
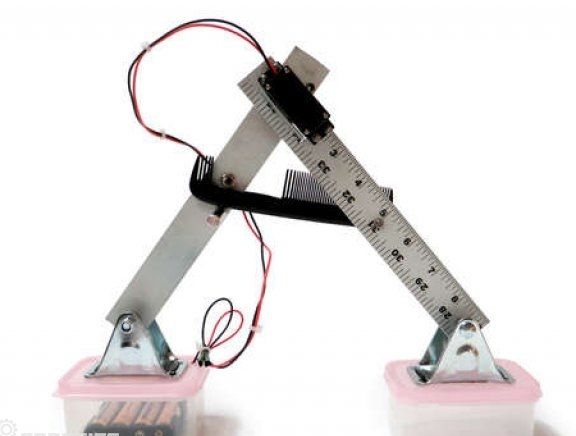
המוזרות של רובוט כזה היא שהוא מורכב מקו מדידה וחפצי בית. הרובוט מתייחס לסוג ההליכה. לדברי המחבר, עם כל הכלים והחומרים הדרושים, הרכבת רובוט כזה תארך רק כמה שעות.
חומרים וכלים להרכבה:
- servomotor מוגדר לסיבוב ישיר;
- סרגלים מאלומיניום בגודל 2 - 18 ";
- שני מכולות מזון קטנות;
- שני גלילים עם גלגלים בגודל 2 "- 3";
- עט כדורי רגיל אחד;
- צדפות צד אחד;
- עשרה ברגים קטנים עם אגוזים;
- ארבעה מנקים קטנים;
- משקל משקל נגדי אחד 2 "- 3";
- ארבע מסמרות;
- DPDT מסוג מתג אחד;
- מחזיק סוללות AA;
- ארבע סוללות AA;
- שני חוטים בצבעים שונים (שחור ואדום);
- קלטת חשמל.

תהליך הייצור של הרובוט:
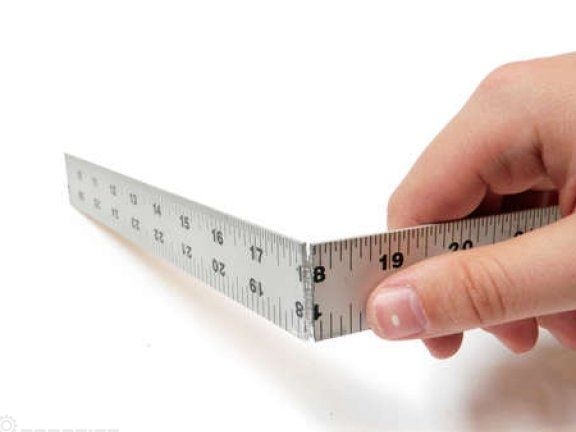
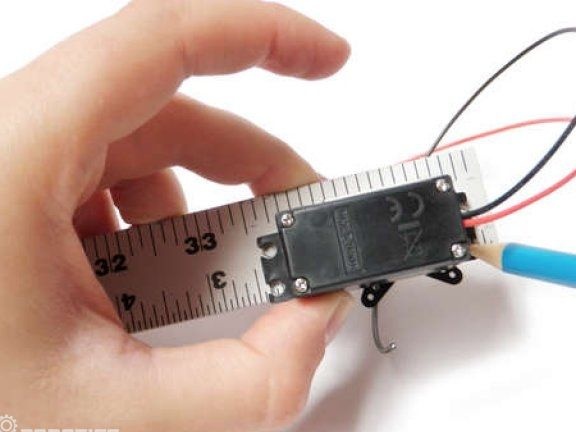
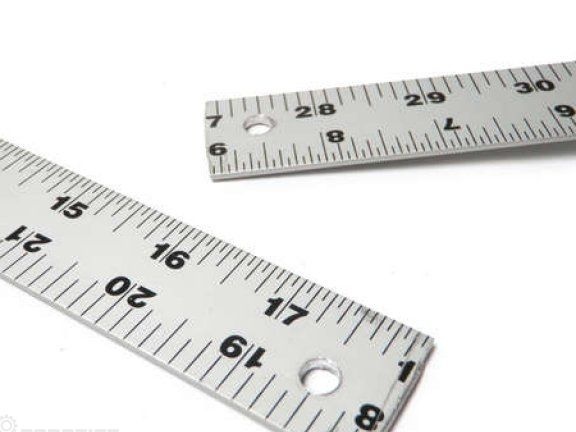
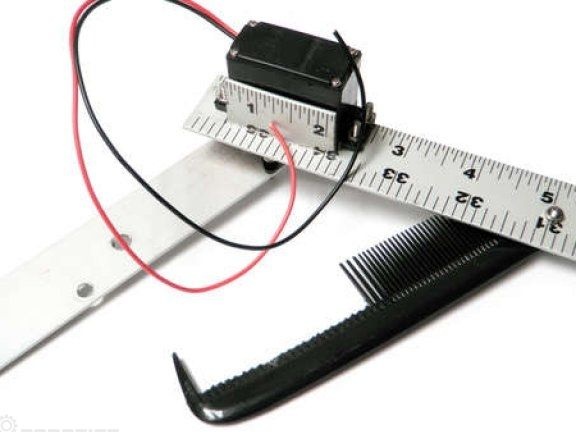
צעד ראשון. חתוך את הסרגל
ראשית עליך לקחת סרגל ולחתוך אותו עם מסור ספסל. בסך הכל יש להשיג שני קטעים בגודל של תשעה סנטימטרים.



