
מכשיר מעניין הומצא ויוצר על ידי המאסטר, זהו מכשיר לכיפוף תיל מכל צורה שהיא. הכנת קפיצים היא אחת התכונות שלה. מכונה זו מסוגלת לכופף תיל 0.8 / 0.9 / 1 מ"מ לכל צורה דו-ממדית.
המטרה העיקרית לייצור מכונה זו הייתה אוטומציה של תהליך הכיפוף. מכונות תוצרת בית אחרות אינן מדויקות במיוחד, והכיפוף שלהן יש רדיוס גדול למדי.
המשימה השנייה הייתה להפוך אותה לפשוטה ככל האפשר באמצעות חלקים ורכיבים זמינים בדרך כלל. חלקים מסוימים של המכונה מודפסים על מדפסת תלת ממדית, וניתן לרכוש חלקי מתכת בחנות.
בשביל מה המאסטר למכונה כזו? הוא מעוניין להכין דמויות לד, פתיתי שלג, כוכבים, פרחים וכו '. בייצורם יש צורך בחלקים זהים מחוט, ומכונה זו תקל על ייצורם.
בואו נצפה בסרטון וידאו קצר עם דוגמה למכשיר.
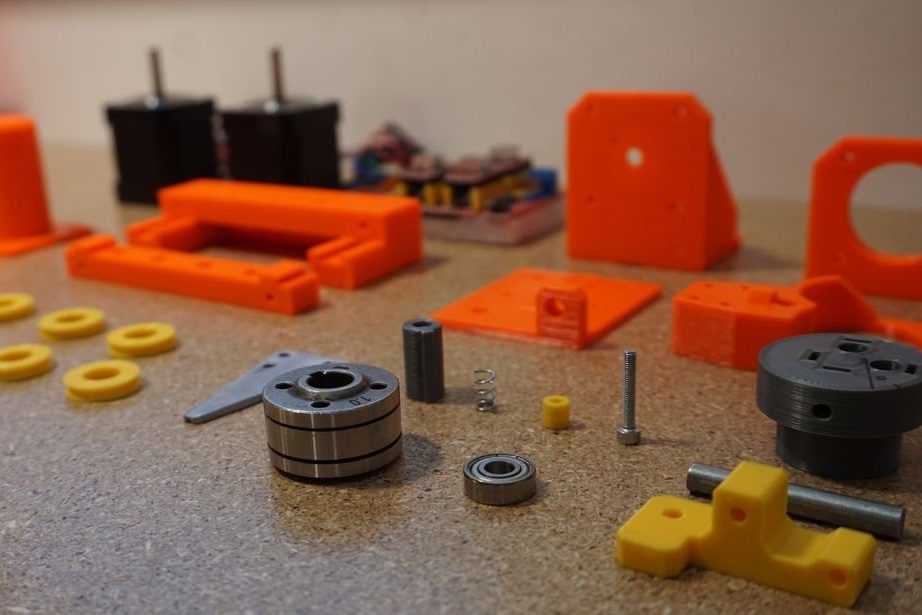
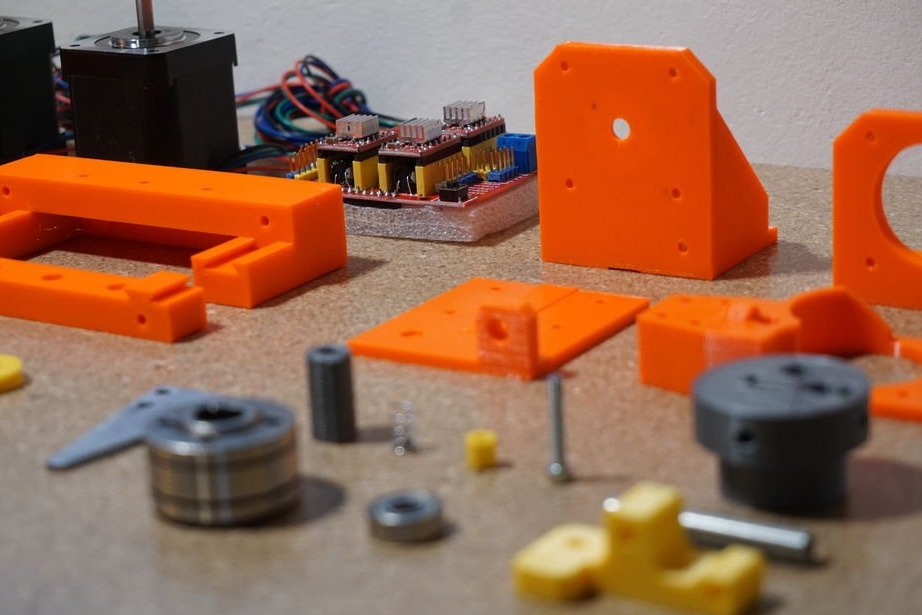
