Arduino uno, HC-06 מודול Bluetooth, שני מנועי הילוכים 300 סל"ד 12 וולט, H-bridge L298N בקר מנוע גשר H כפול
12 עד 1.3 סוללת חומצת עופרת. כל מנוע צורך 0.4A בתוספת צריכה של היגיון הנהג. חוטי ארדואינו, סוללות 9 וו רגילות ומחבר לחיבור המצבר לארדואינו. חוטי חשמל לחיבור נהגי מנוע חשמלי. כבל USB. טלפון עם גרסת אנדרואיד 4 ומעלה. 4 גלגלי גומי מסתובבים של 50 מ"מ מבית Screwfix או Toolstation; שני רכזות אוניברסליות HUB-02 של Lynxmotion.










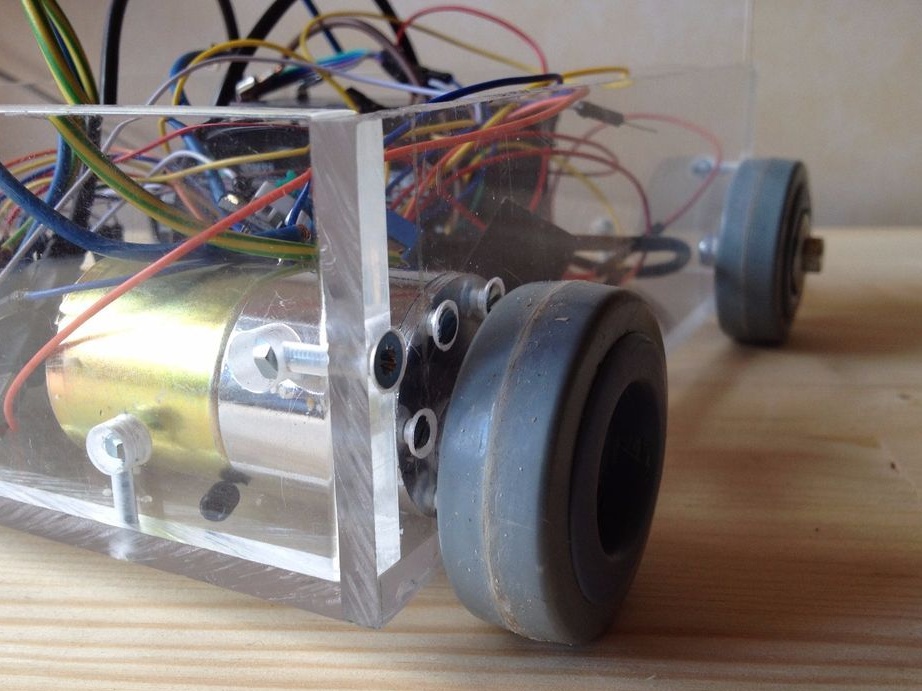
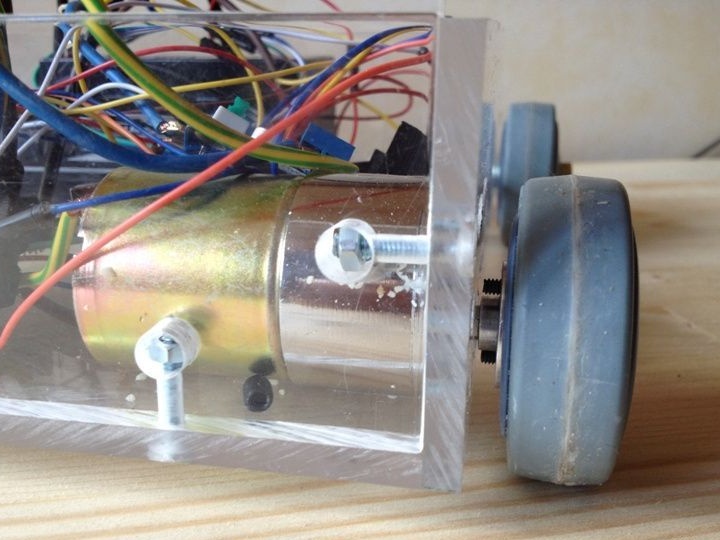
המארז מורכב מפלסטיק באורך 22 ס"מ ורוחבו 17 ס"מ. יש לחבר שני מנועים לפיר ולאבטח באמצעות סיכה הברגה.