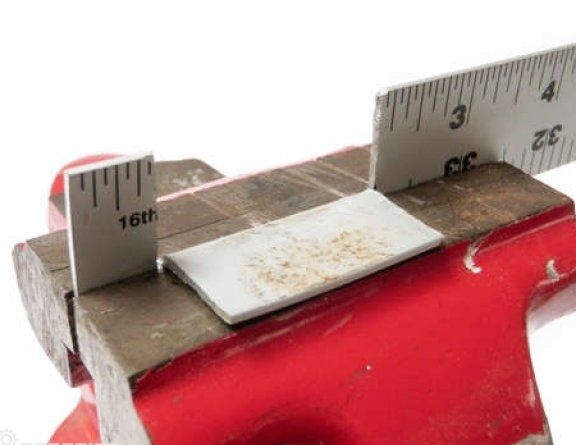
שלב שני צור סימנים
על חתיכה אחת של הסרגל אתה צריך לעשות שני חתכים 3/4. מקצה אחד העומק שלו צריך להיות 1/2 ", ומהקצה השני 2-1 / 8". בשלב הבא, צריך להיות מהודק בסרגל וליצור פטיש בכדי לכופף את הקטע, זה יהיה הבסיס להרכבת המנוע.



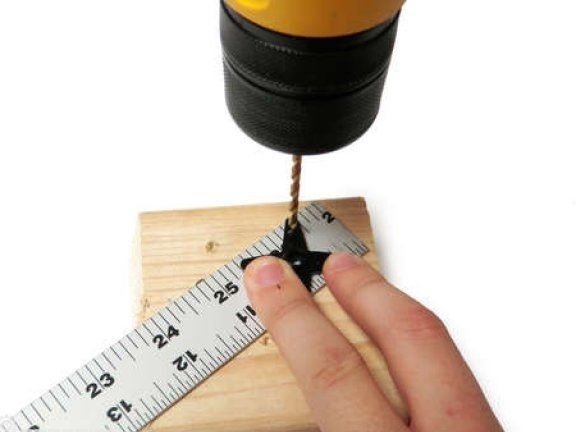
שלב שלישי קדחו חורים
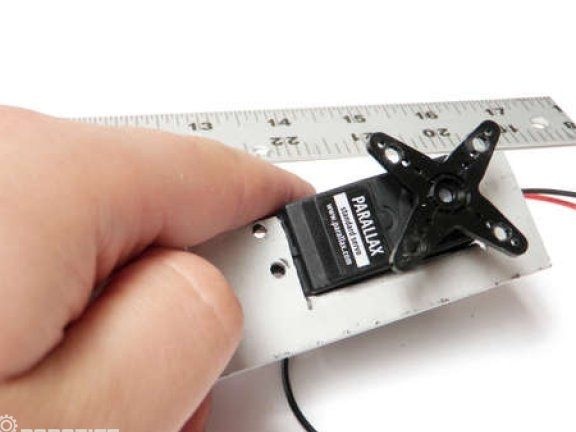
עכשיו אתה צריך לקחת את סרוו המנוע ולחבר אותו למקום בו הוא יעלה. ואז בעזרת עיפרון אתה צריך לעשות סימנים שבהם לאחר מכן אתה צריך לקדוח חורים בקוטר 1/8 ".



