


ראשית, בואו נבין את ההבדל בין האוקטוקופטר לרבע-המסוק. בנוסף לשם, זהו גם מספר המנועים על הפסים. כלומר quadrocopter - ארבעה מנועים, octocopter - שמונה. זה נכון גם לגבי ה- Hexacopter - שישה, טריקופטר - שלושה וכו '. אם המדריכים, למשל, הם ארבעה (X) ושמונה מנועים, זה עדיין אוקטוקופטר, אך מכונה X8. כלומר על ארבע מסילות, שמונה מנועים.
בעיקרון, מספרים עם קידומת למסוקנים הם כלי טיס הנשלטים על ידי אות הרדיו של המפעיל מהקרקע. סטודנט מהודו החליט להמשיך רחוק ולעשות אוקטוקופטר שמסוגל להעלות אדם לאוויר. זה לא פרויקט זול. המימון השתלט על ידי המוסד החינוכי.
כלים וחומרים:
- מנועי Turnigy CA170 מנועים - 8 יח ';
- בקר Turnigy Fatboy 300A - 4 יח ';
- בקר 200 HV Turnigy - 4 יחידות;
- משדר Hitech XG11 Tx / Rx;
-בקר DJI A3 Pro קל;
בקר בקר DJI Naza M V2;
- סוללה זיפי 22.2V 5Ah 40C LiPo - 16 יח ';
- מטען 6s LiPo מטען;
מחברים -XT150 - 50 יח ';
-Wire 8AWG סיליקון חוט - 10 מטר;
סרווס;
-Ball לנגינת דלעת (כדורי דלעת) - 4 יח ';
- גיליון MDF 25 ס"מ x 50 ס"מ x 2 מ"מ;
- תרגיל;
- מטחנת זווית;
- מברגים;
- ברגים;
- צבת;
-חותך לייזר או מסור להקה;
מבחר אגוזים 4 מ"מ, 6 מ"מ ו 8 מ"מ, ברגים וכביסות;
-ברנר;
-LED LED;
אביזרי הלחמה;
- חוט פלדה 2 ו -3 מ"מ;
-בורג בורג 100 מ"מ -200 מ"מ - 40 יח ';
- 40 ווים וברגי עיניים;
-Tometer מד סל"ד סל"ד;
מנתח כוח (Turnigy Wattmeter / Ampmeter);
בקר בקר;
- צינורות פרופיל אלומיניום;
צלחת אלומיניום;
- קלטת דו צדדית;
-מכונת ריתוך;
-רולטה;
מחשב עם פיוז'ן 360;
- סוללה 11.1 V 2200 mAh LiPo 30C;
-בד צפוף 1.2 מ '1.2 מ';
- חוט חזק ומחט;
בטיחות חגורה;
שלב ראשון: עיצוב
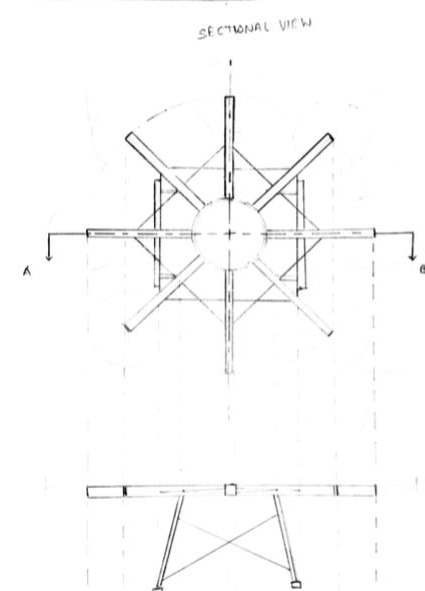
בעת פיתוח אוקטוקופטר מאויש, המאסטר שקל אפשרויות תצורה שונות, ו- X8 ו- H, ו- T, אך הגיע למסקנה כי האופטימלי ביותר, מסיבות שונות, יהיה עיצוב האוקטוקופטר, על פי התכנון המסורתי.
אז היה צורך לגלות מה גודל האוקטוקופטר צריך להיות. החישובים נעשו באמצעות דגמי CAD על פיוז'ן 360 כדוגמה, הברגים הקיימים נלקחו בחשבון בחישובים. האופטימלי התגלה כקוטר של שלושה מטרים, גובה של מטר. סל פנימי, לאדם 55x55 ס"מ.