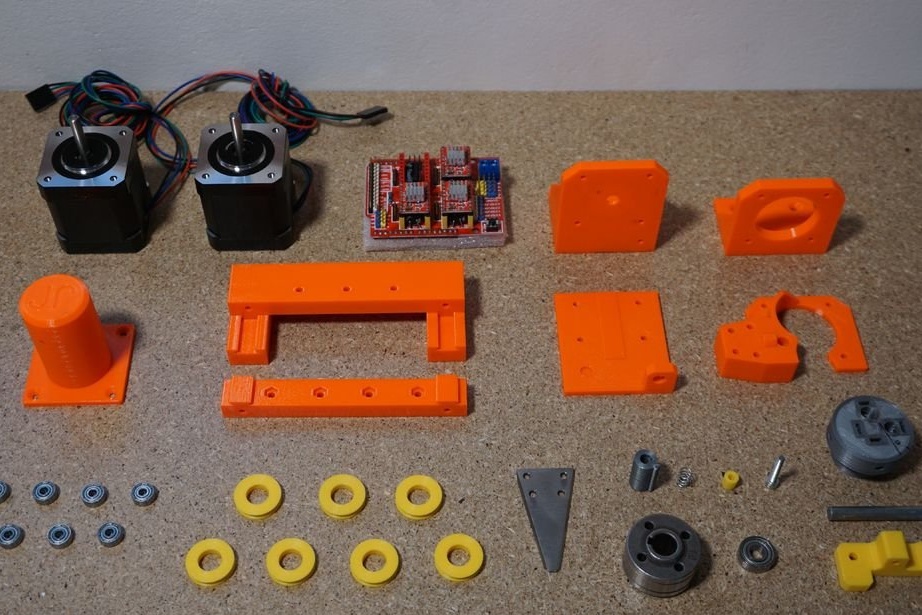
לכן, לייצור מכונה כזו, המאסטר השתמש בזה
כלים וחומרים:
-3D פרטים (ניתן להוריד קבצי הדפסה כאן);
-דבקות;
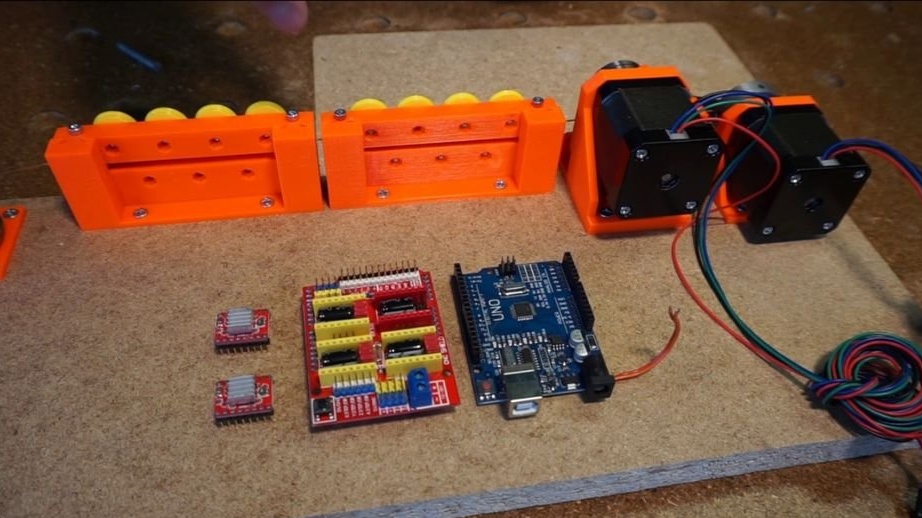
-ארדואינו UNO;
לוח הרחבה ל- Arduino UNO;
מנהל התקן A4988 -2 יח ';
מנוע מהיר NEMA17 -2 יח ';
-12V 3A ספק כוח;
- מנגנון הזנת תיל;
-קפיץ 4x4 מ"מ;
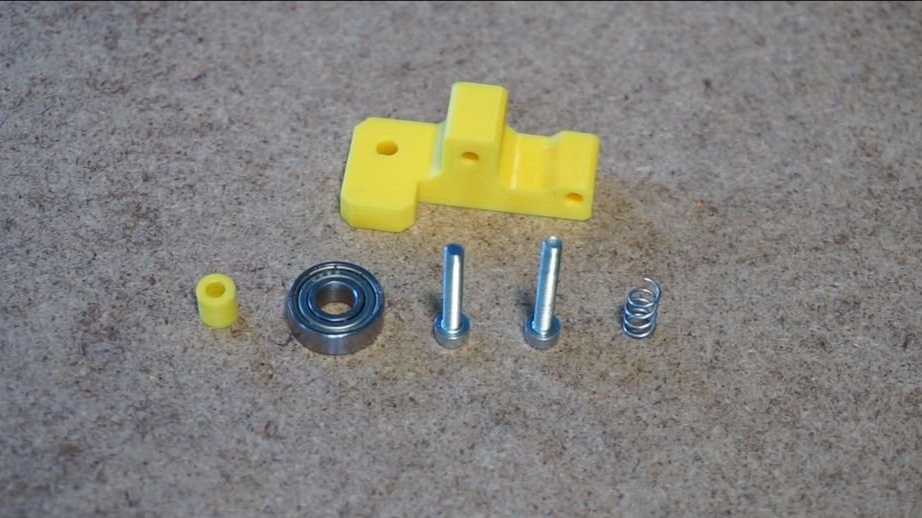
- מיסב 3x10x4 מ"מ;
נושאת 6x15x4 מ"מ;
מוט פלדה -6 מ"מ;
- יריעת פלדה בעובי 2 מ"מ;
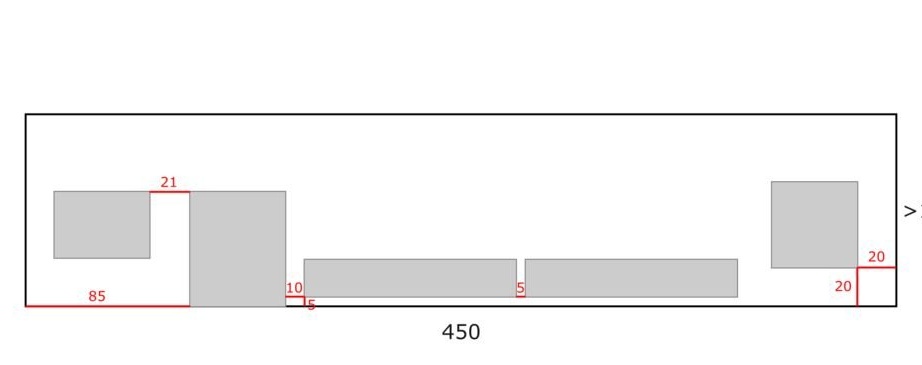
לוח עץ לבסיס 450x100 מ"מ;
- מברג;
-גון;
שלב ראשון: איך זה עובד
בואו נראה איך עובדת המכונה (מימין לשמאל).
מחזיק סליל - הוא מחזיק את סליל החוט לעיבוד המכונה.
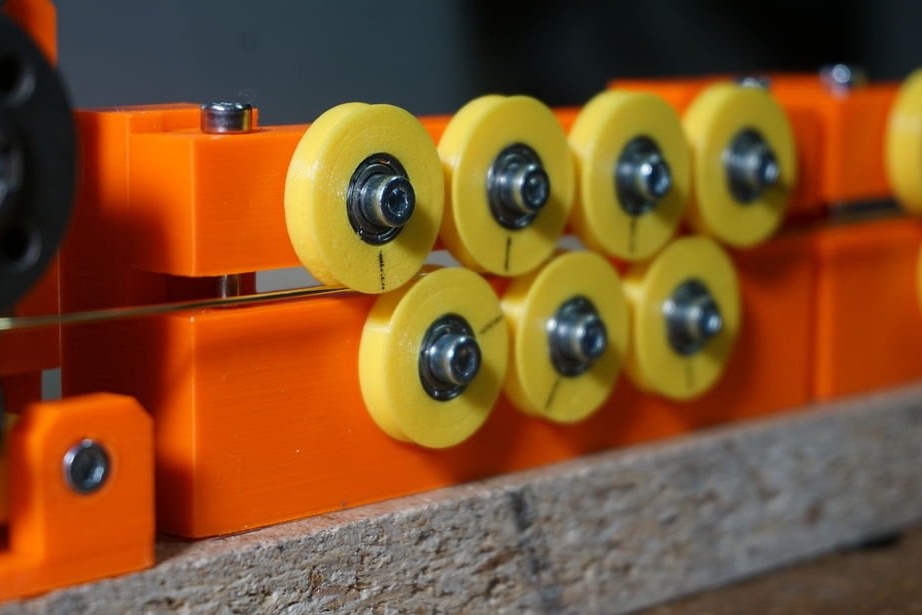
מיישר - סט של 7 גלילים כך שהחוט יהיה כמה שיותר אחיד. עבודה עם חוט ישר היא קריטית. זו הסיבה ששני מיישרים.
