

אוהבי יום טוב של ארדואינו! באינטרנט ראיתי רובוט די מעניין ומרהיב (או מכשיר, תקראו לזה מה שאתם רוצים) ש”מנגן ”את משחק ה- Stak, תוך שימוש באותם עקרונות הפעלה תוכלו להכין רובוט שיכול לשחק משחקים כמו מקף גיאומטריה, פסנתר, ואחרים שבהם אתם פשוט צריכים הציצו למסך ברצף מסוים. מה עשיתי, אנא הערך בסקר שלהלן.
אם מישהו מעוניין, הנה סרטון וידאו של עבודתו של הרובוט הזה:
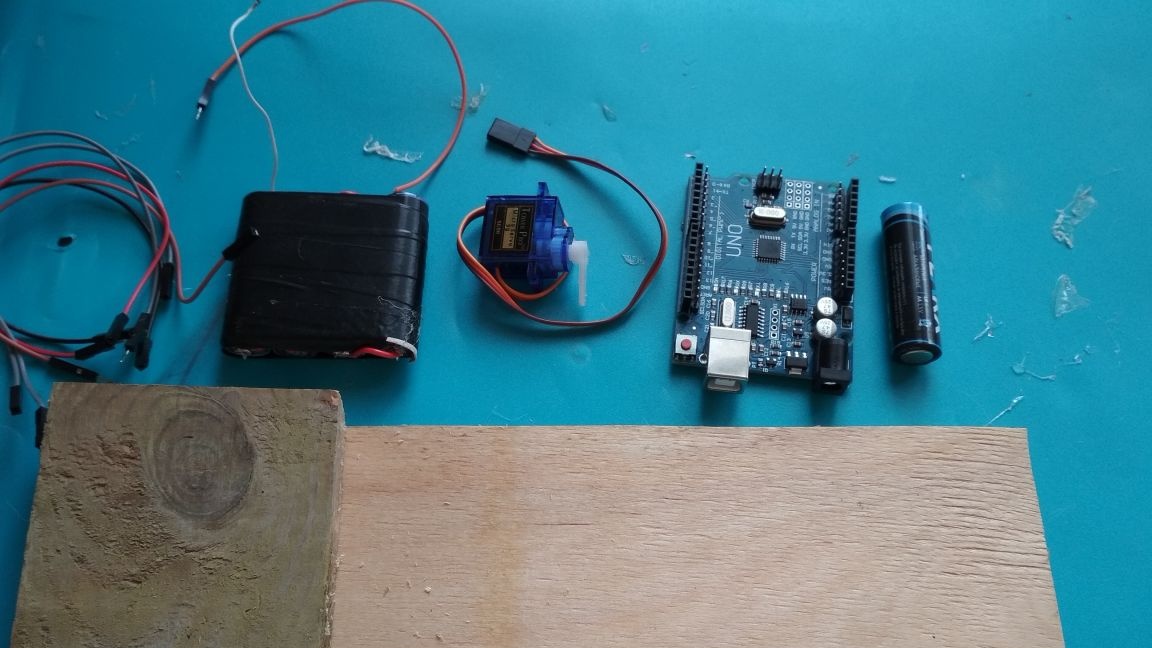