שלב שני: עגלת קניות
המסגרת הייתה מרותכת מפרופיל מרובע מאלומיניום עם מדף של 50 מ"מ ועובי קיר של 2 מ"מ.
הפרופיל נחתך וריתוך. התפרים מנקים.



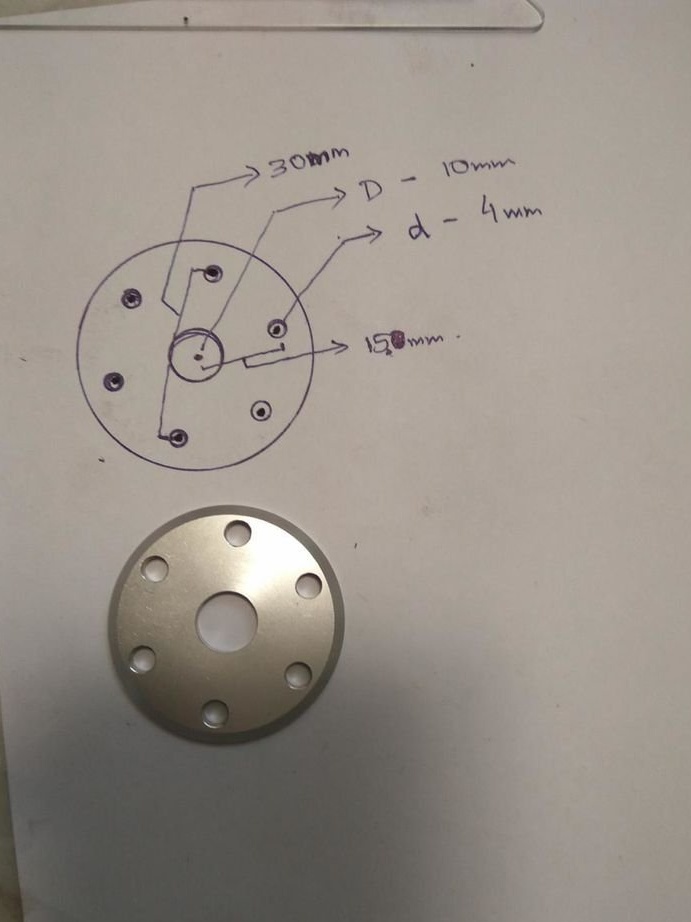
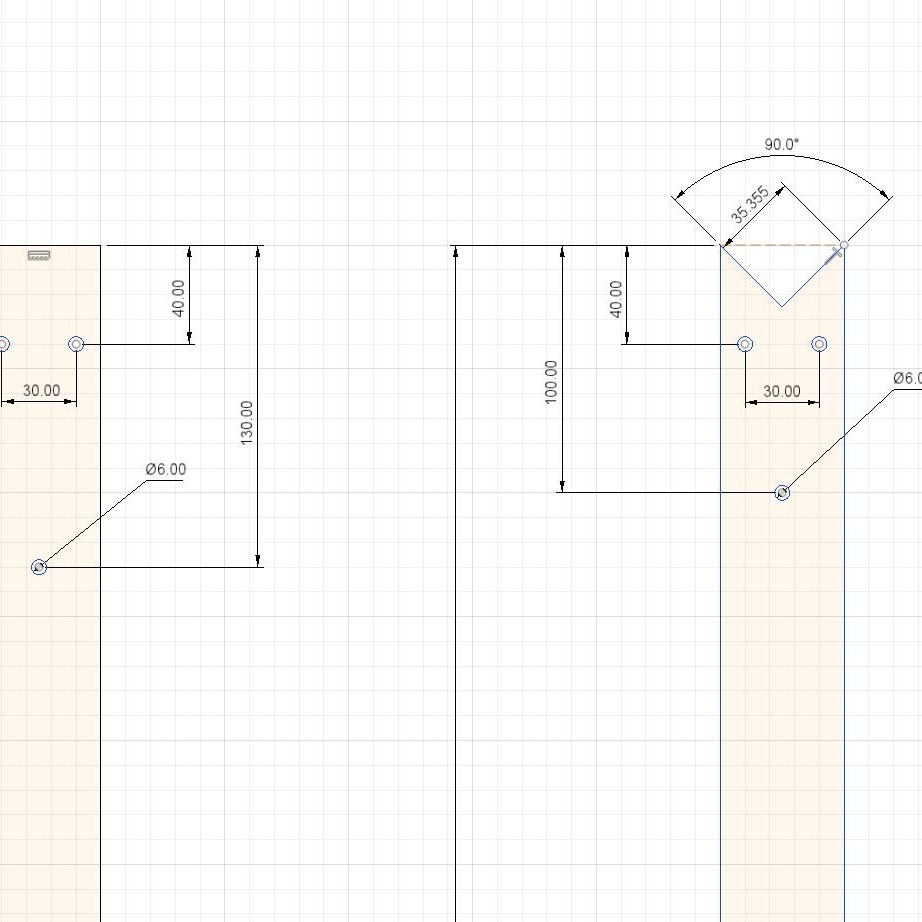
שלב שלישי: הרכבת צלחות
עבור סוגריים, המאסטר השתמש בפלטות אלומיניום בגודל 1.5 מ"מ. ישנם שמונה סוגריים בסך הכל, ארבעה בפינות, וארבעה במרכז המסגרת. אורך כתף הזרוע והחלק התומך 15 ס"מ כל אחד. הסוגריים תוכננו ב- Fusion 360. הלוחות נחתכו בעזרת חותך כרסום. נקדח בהם חורי הרכבה. ואז הסוגר סוגר את המסגרת.