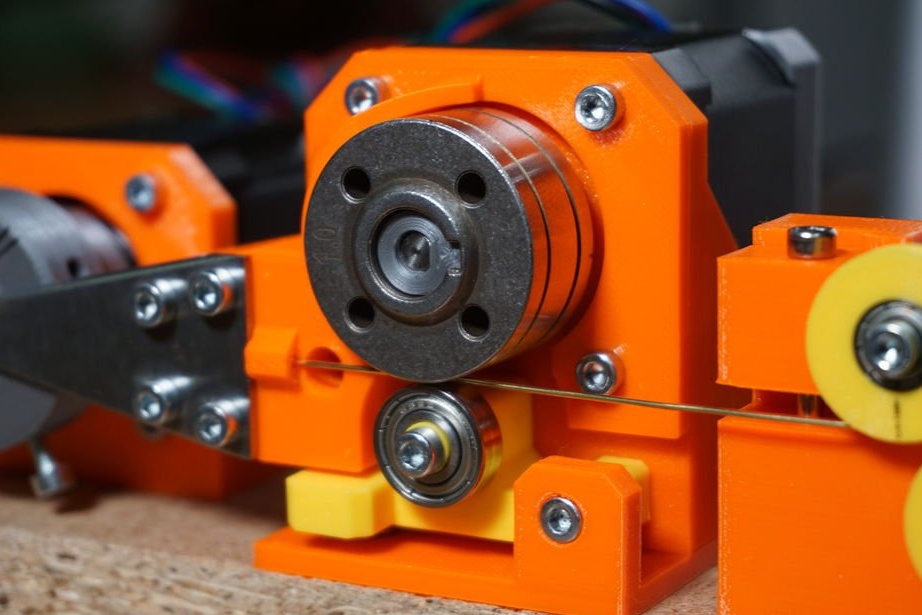
Broach - אתה יכול למצוא מנגנון דומה במדפסת התלת מימד שלך. סט גלגלי שיניים מושך את החוט מהסלגל דרך הגלילים ודוחף אותו לראש הכיפוף. על מנגנון ההזנה להיות בעל לחץ חוט מספיק כדי שהוא לא יחליק. עוד על כך בהמשך.
מכונת כיפוף - היא מכופפת את החוט לצורה מתוכנת.
כל זה נשלט על ידי האו"ם הארדואינו אחד עם מגן CNC.פקודה נשלחת לארדואינו מהמחשב והיא מתרגמת אותם לפקודות למנועי צעד.

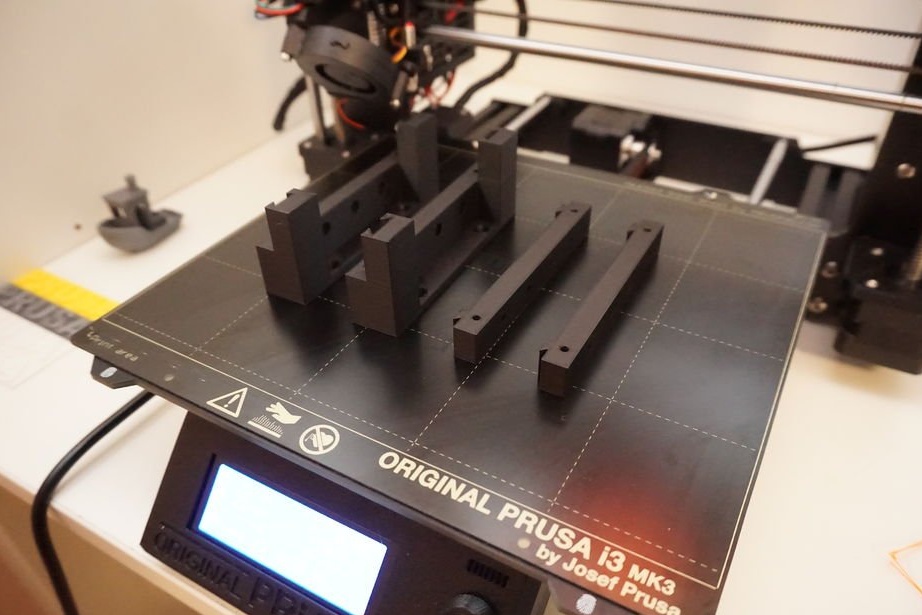
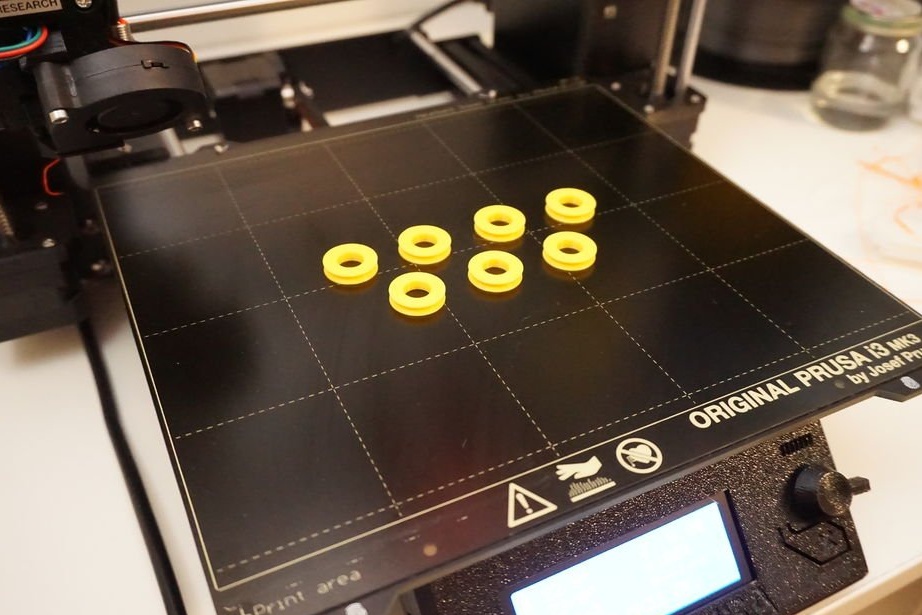
שלב שני: הדפסת חלקים
עליך להדפיס את הפרטים הבאים ובכמות הבאה (כדי למנוע בלבול, הטקסט המקורי):
בנדר
ראש כלי
מסגרת מוטורית
פידר
מסגרת מוטורית
מסגרת תחתונה
מדריך חוט
עגלת הילוכים בטלה
מרווח הילוכים לבטל
מרווח הילוכים האכלה
צלחת כיפוף (תבנית)
גלילי מחליק (2x)
מסגרת מיטה (2x)
מסגרת הילוכים עליונה (2x)
רולר (14X)
בעל סליל
גובה שכבה בעת הדפסת 0.15 מ"מ. מילוי 40%. ההדפסה אורכת יומיים.