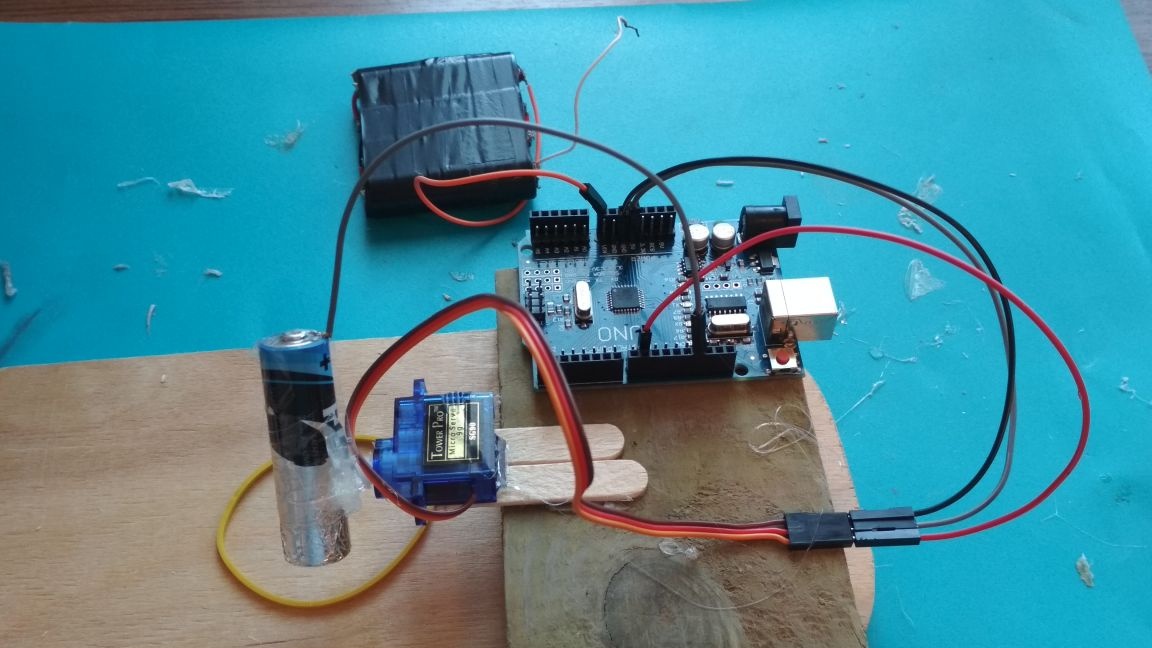
וכך עבור "הרובוט" הזה אנו זקוקים:
תשלום ארדואינו אונו
- חיבור חוטים כמו "אב-אם" או "אב-אב"
שירות
- חתיכת דיקט
- פיסת לוח בעובי של כ 1 ס"מ. העיקר הוא שפעמיים עבה יותר מדיקט
מקל גלידה
חרט
נייר כסף (אם אין חרט)
-סבר (אם אין חרט)
- ספק כוח ל 6-12 וולט (אני משתמש ב -4 סוללות אצבע המחוברות בסדרה)
מהכלים הדרושים לנו:
מספריים