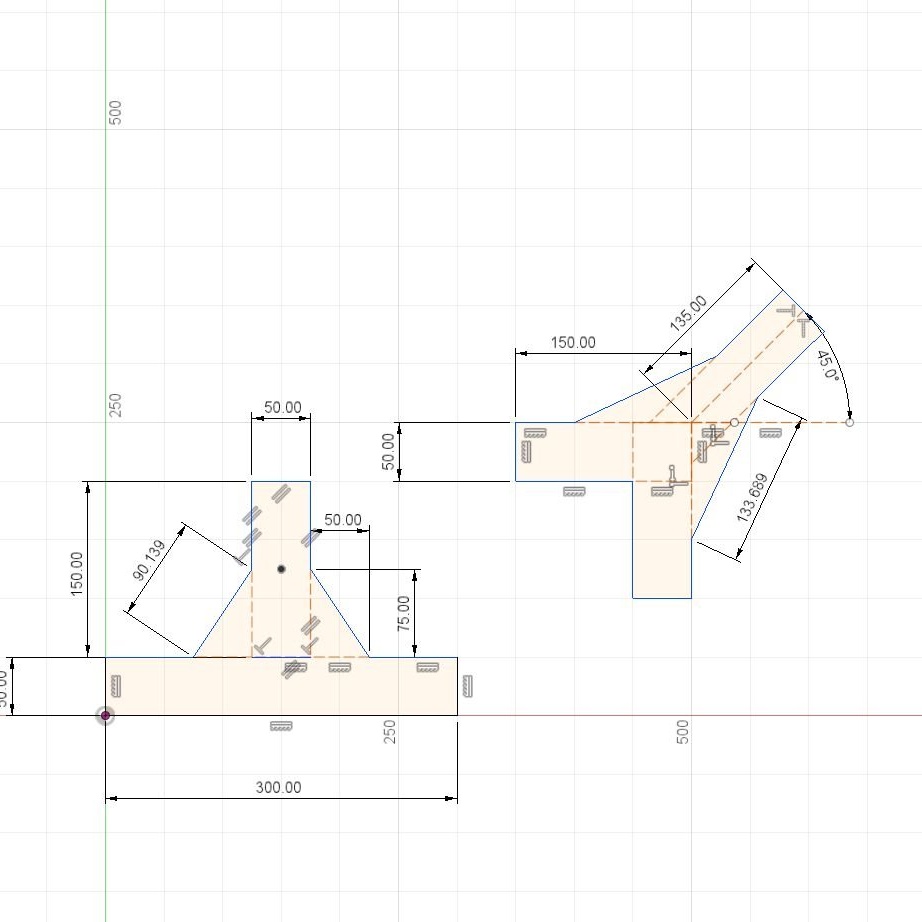
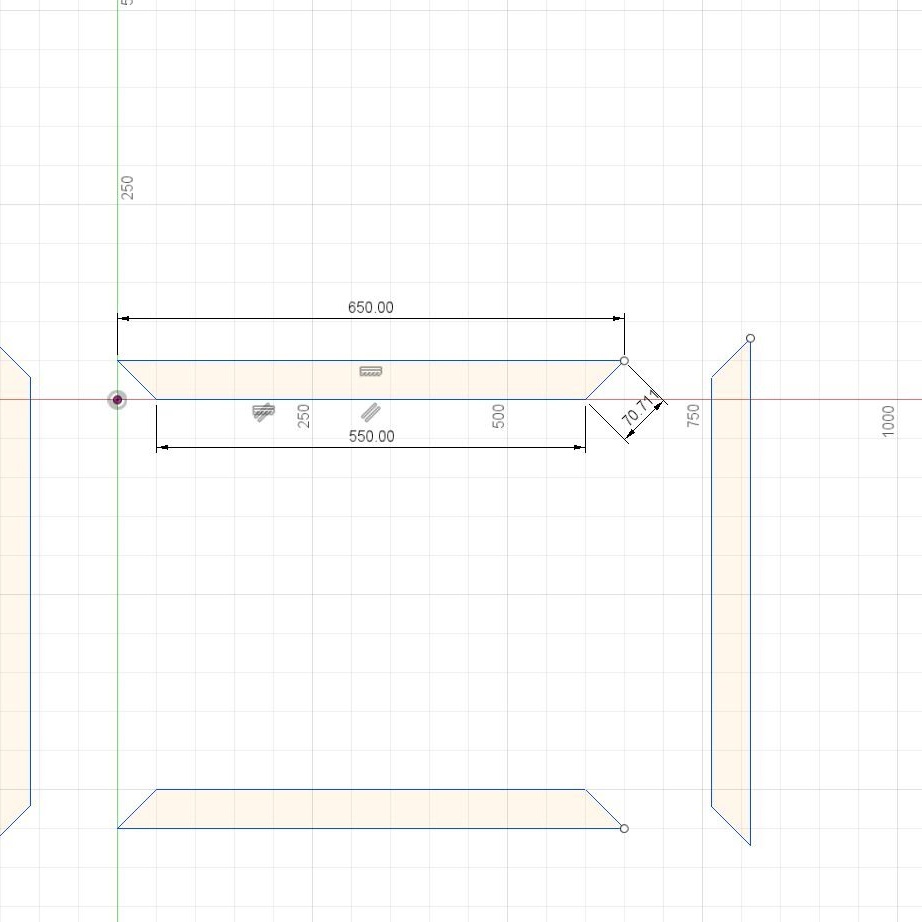
שלב רביעי: פרופיל ספק
פרופילים אלה מחוברים לסוגריים והמנועים מותקנים בקצותיהם. הפרופילים הם מרובעים, 50X50 ס"מ, ואורכים שונים. באורך הפינות מחוברים פרופילים 112.5 ס"מ. פרופיל 125 ס"מ מחובר לדפנות. מגזרת מבוצעת בפרופילים זוויתיים בזווית של 45 מעלות. זה הכרחי שפני הקצה שלו צמודים למישור הזווית.
כדי לתקן את הפרופילים לסוגריים, המאסטר מקדח חורים לברגים.