שלב שלישי: מכונת כיפוף
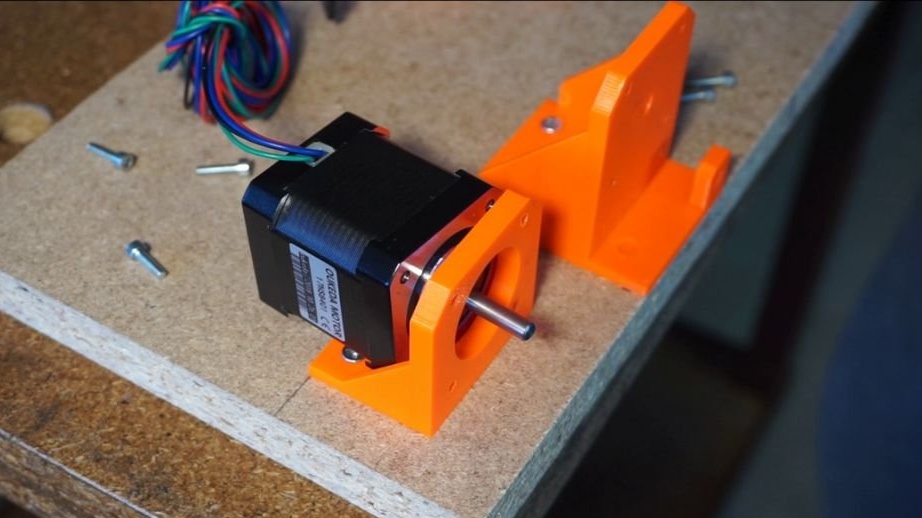
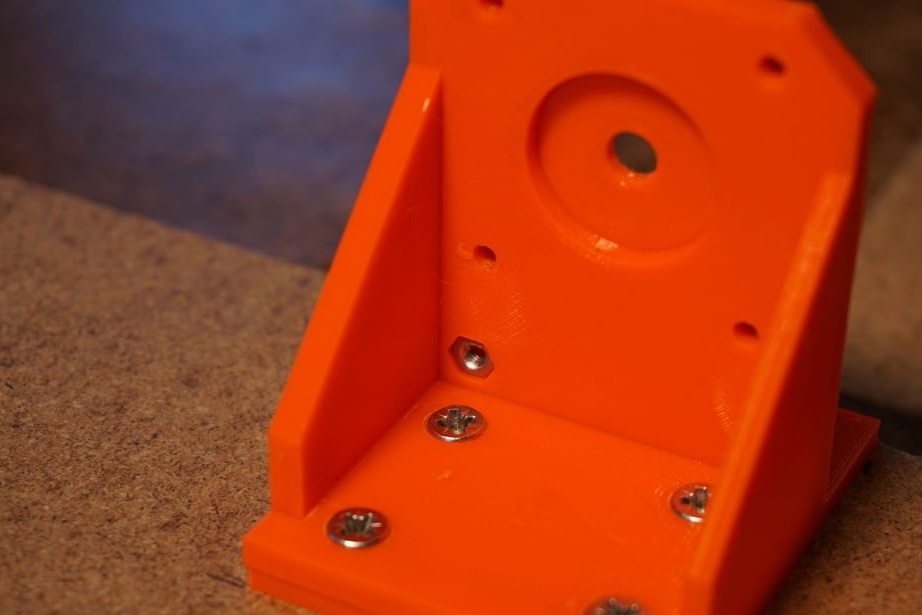
המאסטר מברג שתי מסגרות לבסיס. חשוב להתקין את שתי המסגרות כמוצג בציור.
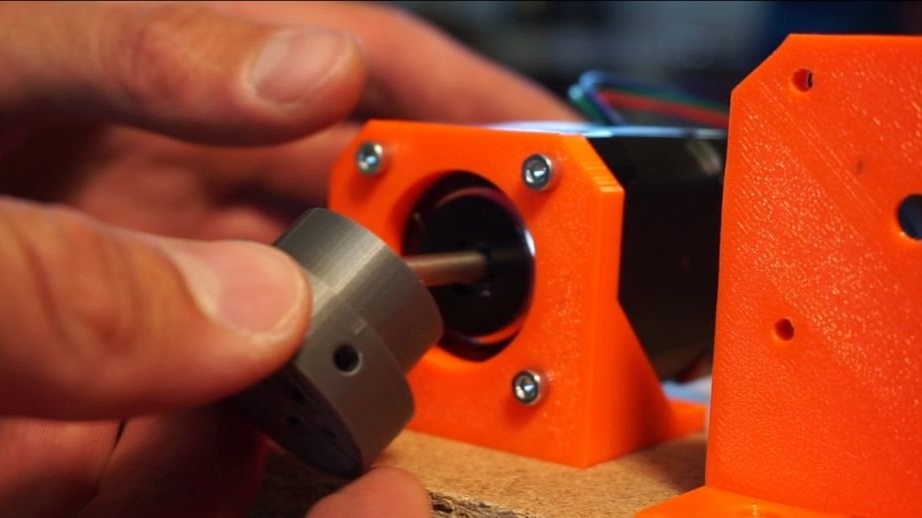
מהדק את מנוע צעד למסגרת. מאבטח את הראש לציר המנוע.