דבק תרמי
וכך הדבר הראשון שצריך לעשות הוא לחתוך חתיכה גדולה כפליים מהטלפון שלך מחתיכת דיקט, אתה יכול לגדול יותר, וצריך לחתוך חתיכה בגודל הטלפון מהלוח (הכנתי מידות שונות במקצת, אבל זה לא קריטי בכלל). לאחר מכן אנו מדביקים את החסר שלנו כמוצג בתמונה:

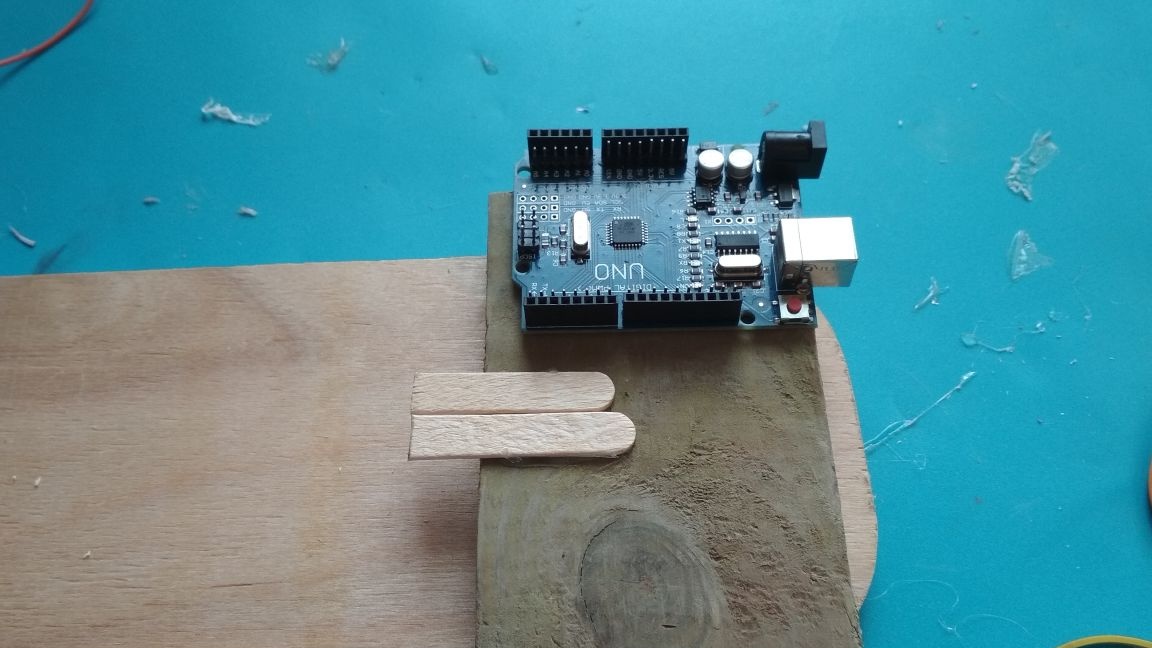
קחו את מקל הגלידה וחתכו אותו לחצי:

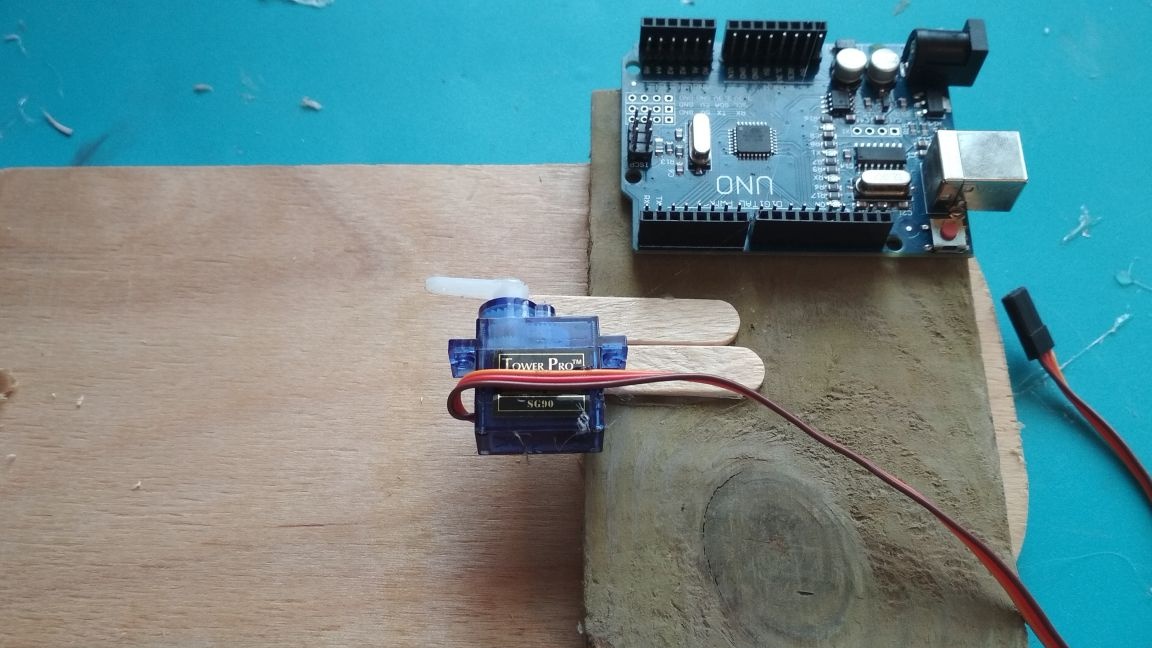