עכשיו אתה צריך לקדוח חור 1/4 ", צעד לאחור מקצה השליט 1/2". נקדח את החור בקצה ההפוך ממנו יותקן המנוע. יש לקדוח את אותו חור בסוף חתיכה נוספת של השליט.


עכשיו אתה צריך לקדוח חורים בלהבי הסרוו, לשם כך הם צריכים להסיר. בסך הכל, עליך לקדוח 4 חורים כפי שצוין בתמונה בקוטר 1/8 ". בשלב הבא, יש לחבר את הלהבים לקצה הסרגל, לפסוע לאחור מהקצה 1/2". כעת צריך ליצור ארבע חורים דומים בסרגל.





ולבסוף, עליך לקדוח חורים בגודל 1/8 ", תוך כדי צעד אחורה ממקום ההרכבה של המנוע 5". כמו כן, עליך לקדוח חורים בגודל 3/16 במנגנון המנוע. אתה צריך גם לקדוח חור גדול נוסף אליו מתאימים ברגי הסרוו. זה הכל, כל החורים להרכבת המבנה מוכנים.
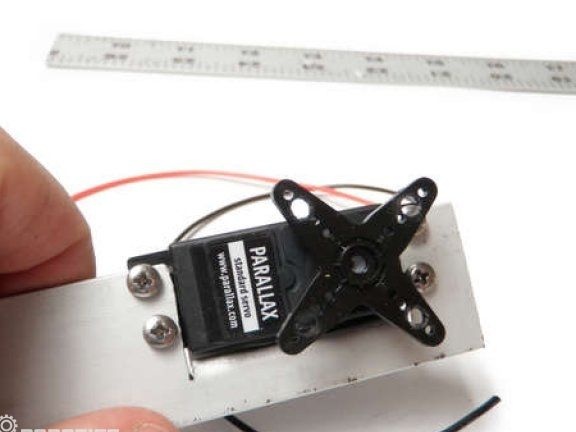
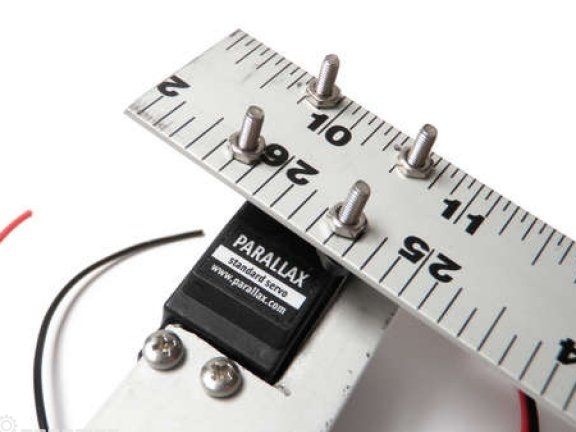
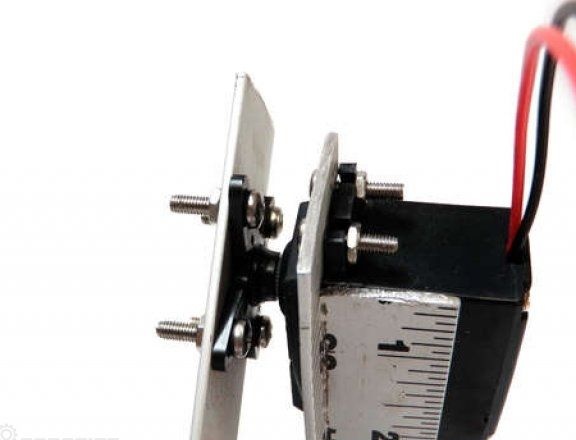
שלב רביעי התקנת מנוע
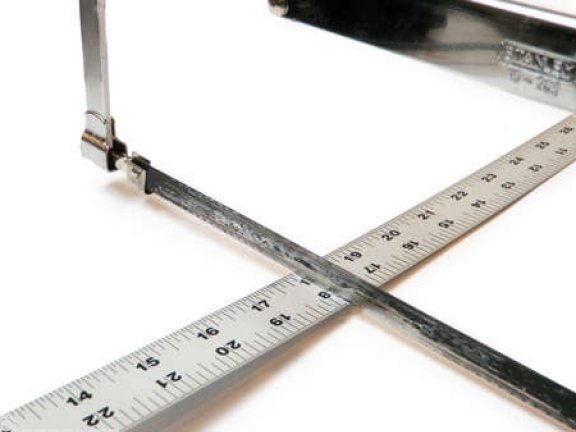
יש להרכיב את המנוע על סרגל עם אומים וברגים.כדי להבטיח פרופיל נמוך, על ראשי הברגים להיות ממוקמים בצד של להבי סרוו. לאחר מכן, יש לחבר את המחצית השנייה של הסרגל ללהבי הסרמוטור. במקרה זה, יש להפנות את ראשי הברגים פנימה כך ששום דבר לא יפריע לתנועת השליטים.