שלב רביעי: חובק
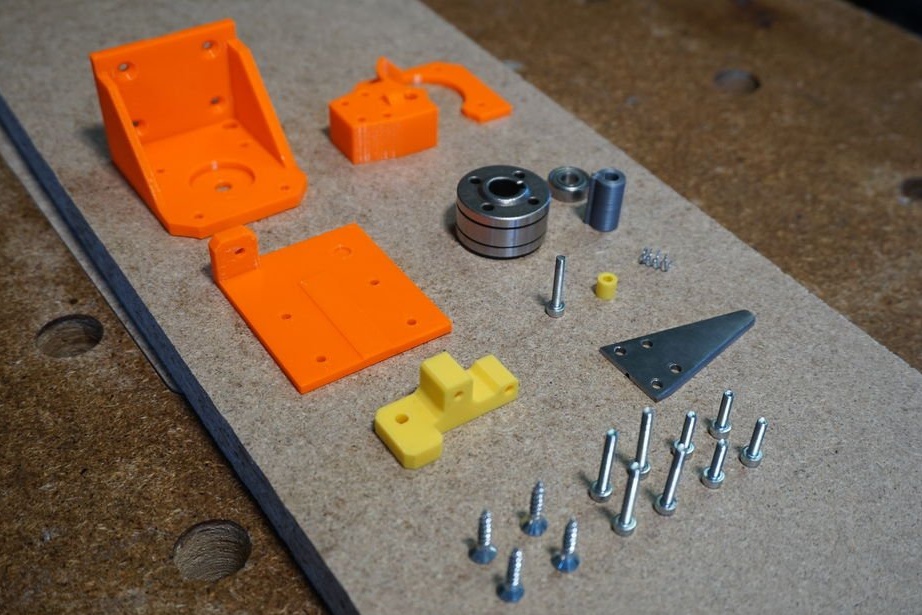
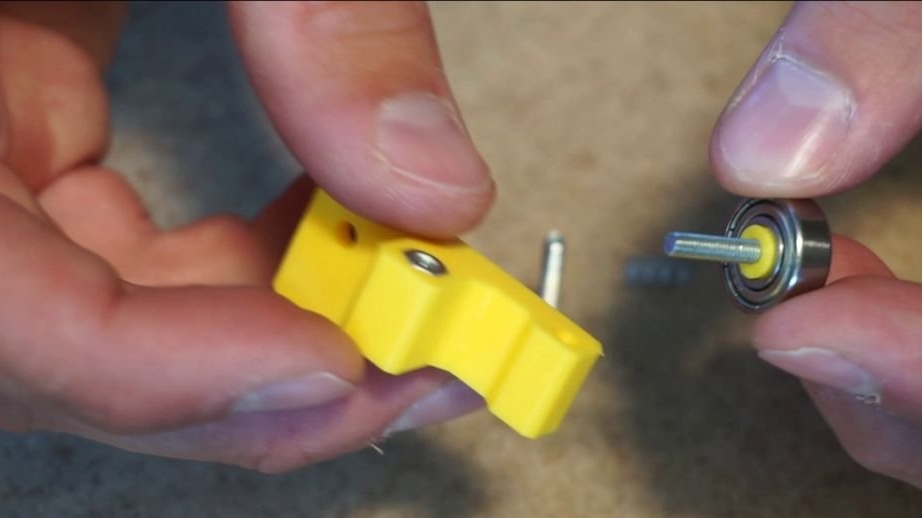
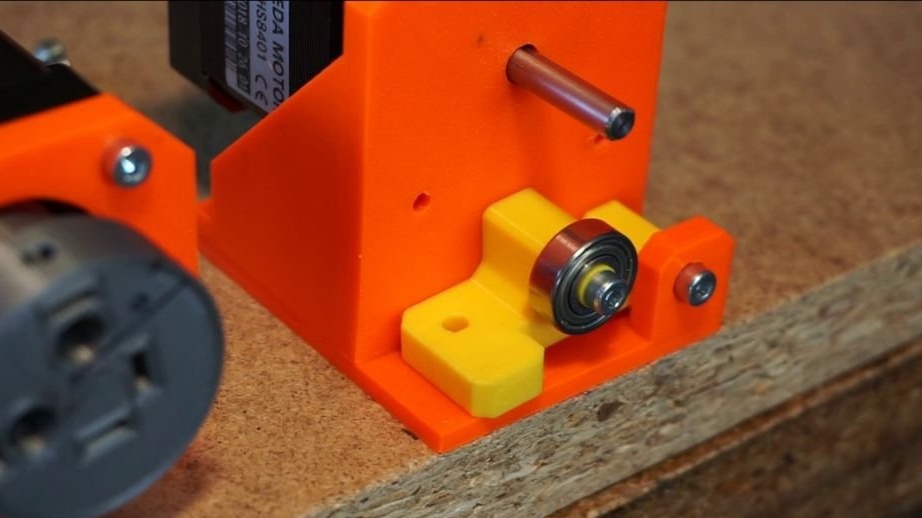
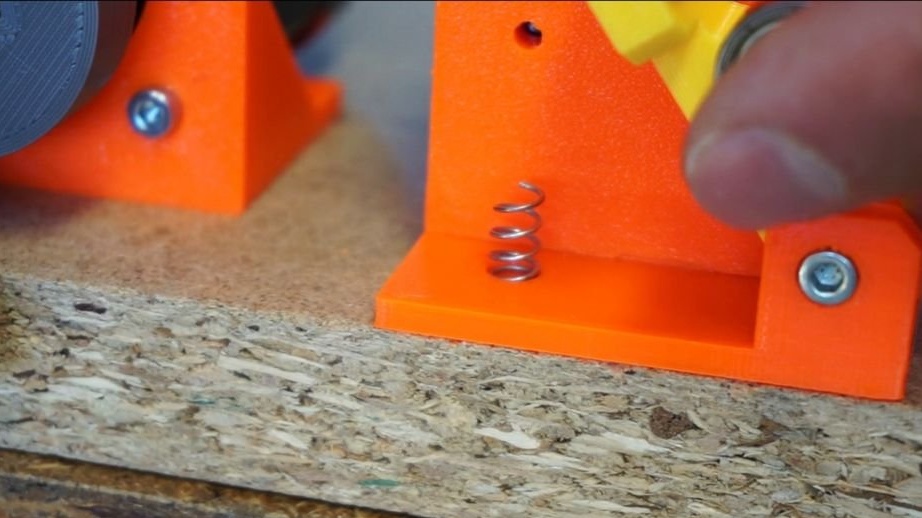
המסגרת כבר מותקנת, ולכן השלב הראשון ביצירת מנגנון הזנה הוא בניית גררה להילוך הביניים, שתלחץ את החוט למנגנון ההזנה. הסר את אטם הפלסטיק בתוך המיסב 6x15x4 מ"מ. התקן את המיסב לבורג M3x20. התקן את אגוז ה- M3 בכרכרה והברג את המיסב אל הבורג. ודא שהמיסב מסתובב בחופשיות. הכנס את אגוז ה- M3 השני למסגרת המנוע (צד המנוע בפינה השמאלית התחתונה) והבריג את העגלה דרך התושבת הקטנה באמצעות בורג M3x20. אין להדק את הבריח יתר על המידה: על הכרכרה לנוע בחופשיות. הרם את הכרכרה והכניס את הקפיץ לחור שמתחתיו.