הדביקו אותם במרכז הלוח, מצידו של דיקט, כפי שמוצג בתמונה:

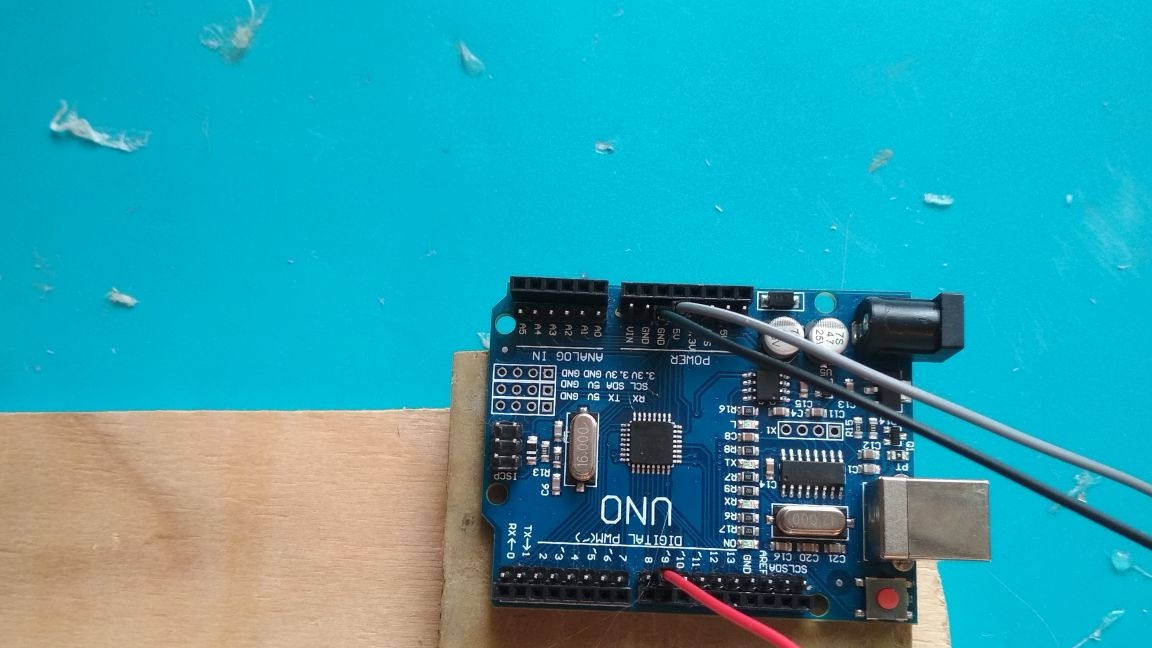
אנו מדביקים את לוח Ardino Uno מקצה הלוח:
אנו לוקחים את ה servomotor ומדביקים את החוטים כך שהם לא יפריעו:
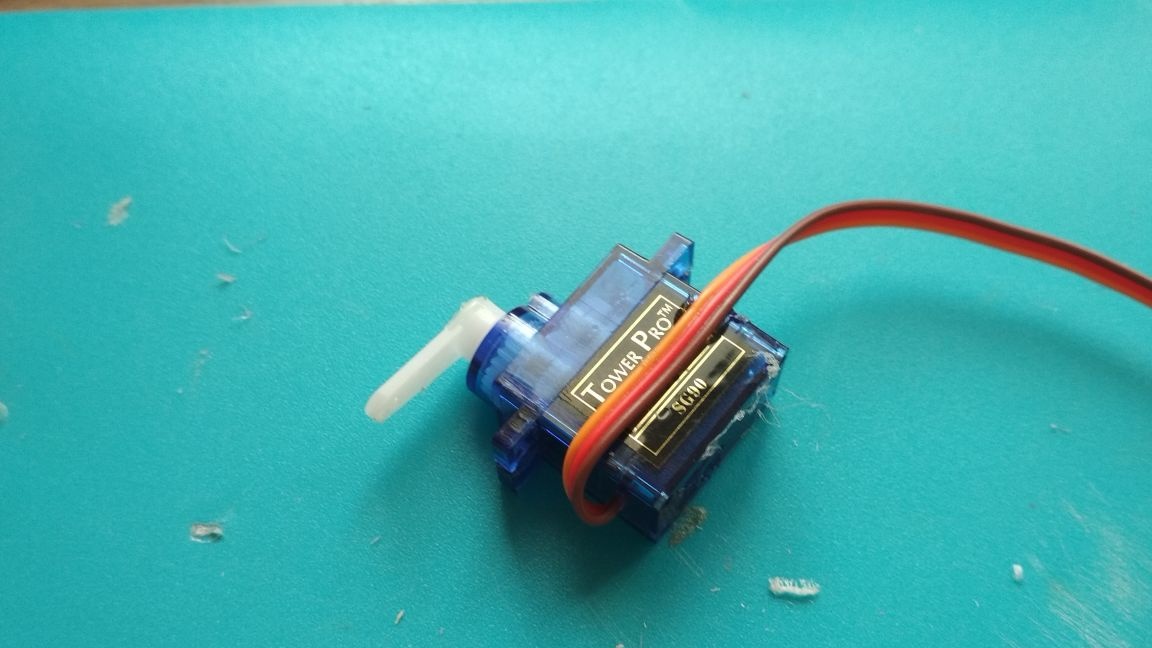
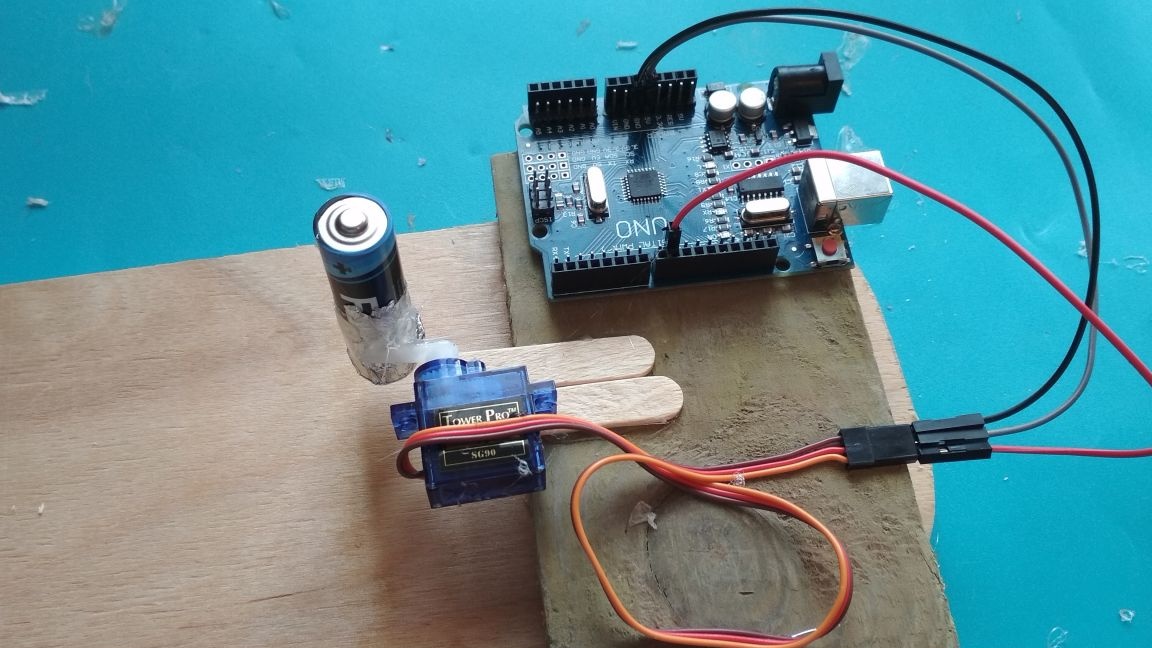
הדביקו את סרוו המוטורוס לקצה חצאי מקלות הגלידה:
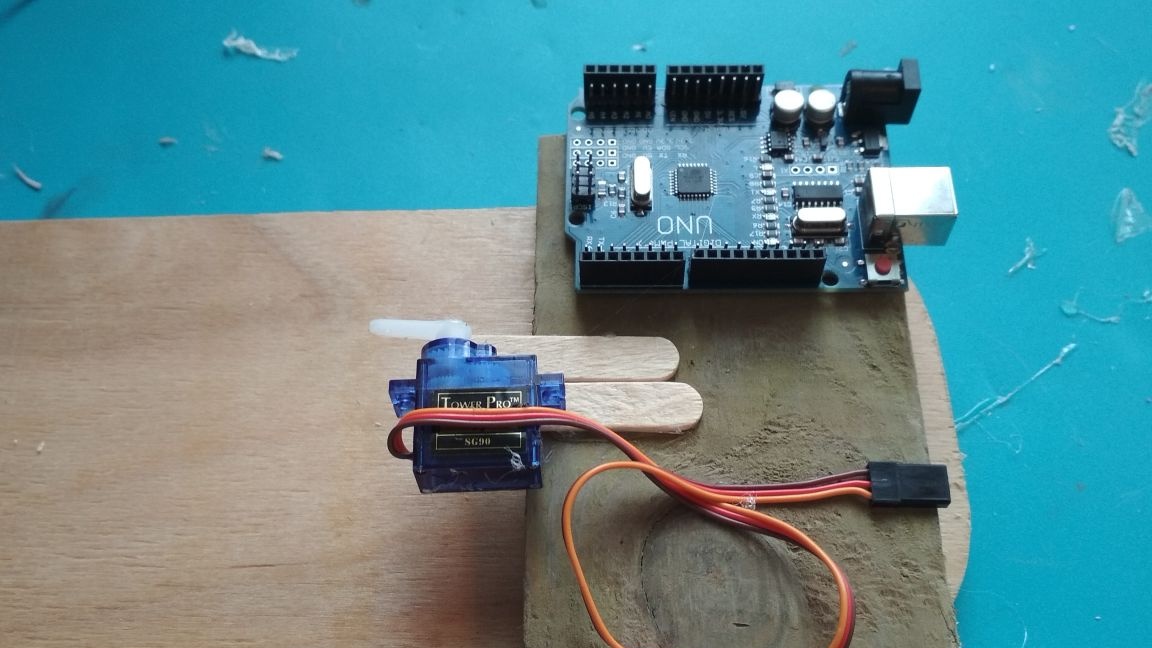
