

ויברובוטים הם כאלה רובוטיםשזזים בגלל רעידות. למרות העובדה שהעיצוב שלהם די פשוט, הם מרשימים לא פחות בעבודה מאשר אחיהם המתוחכמים יותר מבחינה טכנית. רובוט כזה ישתמש בזיפים כמרחיק, זה סוג של רגליו.
הרובוט המתואר במאמר יכול לשנות באופן עצמאי את מסלול התנועה ובאופן עצמו עוקף מכשולים. כניסוי יצר המחבר שני רובוטים עליהם הותקנו מקורות אנרגיה ומנועים שונים. באופן עקרוני, אין תקנים מחמירים לגבי החומרים המשמשים, העיקר לדבוק בתכנית הנתונה בעת הרכבת הרובוט.

חומרים וכלים לייצור:
- קשרי ניילון בגודל 3x150 מ"מ;
- סרט בידוד בצבע שחור;
- סוללת 9 וולט (6F22);
- דיסק לייזר (CD או DVD אין הבדל);
- מעטפת מגן;
- מחבר סוללה 9 וולט;
- אקסצנטרי (למחוק).

תהליך הייצור של הרובוט:
צעד ראשון. צור את בסיס הרובוט
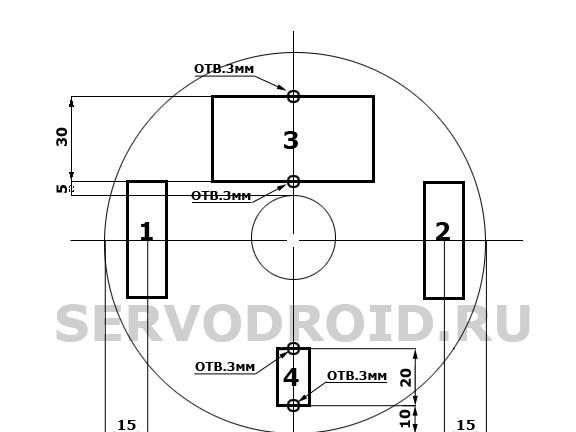
כבסיס לרובוט ישמש תקליטור רגיל של CD או DVD. ערכו בו חורים בבירור לפי התוכנית, המוצגת בתמונה. ללא יוצא מן הכלל, כל החורים נקדחים בעזרת מקדחה 3 מ"מ. די בקוטר זה כשמשמש לחיבור קשרי ניילון. אם החלטתם להשתמש בשיטה אחרת של הידוק, ניתן לקדוח את החורים בכל גודל אחר. השרטוט המוצע מתאים לכל הרכבה של הרובוט.
המספרים 1 ו -2 מציינים את מיקום ההתקנה של המברשות, סוללה מותקנת בכיכר עם המספר 3, ומנוע מותקן בריבוע 4.
שלב שני אנו מייצרים ומתקינים מובילים
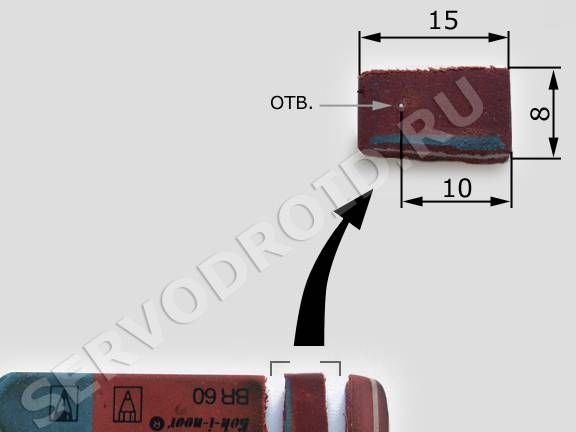
בזכות ההנעה הרובוט יזוז. כדי להפוך אותם אתה צריך לקחת שתי מברשות שיניים. עדיף שהמברשות זהות בגובה וצורת זיפים. אם הצורה שונה, ניתן לתקן אותה עם מספריים.
עכשיו הזיפים צריכים לקבוע את הכיוון. לשם כך נלקח סרט הדבקה והזיפים עטופים באותה צורה כפי שצוין בתצלום. במצב זה יש להחזיק את המברשת כשעה, כך שהזיפים יזכרו בתנוחה זו. בתמונה, החץ האפור מציין את הכיוון אליו נוטים הזיפים.