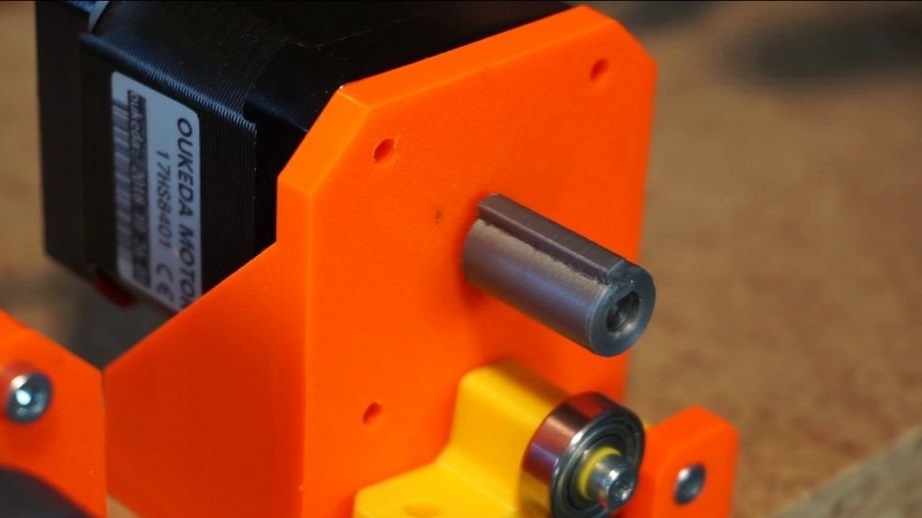
קח את מנוע הצעד השני והתקן אותו במסגרת המנוע. אל תבריג עדיין. לחץ על המרווח של מנגנון ההזנה לפיר המנוע והתקן את מנגנון ההזנה.
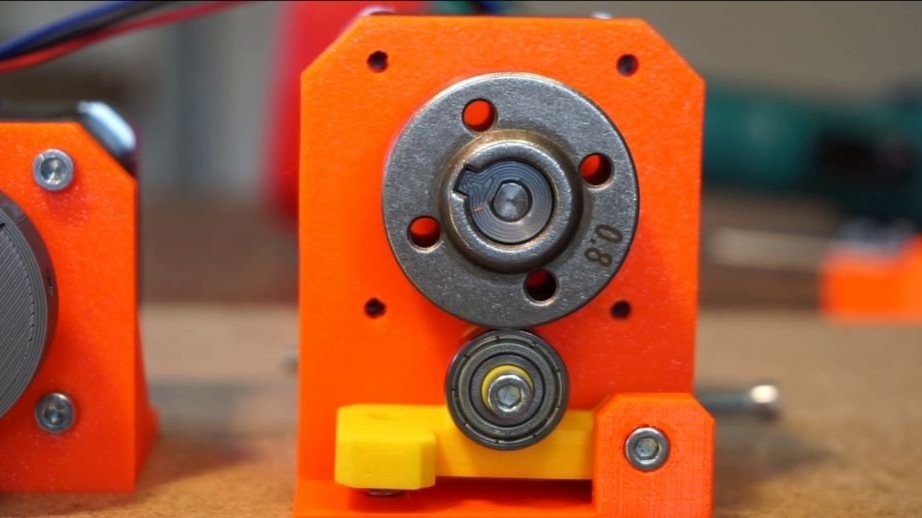
מנגנון ההזנה בו משתמש המאסטר נלקח ממכונת ריתוך MIG. למנגנון שתי סלולות על הסליל. אחד לחוט 0.8 מ"מ ואחד לחוט מ"מ. שלא כמו הילוכים (בעבר המאסטר ניסה להזין את החוט איתם), מנגנון זה אינו משאיר עקבות על החוט.
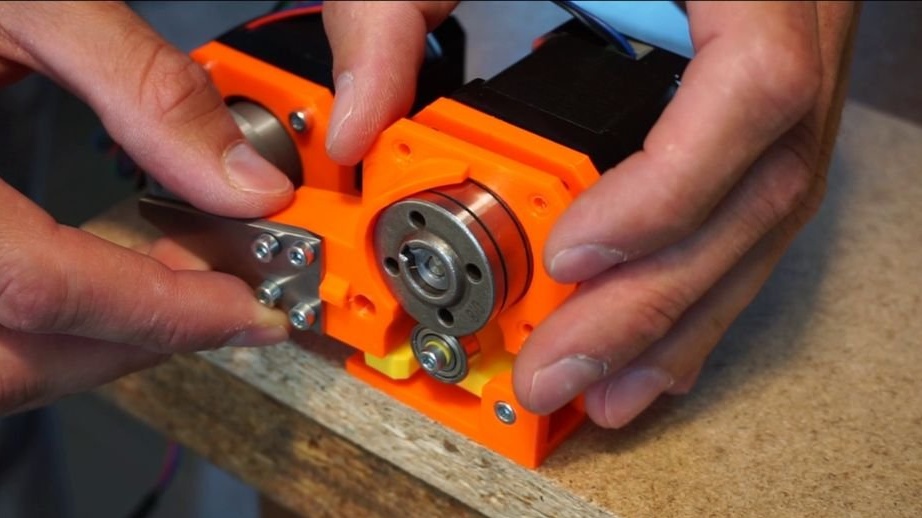
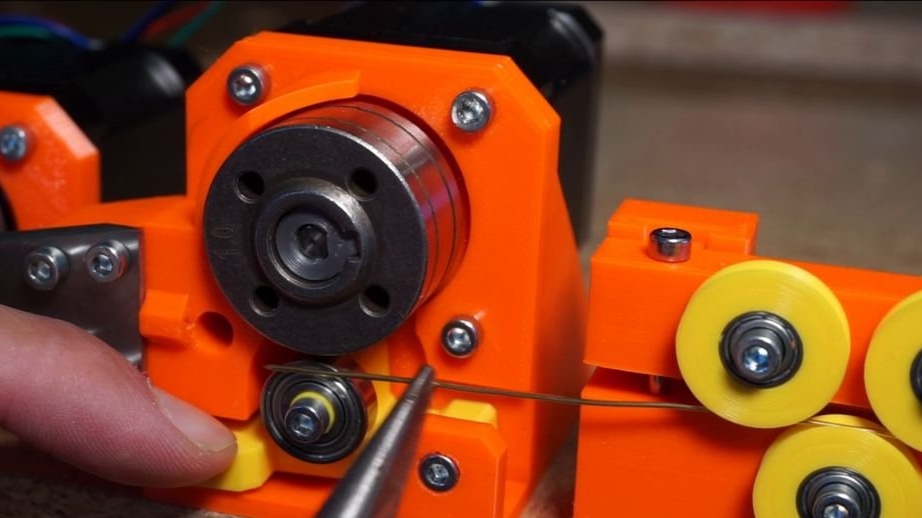
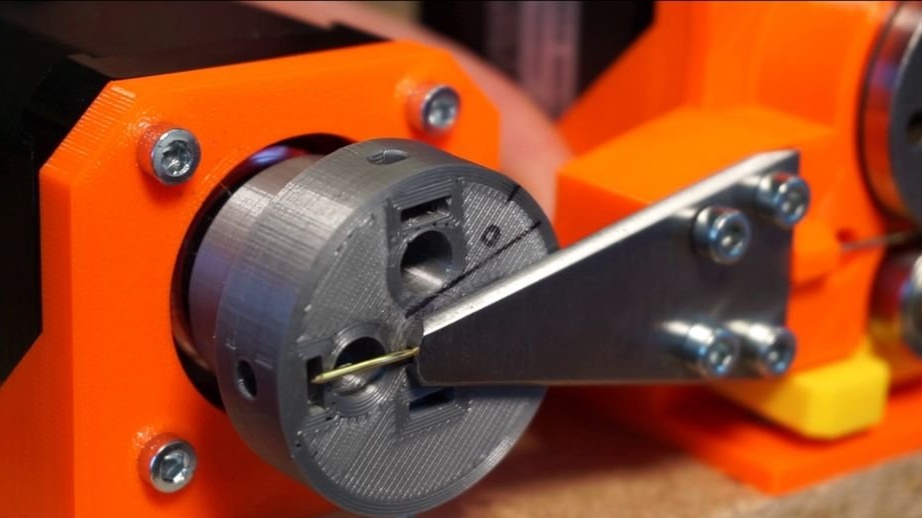
המזין ומתקן הכיפוף מחוברים באמצעות צלחת כיפוף - לוח מתכת בעובי 2 מ"מ עם חריץ קטן על הקיר האחורי, המזין את החוט ישירות למרכז ראש הכיפוף לכיפוף מושלם. להדפסה יש צלחת כיפוף מפלסטיק שעובדת מצוין, אך נשחקת במהירות ודורשת החלפה תכופה. אתה יכול להשתמש בו, או שאתה יכול להכין עליו לוחית מתכת.