שלב חמישי הכנת צדפות
בצד אחד של הקלקילטל יש להסיר שני סנטימטרים של שיניים. הדרך הקלה ביותר לעשות זאת היא באמצעות חותך צד. בקצה המזללה אתה צריך להשאיר מספר מסוים של ציפורן, בזכותם המסרק ימשיך לעקוב. בקצה, אתה צריך לקדוח חור 1/8 ". בשלב הסופי, המסרק נדבק בזהירות עם נייר זכוכית למצב חלק.






שלב שישי התקנת צדפות
יש להכניס בורג לחור הסקאלופ ואז יש לשים שני מכבשים על הבורג, הם יאפשרו לך לקחת את המסרק מהסרגלים למרחק מסוים. בשלב הסופי, הברגה מותקנת בסרגל ואז הסיבוב קבוע באום.

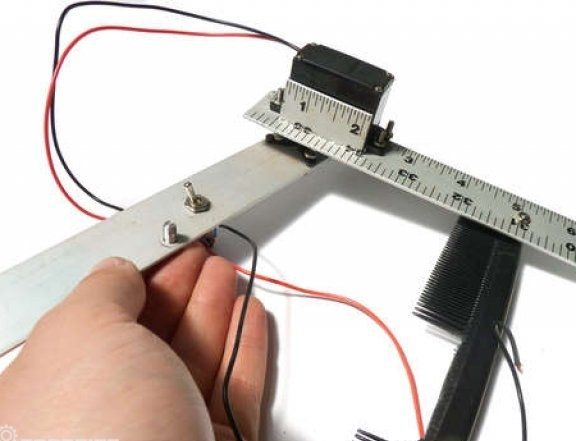
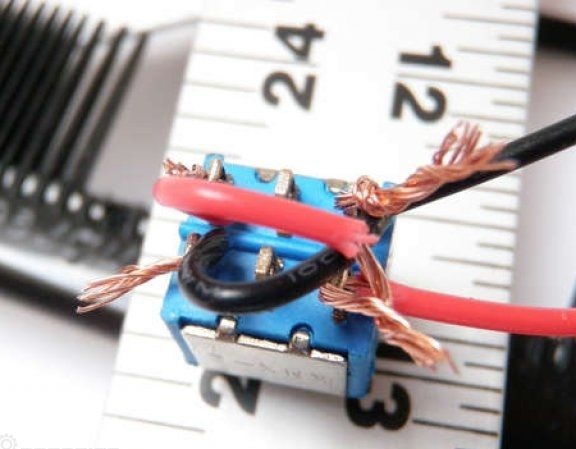
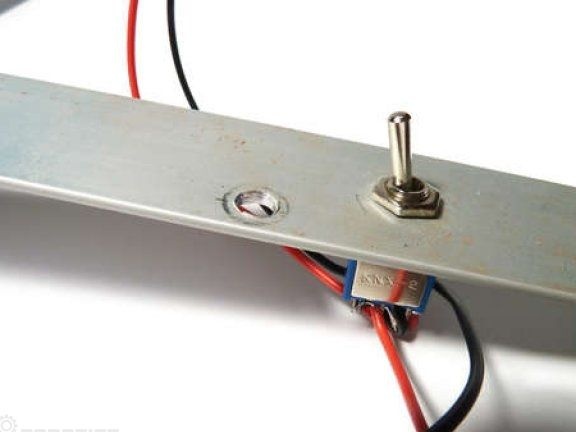
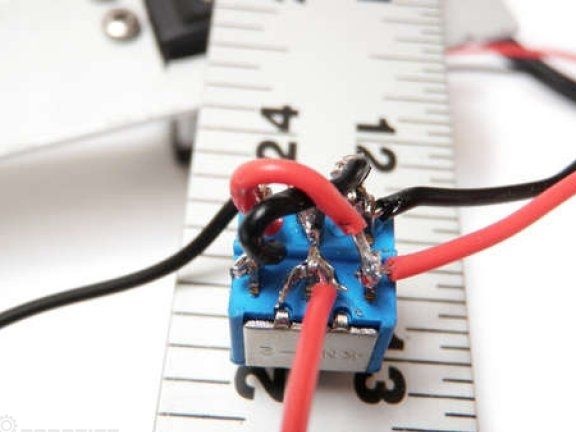
שלב שביעי. מתג הרכבה
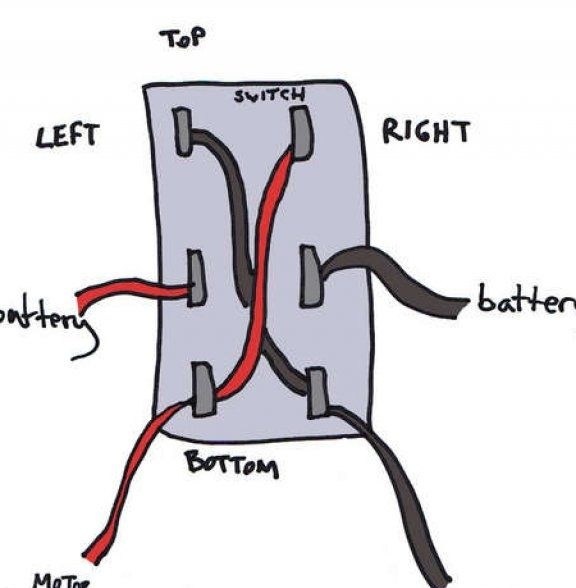
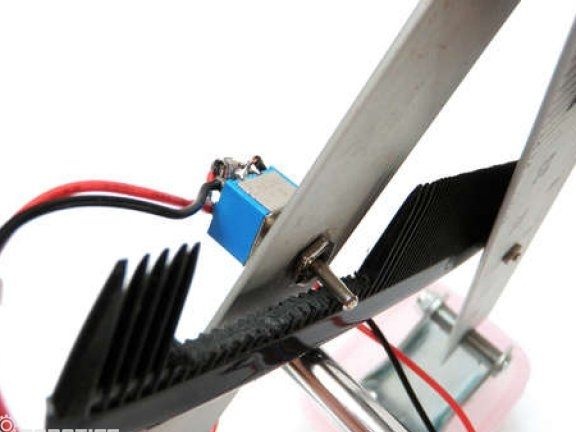
יש להכניס את המתג לחור המוכן ולאבטח בעזרת אגוז. יש להכניס את המתג למצב המצוין בתצלומים. עכשיו אתה צריך לקחת שתי חתיכות חוט, אדום ושחור, והלחמתן למתג כמוצג בתמונה. אז אתה צריך להלחם שני חוטים ארוכים למגעים הצדדיים של המתג.