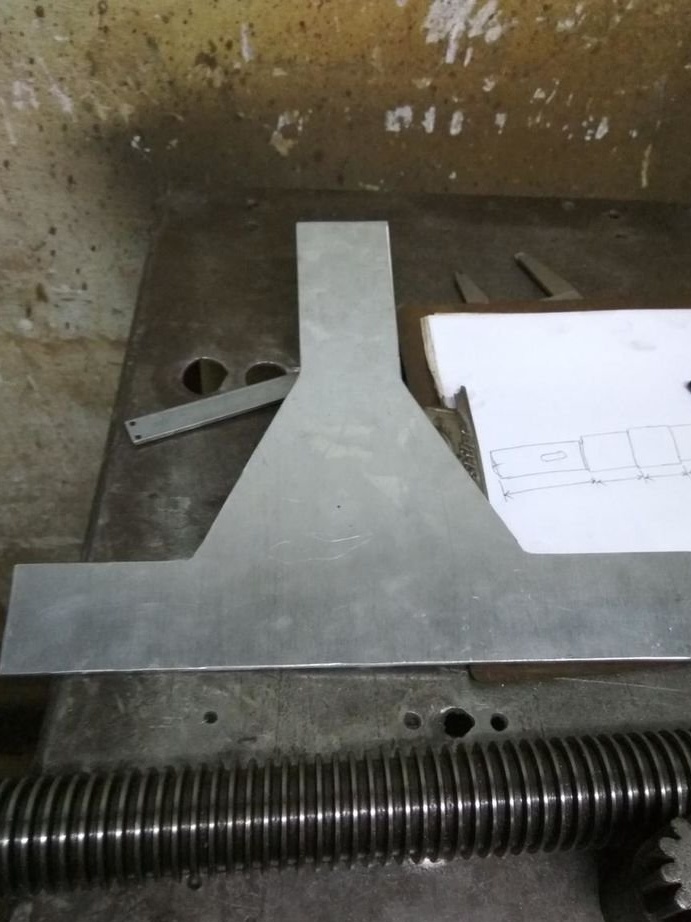
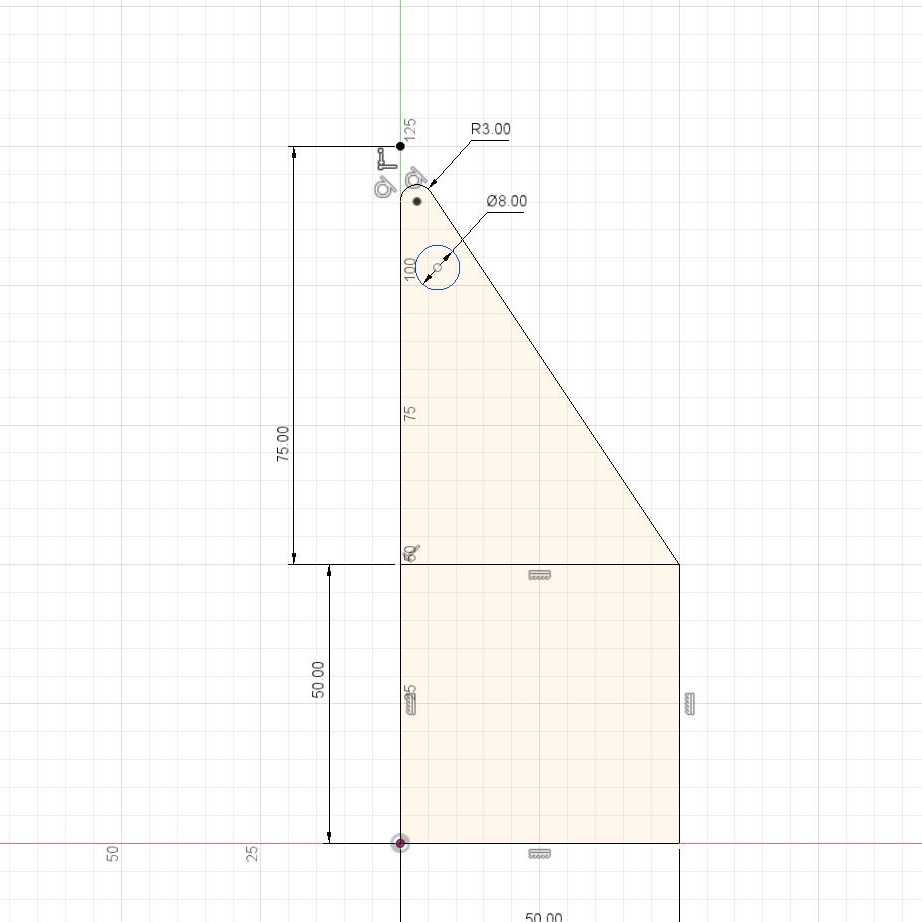
שלב חמישי: הר המנוע
מנועים דופקים על צלחת ריבועית מאלומיניום. מתחתית הלוח, במקביל זו לזו, מוברגות שתי פינות. המרחק ביניהם שווה לרוחב הפרופיל. יתר על כן, הלוח עם המנוע מותקן על הפרופיל, חורי ההרכבה נקדחים והכול מעוות עם ברגים.