בשלב הבא, קח את החלק הפלסטי של מכוון התיל והתקן את ארבעת אגוזי ה- M3 בחורים שבצדו האחורי. כעת הברג את לוחית הכיפוף עם ברגי M3x20. מקם את מכוון התיל מול מסגרת המנוע של מנגנון ההזנה והדק אותו למנוע עם ארבעה ברגי M3x12. התאם את מיקום צלחת הכיפוף. זה צריך להיות בדיוק במרכז ראש הכיפוף.
הברוש מוכן. אם יש לך חוט ישר, אתה יכול להשתמש בחוט ברגע זה. אחרת, אתה זקוק למיישר.





שלב חמישי: חובק
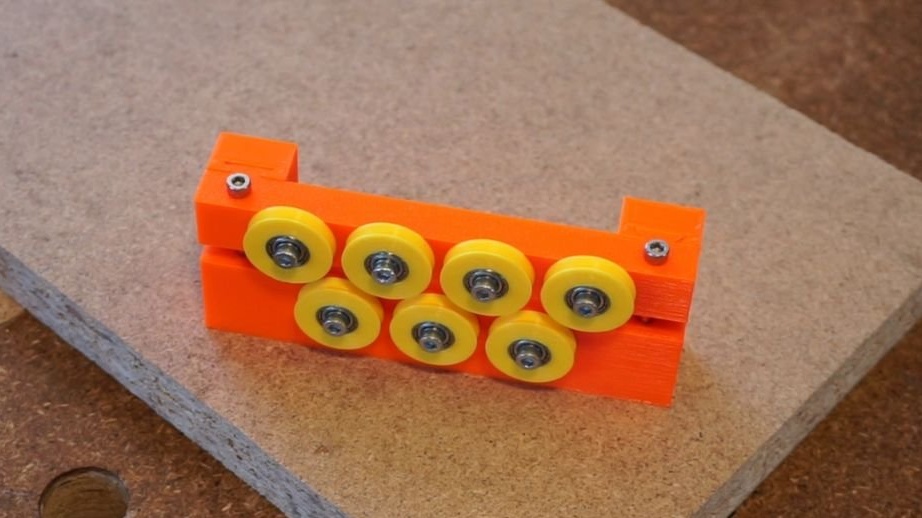
החוט בדרך כלל מסופק בצורה סליל. כדי לכופף את החוט, ראשית עליכם ליישר אותו. המיישר מורכב מ 7 גלילים (4 בחלקו העליון ו -3 בחלק התחתון), אותם ניתן להלחץ זה מול זה כדי להבטיח את המתח הנכון של החוט. זה גם מונע פיתול של החוט בזמן הכיפוף.