לאחר הגדרת הצורה הרצויה, עליכם לנתק את החלק עם הזיפים ממברשת השיניים. אז אתה צריך לקחת את אקדח הדבק ולהתקין את הזיפים בדיסק במקומות שצוינו. יש לבצע את כל העבודות במהירות ובמדויק, שכן דבק חם מתקרר במהירות ומתקשה.עליכם לנסות להתקין את המברשות כך שתעמוד במקביל זו לזו.
זיפי המברשות צריכים להיות מופנים לאחור, או במילים אחרות, כלפי הסוללה ב 9 וולט. במהלך הפעולה הרובוט ינוע נגד כיוון הזיפים, כלומר מיקום הסוללה יהיה האחורי של הרובוט.

1 - דיסק, 2 - דבק חם להמיס, 3 - חורים להתקנת המנוע, 4 - חורים להתקנת הסוללה. חיצים לבנים מציינים את כיוון הזיפים.
שלב שלישי עושה אקסצנטרי
כדי להשיג רעידות, יש להניח אקסצנטרי, כלומר חפץ לא מאוזן, על ציר המנוע. המחבר עשה אקסצנטרי של המחק על ידי כריתת חתיכה בגודל מתאים. צור חור במקום המצוין על ידי החץ הלבן. זה לא צריך להיות גדול, מכיוון שהאקסצנטרי יחליק מהפיר המנוע. ניתן להכין אותו עם מחט.
שלב רביעי ייצור כיסוי מגן.
מכיוון שרטט נוצר על ידי המחק המסתובב כדי שהרובוט יעבוד, רצוי להגן על מקום זה מפני חפצים שונים. בנוסף, הגנה כזו תעניק לרובוט מראה מעניין יותר. כיסוי המגן עשוי נייר, המורכב מכמה שכבות. אתה צריך להכין גליל מנייר; גודלו תלוי בגודל המנוע. כדי לתת נוקשות רבה יותר לנייר, ניתן למרוח אותו בדבק ולכן יש למרוח עוד כמה שכבות. או שתוכלו להשתמש בקרטון למטרות אלה.
כדי ליצור צורה גלילית, המנוע פשוט עטוף בנייר מלמעלה.




שלב חמישי הרכבה סופית של הרובוט
המנוע מותקן במקום ספציפי ואז מתקין אותו בעזרת מגהץ ניילון. ניתן לקנות מגרדים כאלה בחנויות המתמחות במכירת חומרי בניין.
הסוללה מחוברת גם מדויקת. חשוב לקחת בחשבון כי הסוללה חייבת להיות מרוכזת בבירור, אחרת מסלול הרובוט עשוי להשתנות. אגב, בדרך זו בעתיד ניתן לקבוע את מסלול התנועה תוצרת בית.


עכשיו בין מחבר הקליפ והמנוע אתה צריך להתקין מתג קטן. לסיכום, נותר לחבר את מחבר הקליפ לסוללה ותוכלו להתחיל לבדוק את הרובוט. חוטים מחוברים על ידי צבע.
עם זאת, בעת שימוש בסוללת Kron, אין צורך להתקין מתג; אתה יכול להפעיל את הרובוט על ידי חיבור המחבר.
ובכן, עבור הגרסה השנייה של הרובוט, תוכלו פשוט להסיר את הסוללה מהמכשיר, אך כמובן שהמתג מבטיח יותר.
זה הכל, הרובוט מוכן, אתה יכול להתחיל לבדוק. כדי להשיג את התוצאה הרצויה, תוכלו לנסות לשנות את הקוטביות, כך שהמנוע יסתובב בכיוון ההפוך, והרובוט יתנהג אחרת.