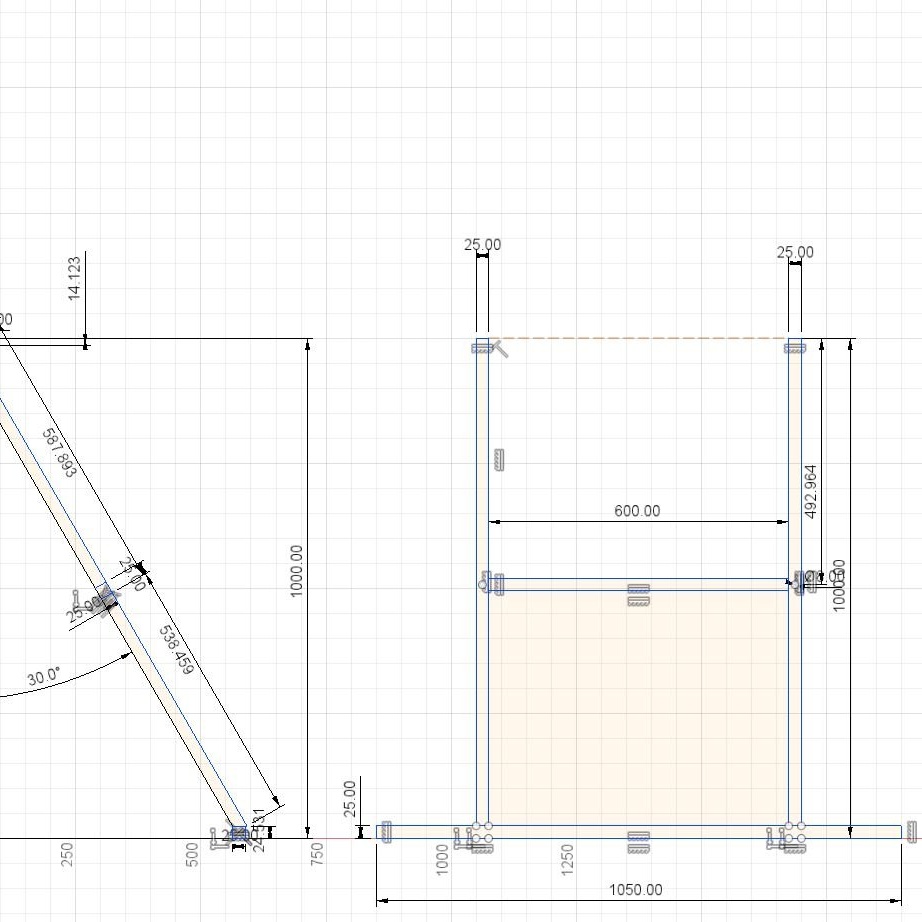
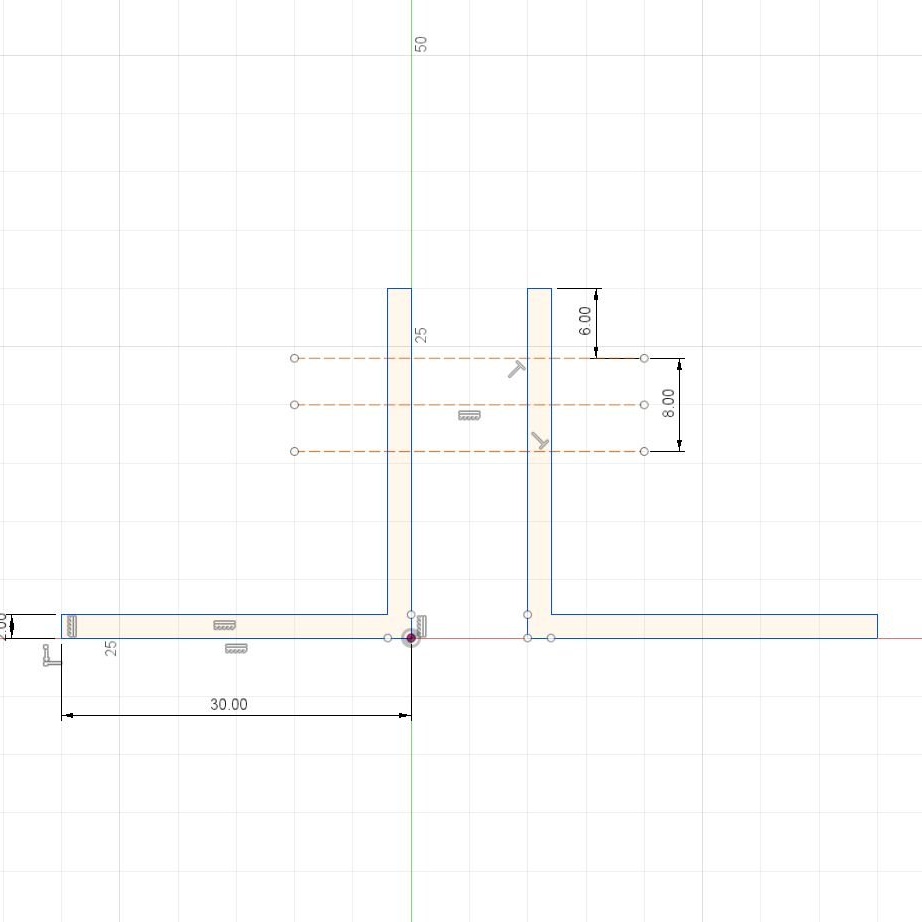
שלב שישי: שלדה
השלדה הייתה עשויה מפרופילי אלומיניום 25X25 מ"מ ועובי 3 מ"מ. כל החלקים מולחו, וניתן לראות בגדליהם בתצלום. הרעיון היה להעלות את המרכב מהסלסל בזווית של 30 מעלות. כדי למנוע נזק לשלדה, נמשכים כבלים תומכים ביניהם.