אנו מניחים את החוטים ומדביקים את תפוקת מנוע הסרוו לקצה הלוח:
הוסף 3 חוטי אבא-אמא, רצוי בצבעים שונים, כדי לא להתבלבל
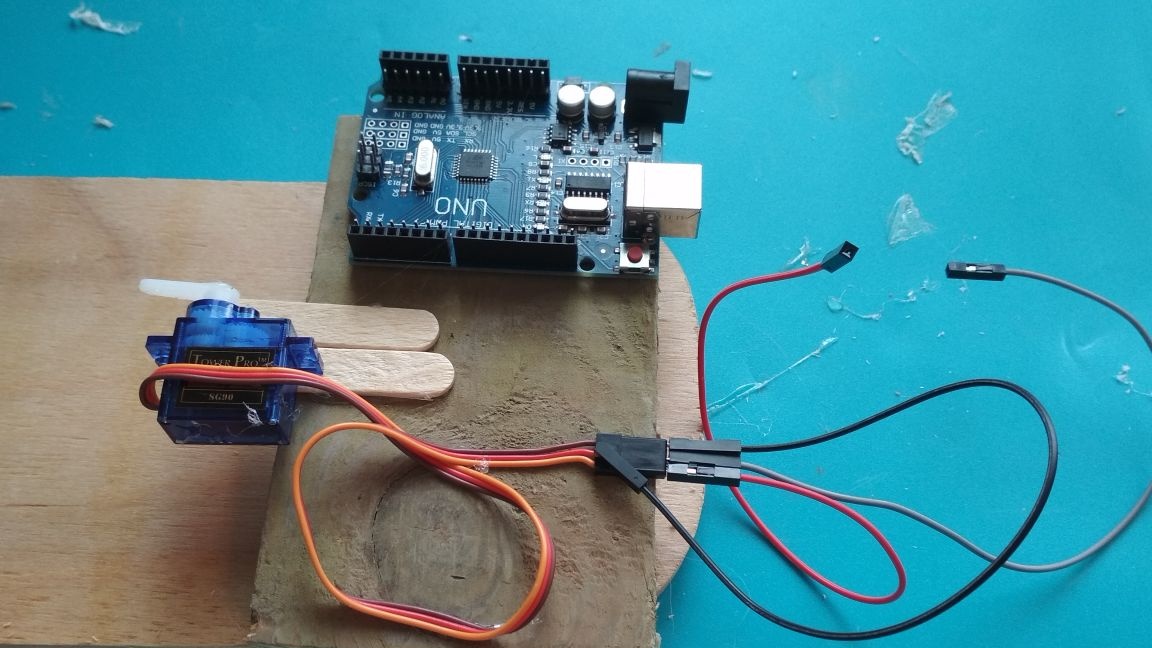
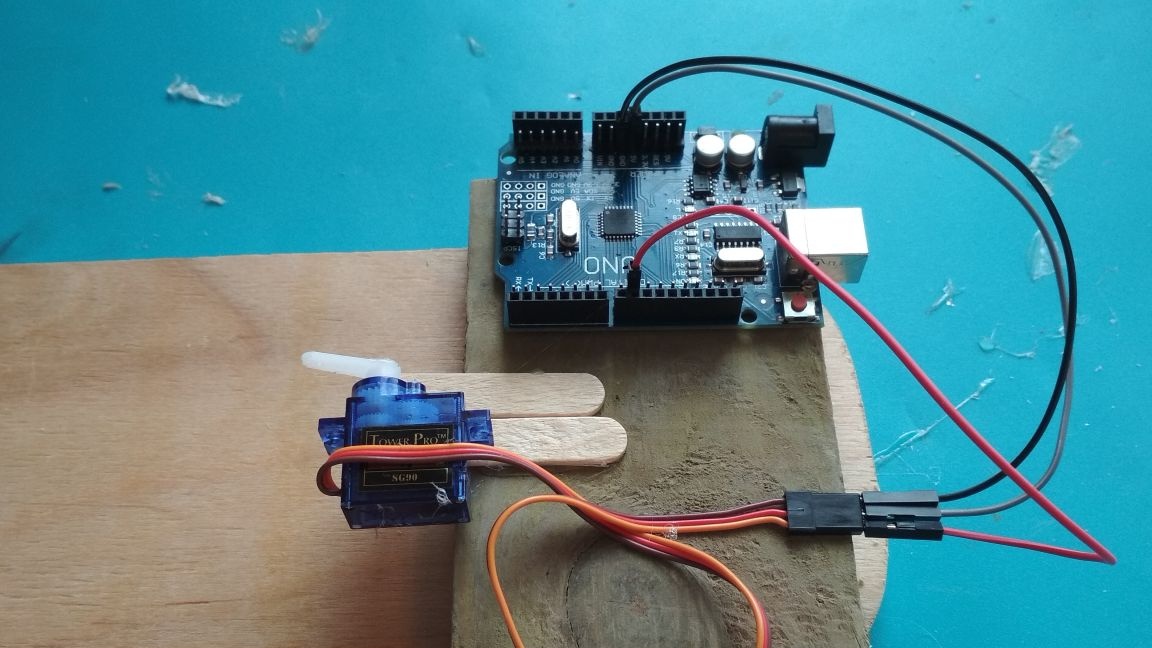
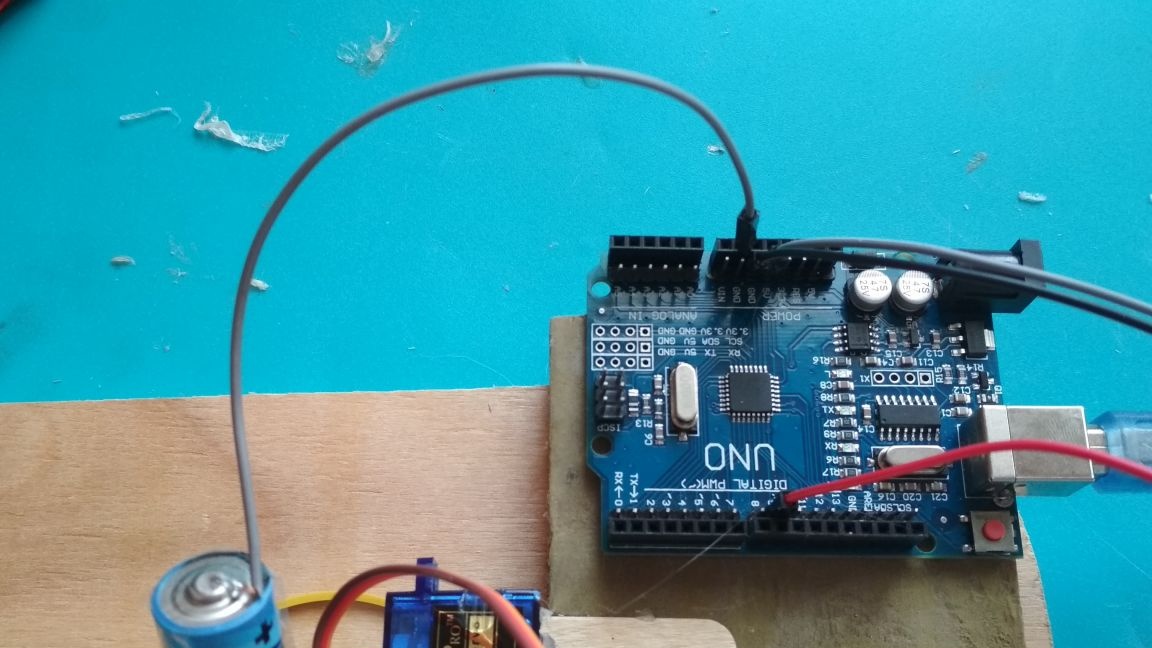
אנו מחברים את כונן הסרוו ללוח Arduino באופן הבא:
חוט חום ל- gnd
חוט קדמי ל 5 v
- חוט כתום ל- 9 "סיכה דיגיטלית"
אם אין לך חרט, כמו שלי, אז אל תתייאש, זה מאוד פשוט לעשות.