גלגלים קדמיים
הגומי מוסר מהגלילים ושוקדחו בהם שני חורים בהתאם לחורים שעל הרכזות. הרכזות מקובעות על הצירים העוברים בבית עם סיכות הברגה. לאחר מכן, הגלגלים קבועים על הרכזות, ומניחים עליהם גומי.
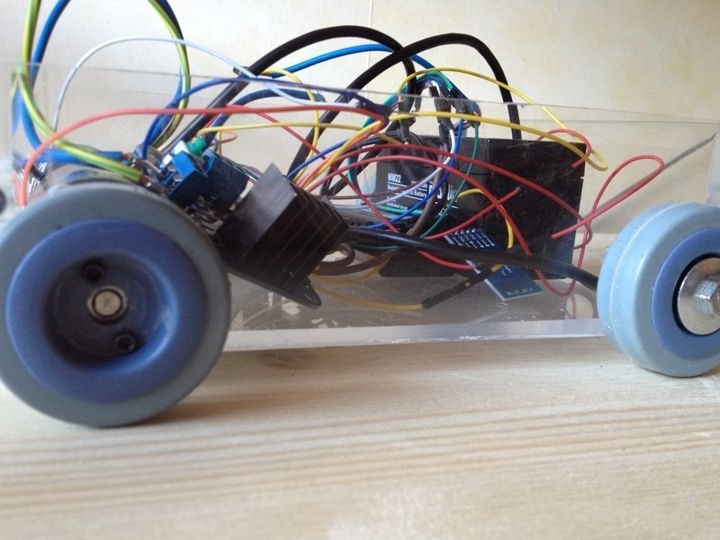
גלגלים אחוריים
הגלגלים האחוריים פשוט מתרחקים מהציר ומאובטחים באמצעות חורים שנקדחו בבית.
חיבורי חשמל.
יהיו בעיות בטעינת קוד התוכנית בארדואינו. זה נובע מהעובדה שמודול ה- Bluetooth, אנשי הקשר שלו RX \ TX, מחוברים לפינים Arduino 1 ו- 2, המשמשים גם להעברת נתונים באמצעות USB. יש צורך לשנות את אנשי הקשר 1 ו -2 ל 11 ו 12 בספריה המחוברת, שתשמש להעברת נתונים.
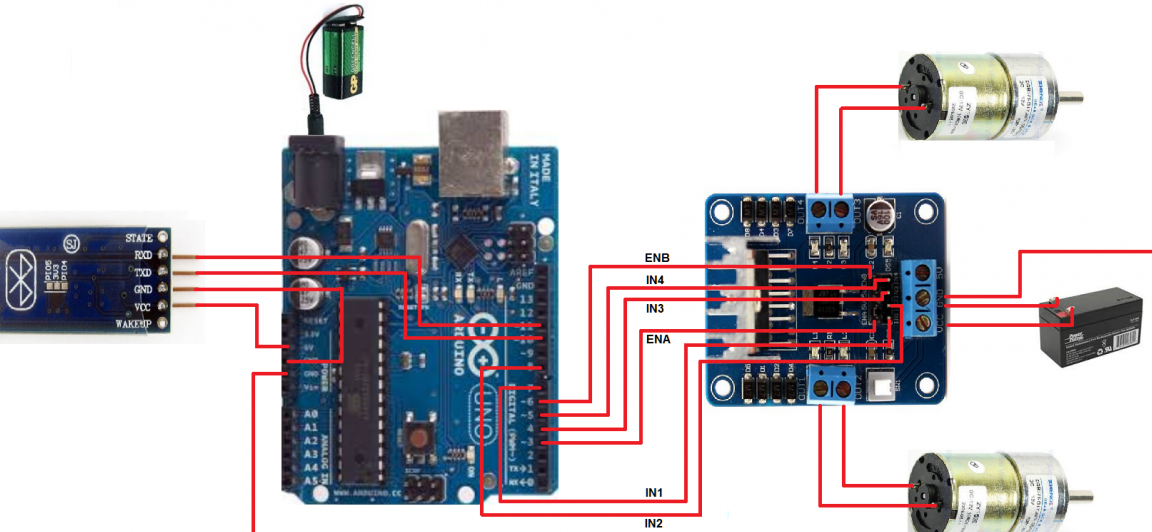
נהג המנוע אינו זקוק לאספקת חשמל נפרדת לצורך ההיגיון. די בספק 12V בכדי להניע את היגיון הנהג ואת המנוע עצמו. המינוס של הסוללה צריך להיות מחובר הן לארדואינו והן עם נהג המנוע. ניתן לקפץ קשרים עם נהגי מנוע ECA / 5V ו- ENB / 5V. יש להסיר אותו לפני שהוא מתחבר לארדואינו. אין לחבר דבר לשני הסיכות של 5V.