שלב שביעי: תמיכה בפרופילי תמיכה
לאחר התקנת המנועים החלו הפרופילים התומכים להתכופף. ואז המאסטר ניסה להפעיל את המנוע, וגילה שהפרופילים "הולכים". היה צורך לחזק את העיצוב.
הוספת צלחות תוסיף משקל רב מדי למבנה. ואז החליט המאסטר לעשות עיצוב בצורת V מהסלסל למטה. לחבלים צמודים לחלקו התחתון. הקצוות האחרים של הכבלים מחוברים לסוגריים במרכז הפרופילים התומכים. הכבלים נמשכים עם מנוף. כך, המבנה הופך לקשיח.















שלב שמונה: התחבר
ראשית, המאסטר מכר את המחברים לקצוות החוטים.


ואז מתחיל ההתקנה. היה צריך לבדוק כל מנוע לגבי כיוון הסיבוב. במידת הצורך, קל לשנות את כיוון הסיבוב של המנוע, ובהתאם, את הבורג, ומחליף שניים משלושת החוטים המגיעים מ- ESC למנוע. לאחר שכל המנועים חוברו נכון, האשף ביצע את ההתקנה על פי תרשים החיבור של היצרן.
בקרי הטיסה IMU DJI A3 רגישים מאוד להפרעות ממתכות, והמאסטר לא הצליח להגדיר את המערכת עקב הפרעות. כתוצאה מכך החליף המאסטר את A3 בנאזה M V2, שהייתה לו תוכנית חיבור דומה. Naza M V2 עבד בצורה אמינה מאוד.
ואז האשף מחבר את הסוללות. בכל פרופיל מנשא, שתי סוללות 22.2 וולט מחוברות בסדרה.



שלב תשע: מושב טייס
המושב היה תפור מבד עמיד. כמו כן, חגורת בטיחות מחוברת לטייס המחובר למסגרת וקסדה.






שלב עשר: טיסה ראשונה
לפני טיסת הטייס באוקטוקופטר, בוצעו מספר בדיקות עם שק חול, ואז עם דגם של אדם. במהלך הטיסה, מדומים מצבים שונים מאובדן שליטה ועד משב רוח.
לאחר כל הבדיקות, הטייס סוף סוף טס לאוויר.






לפני טיסה, עליך לבצע את הפעולות הבאות.
בדוק את אטימות הברגים, הכבלים, הרכבת המנוע.
בדוק את החיווט.
בדוק שהברגים מסתובבים בקלות.
וודא שכל ESCs אינם מוגדרים.
וודא כי כל הסוללות מחוברות ומטענות היטב.
חבר כוח לבקר הטיסה לאתחול וכיול.
לאחר התחברות ל- GPS, הוא יעבור למצב אוטומטי לחלוטין (Alt. + Att. Hold).
שב במושב הטייס והתכופף.
חבר את כל הסוללות ל- ESC.
חבר את שתי הסוללות בסדרה (ESC-RB-RB-ESC) באמצעות נגן בכדי לחסל את הניצוץ.
הפעל את המנועים על ידי סיבוב המתג למצב פועל.
השתמש בבקר כדי לשלוט באוקטוקופטר.