שלב שמונה. התקנה נגד משקל נגד.
משקל הנגד מותקן בחלק זה של הקו בו מותקן סרוו מוטור. המסרק מותקן על גבי משקל הנגד.
שלב תשע. חתוך את הידית
קח את האמפולה מהעט הכדורי ואז חתך את העט לשני חלקים סנטימטר. בשלב הבא, יש לחתוך את הצינורות המיוצרים לשניים, כתוצאה מכך ייצאו ארבע צינורות.


שלב עשר מיצוי גלגלים
עכשיו אתה צריך לקחת שני גלילים ולפרק אותם על ידי הסרת הגלגלים. יש לשים גלגלים בצד, ניתן להשתמש בהם באחרים תוצרת בית.



שלב אחת עשרה. צור נקודות ציר
יש למקם את הדיור מהגלגל במרכז המכסה של מיכל הפלסטיק. עכשיו אתה צריך לקדוח ארבעה חורים ולאבטח את האלמנט בקשרים.

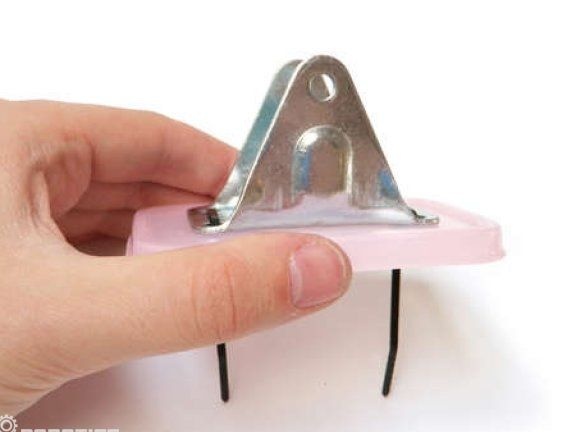

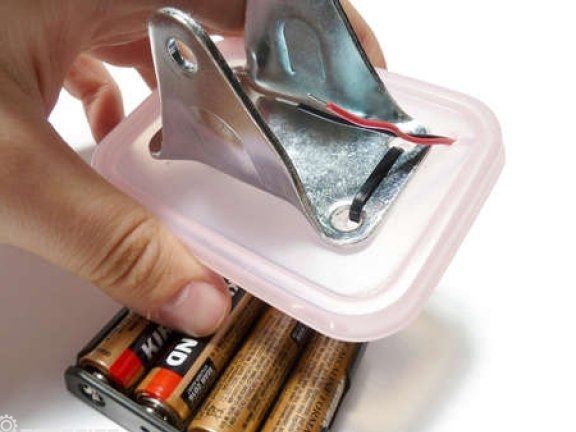



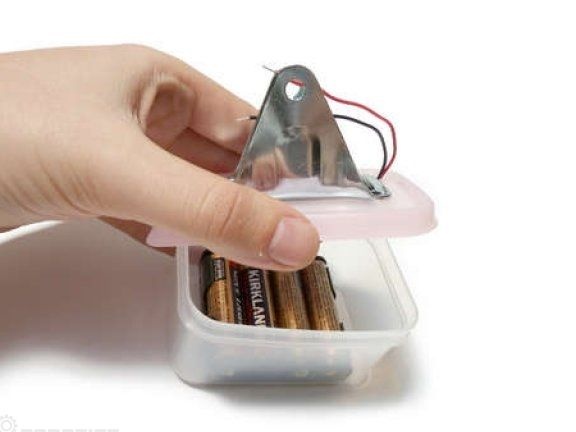

כמו כן, בשלב זה תוכלו להתקין מקור חשמל. לשם כך, באחד המכולות אתה צריך לקדוח חור ולהתקין את הסוללות בפנים. לאחר מכן, דרך החור הקדוח, עליכם להוציא את החיווט.
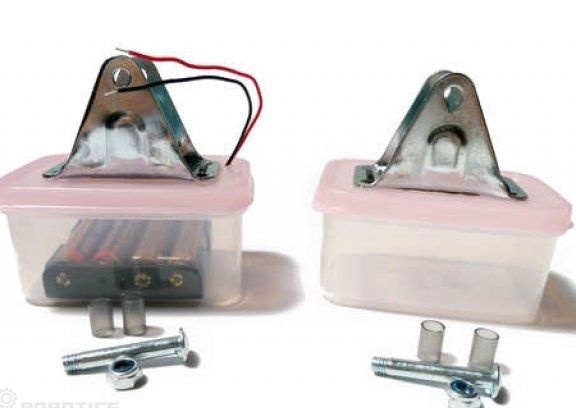
שלב שתים עשרה. הרכבת רובוטים
לצד התומכים אתה צריך לצרף את הקצוות של שני הסרגלים כמצוין בתצלומים. כעת נותר רק לחבר את החוטים מההספק והמתג, קל לעשות זאת לפי צבעי החוטים.
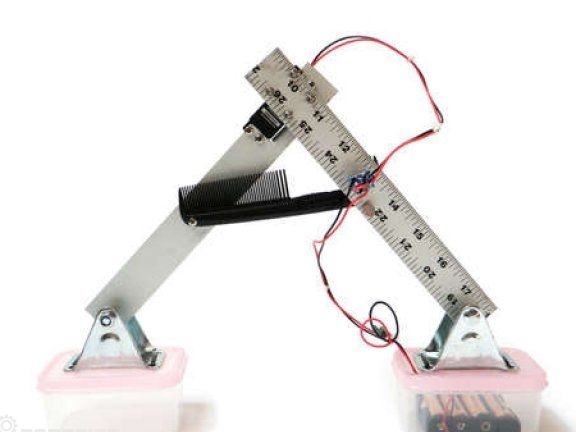
זה הכל, הרובוט מוכן. כאשר המנוע פועל, הרובוט מתחיל לנוע, בשלב כלשהו, הקלאמבט מכבה את הכוח ורגלי הרובוט חוזרות למצבם המקורי. ואז המתג מדליק שוב את המעגל, ורגלי הרובוט נדחסות שוב. אז הוא ילך.