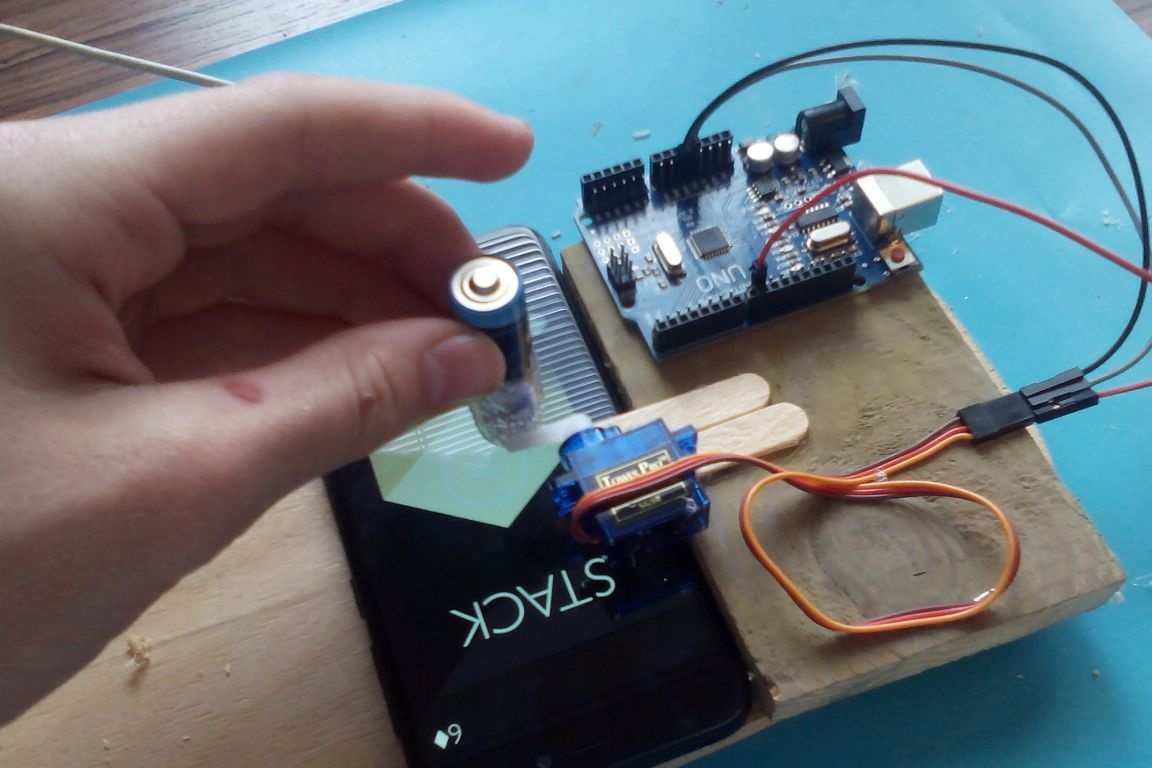
אנו לוקחים סוללת אצבע רגילה ואת הצד השלילי בצורה הדוקה ככל האפשר, עוטפים אותה בנייר כסף ואז אנו מדביקים אותה בחוזקה מאוד:

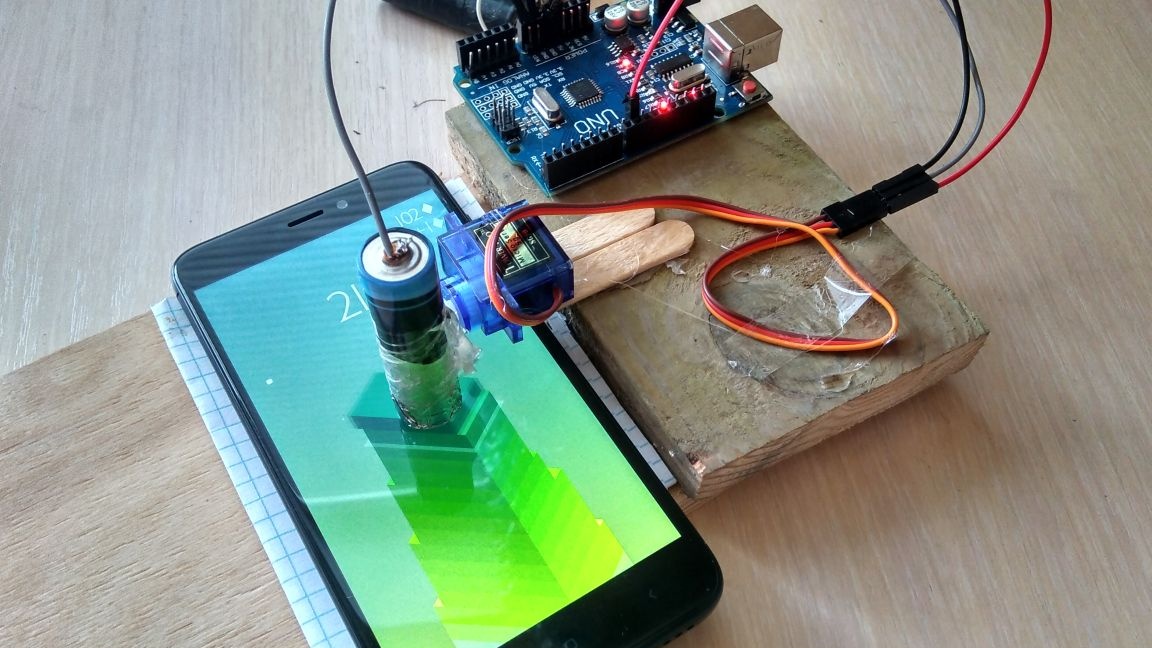
עכשיו אתה צריך לשים את הטלפון על דיקט מתחת ל servomotor, לחבר את הסוללה מלמעלה ולשים לב באיזו רמה נדביק את "החרט" שלנו. לאחר שציינו הכל, הדביקו היטב את ה"סטיילוס "למנוף של ה servomotor, אך ורק בזווית של 90 מעלות (אותה זווית צריכה להיות כאשר מחילים את ה"סטיילוס" לטלפון כשמדדנו אותו). הכל צריך להסתדר כפי שמוצג בתמונה:

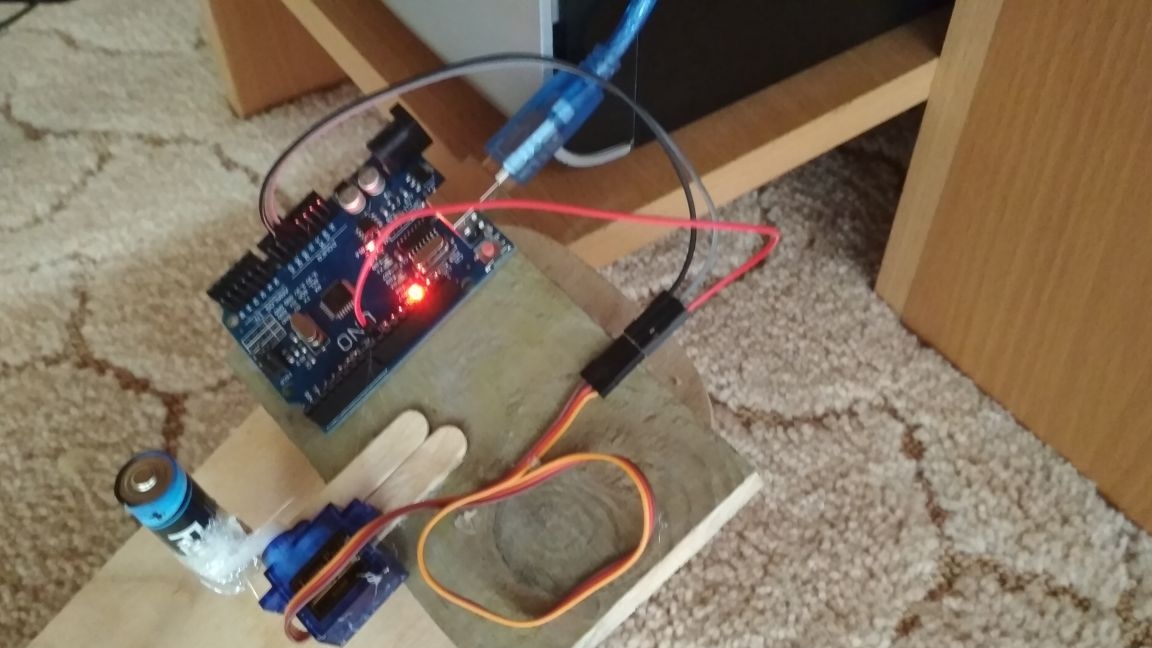
כעת אנו מחברים את "הרובוט" שלנו למחשב דרך היציאה המוגדרת ב- IDE של Arduino, מפעילים את ה- Arduino IDE