קוד אנדרואיד.
יש לפרוק את הקובץ המצורף ולייבא אותו ל- Android Studio, לארוז אותו ב- apk ולהתקין אותו בטלפון.
קבצי מפתח:
פעילות מכשירים מותאמים:
deviceList.java
Activity_device_list.xml
פעילות שליטת LED ותנועה:
ledControl.java
Activity_led_control.xml
מניפסט:
AndroidManifest.xml
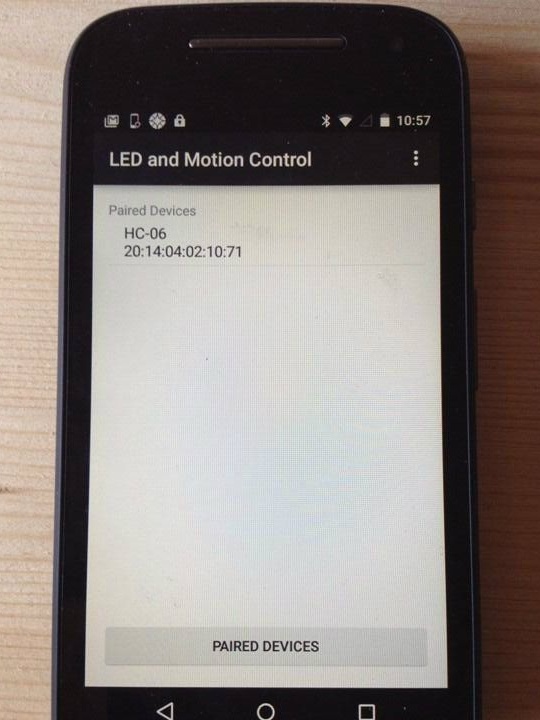
פעילות מכשירים מותאמים מציגה מכשירי Bluetooth זמינים. ברגע שהמכשירים מחוברים, השליטה מועברת לנוריות ולפעילות בקרת תנועה.
כפתורי ההפעלה / כיבוי שולחים הודעת "הפעלה" או "כיבוי" לארדואינו, ומפעילים או כבויים את ה- LED המובנה. מד האצה של הטלפון, המעביר ערכי x / y מהחיישן, בכל פעם שערכים אלה משתנים, שולט בתנועה. בהתבסס על זה, Arduino מחשבת את מהירות וכיוון הסיבוב של המנועים בטווח שבין 0 ל- 255. הוא מעביר את ערכי הארדואינו הללו בצורה של 'L-255:' או 'R100' וכו '. בהתבסס על זה, Arduino שולח את פקודות מהירות הסיבוב של המנוע השמאלי ל- ENA, הימני ל- ENB ומשנה את כיוון הסיבוב על ידי שינוי הקוטביות ל- IN1, IN2 לשמאל, N3 ו- N4 עבור מנועים ימניים.