שקודם לכן, ומעתיקים את הסקיצה למטה, ואז לחץ על כפתור "הורד". אם הכל נעשה כראוי, הסקיצה תיטען ללא שגיאות ואחרי מספר שניות הסרמו-מוטור יתחיל בעבודתו. אם יש לך הבדלים משמעותיים בגדלים של חרט ו servomotor, אז עשה את הסקיצה הזו בעצמך, זה די פשוט.
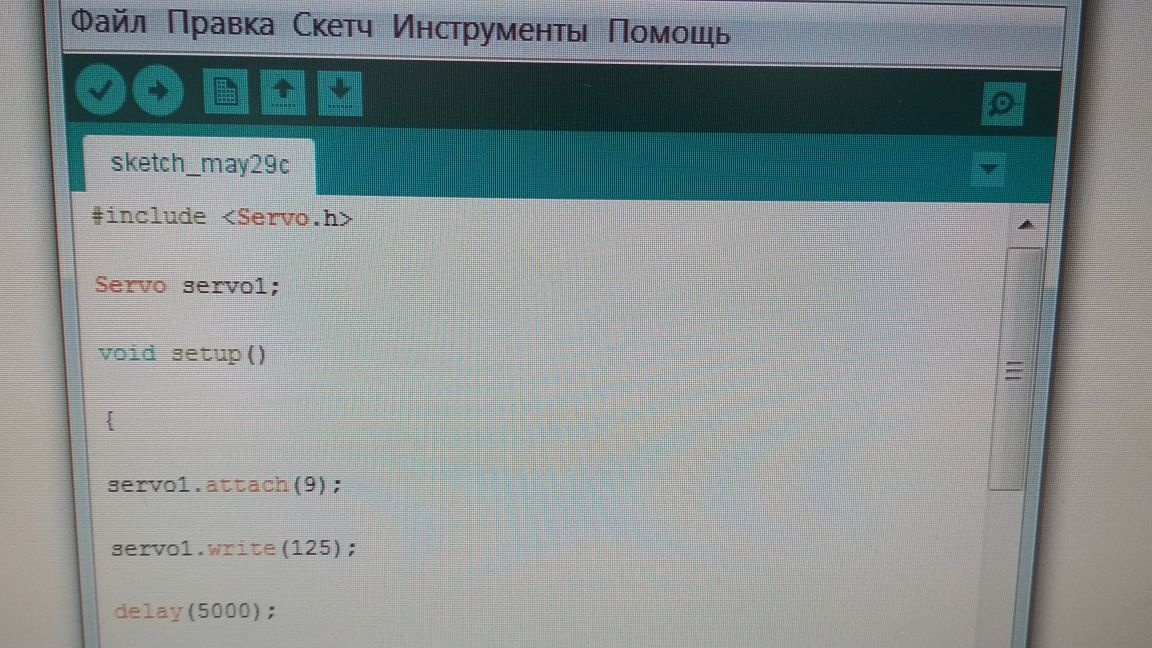
להלן סקיצה:
# כלול
סרוו סרוו 1;
הגדרת ביטול ()
{
servo1.attach (9);
servo1.write (125);
עיכוב (5000);
servo1.write (90);
עיכוב (200);
servo1.write (125);
עיכוב (750);
}
לולאה חלילה ()
{
servo1.write (90); // 1
עיכוב (200);
servo1.write (125);
עיכוב (600);
}בעזרת סרט דבק או קלטת חשמל אנו משבצים את הצד החשוף של חוט מסוג "אם לאם" עם פלט "אם" חתוך לצד הפלוס של ה"סטייל "שלנו ומוצא חוט זה ל- Gnd על ארדואינו:
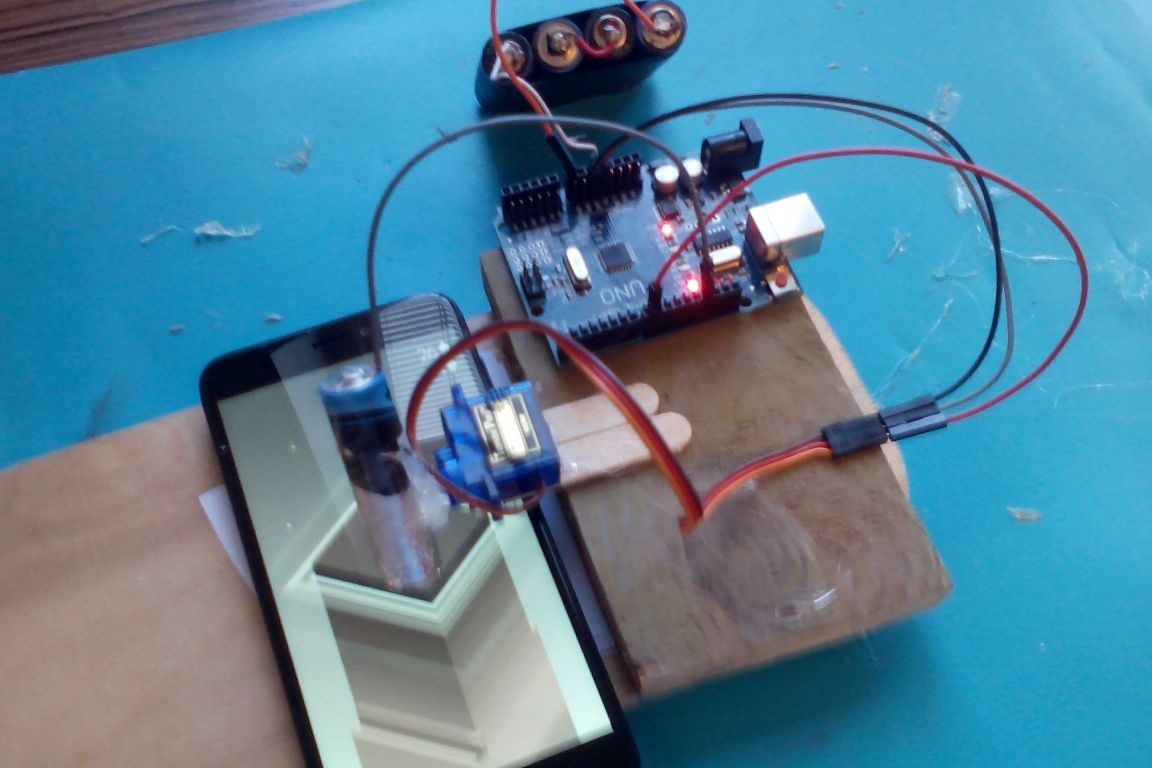
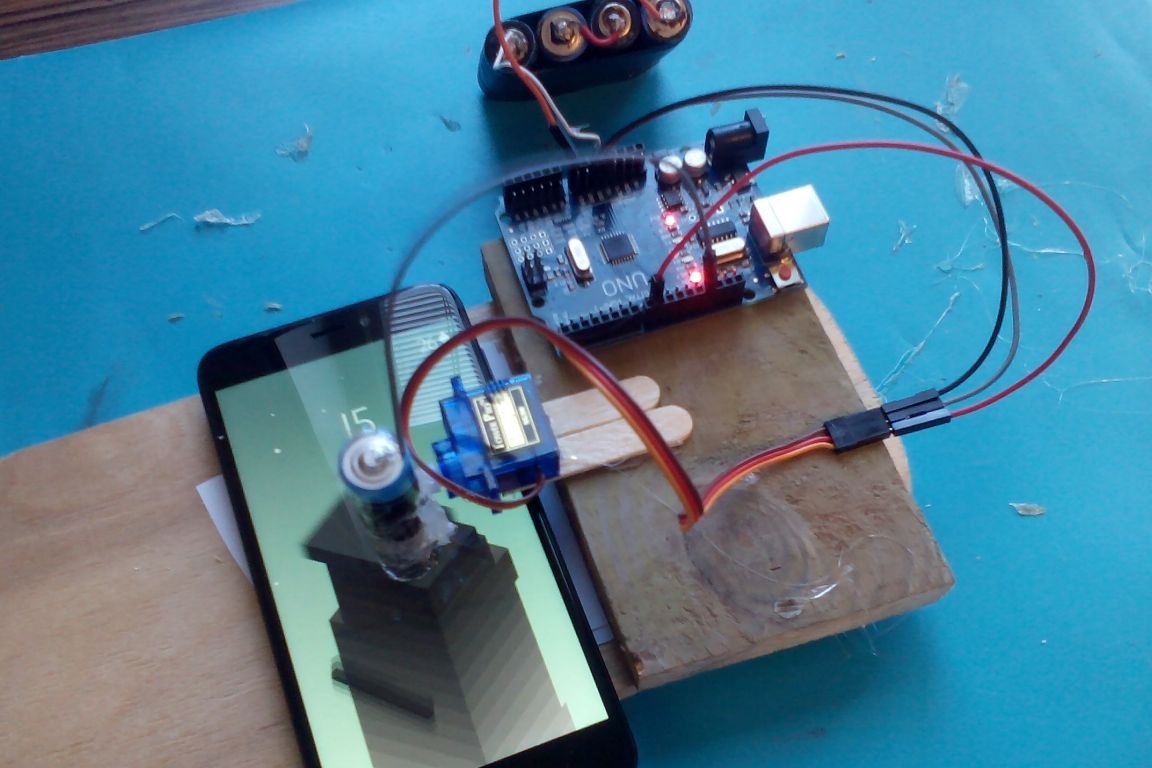
ובכן, זהו! הפשוטים שלנו הרובוט מוכן וזה נשאר רק כדי לבדוק את זה! לשם כך, הניחו את הטלפון מתחת לחרט, הפעלו את אפליקציית ה- Stak והניחו את הטלפון כך שהוא יהיה מעל לחצן "הפעל", המצוין באמצעות חץ, אנו מחברים כוח לארדואינו או בעזרת מתאם מיוחד או שנפיק את הפלוס מה"סוללה "שלנו ל- Uin ב- Arduino, ומינוס ל- gnd. לאחר חיבור הכוח, הרובוט שלנו מתחיל מייד "לשחק". ולמרות שבגלל העובדה שלא השתמשתי בסטיילוס רגיל, אלא בסוללה, הרובוט שלנו לעיתים קרובות לא נכנס לקצב והחמיץ, הוא "שיחק זמן רב. אם הכל נעשה בצורה מדויקת מאוד, הוא בדרך כלל ישחק עד שהטלפון ייכבה.

תודה לכולכם על תשומת הלב!