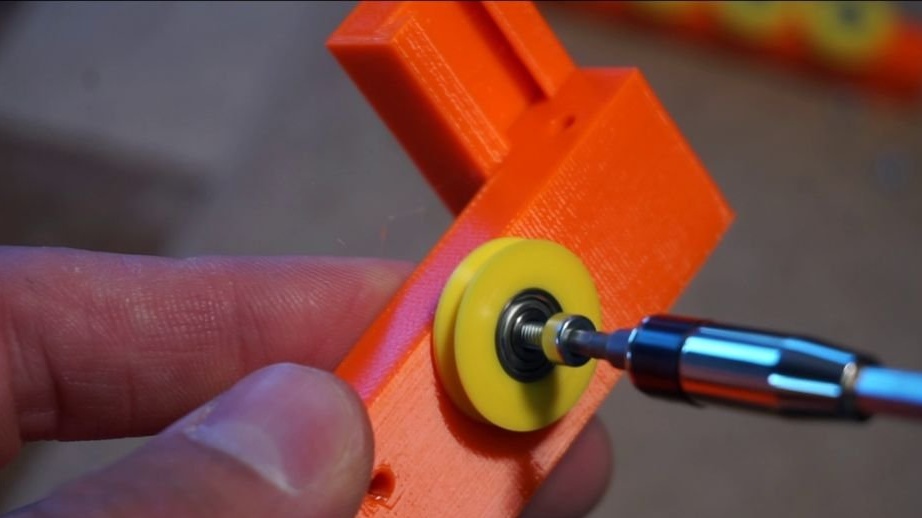
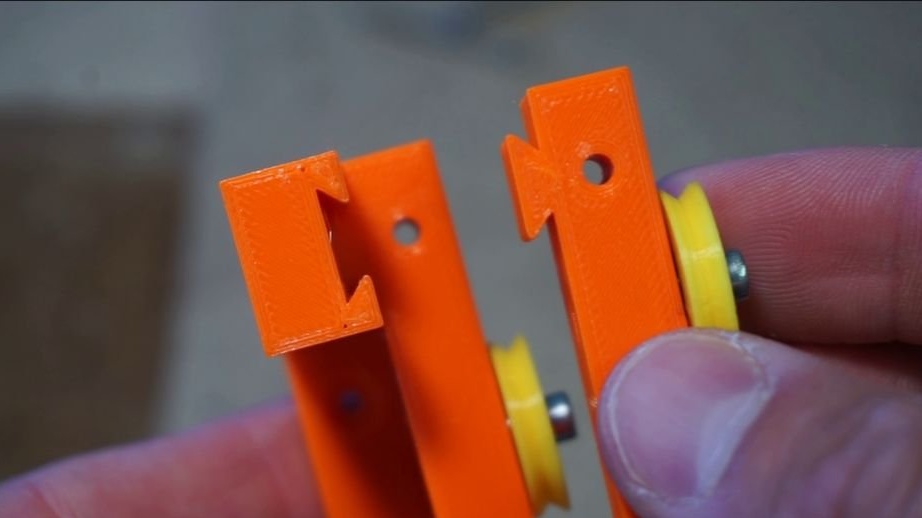
התחל את ההרכבה עם גלגלים. ראשית עליכם ללחוץ על המיסב 3x10x4 מ"מ לתוך בית הרים הפלסטי. הכנס את הבריח M3x12 בצד אחד ואת מכונת הכביסה M3 בצד השני של הגלגל. מכונת הכביסה תמנע חיכוך של הגלגל על המסגרת. הברג את כל הגלילים למסגרת התחתונה והעליונה. חבר את שתי המסגרות. אבטח את המסגרות עם שני ברגי M3x40.
אתה יכול לחסוך קצת כסף על מיסבים. הדפס את החלק Straightener_RollerNoBearing במקום את Straightener_Roller. אבל הביצועים יהיו מעט גרועים יותר.
לקבלת תוצאות טובות עוד יותר, השתמש בשני מיישרים ברציפות.




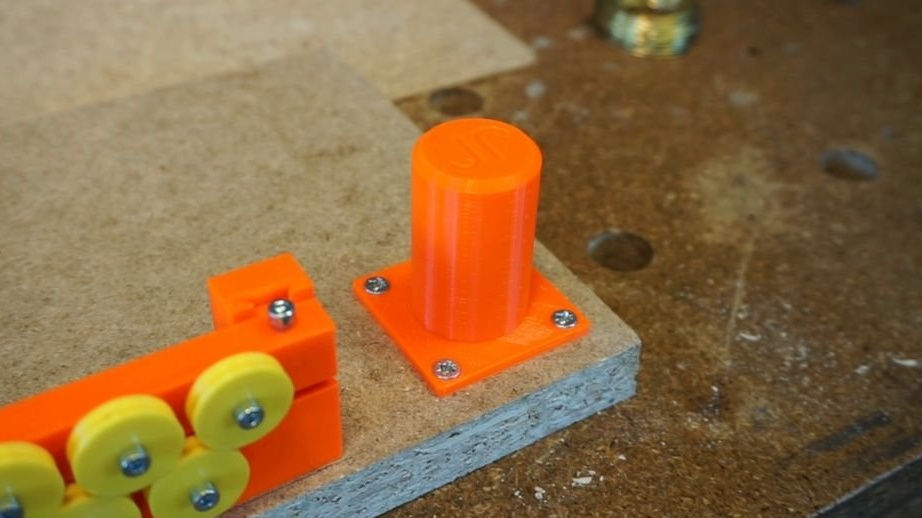
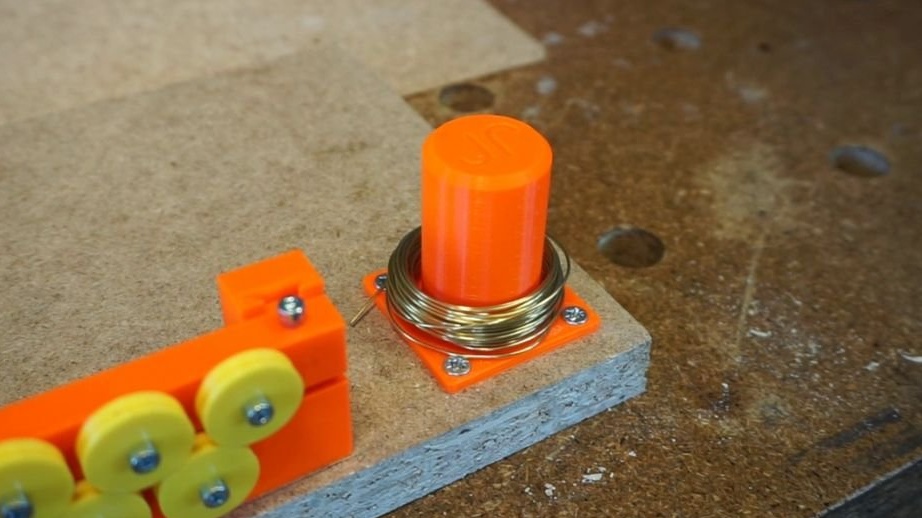
שלב שישי: מחזיק סליל
מחזיק הסליל הוא גליל פשוט המחזיק את החוט ומאפשר לו להירגע מהסליל. הברג אותו לבסיס עם ארבעה ברגים 3x16.
שלב שבע: התחבר
ראשית, יש להזין את חוט הכיפוף למכונה. המאסטר משתמש בחוטי פליז 0.8-1 מ"מ בצורת סליל.
החוט עובר מהסליל דרך הגלילים. פשוט תקע את החוט בין הגלגלים. ואז היא עוברת את החבורה.כוונן את מיקום מנגנון ההזנה כך שהמרזב ישים עם פני השטח של מכוון התיל. לחץ על הידית בהילוך הביניים ודחף את החוט דרך המזין לצלחת הכיפוף. שחרר את הידית ותן לו להילחץ נגד מנגנון ההזנה. כעת תוכל לגלול ידנית את מנגנון ההזנה כדי לדחוף את החוט לראש הכיפוף. התאם בזהירות את המתח על הגלילים על ידי הידוק הברגים. הגלגלים לא צריכים להסתובב בחופשיות, אך החוט צריך לנוע בצורה חלקה.
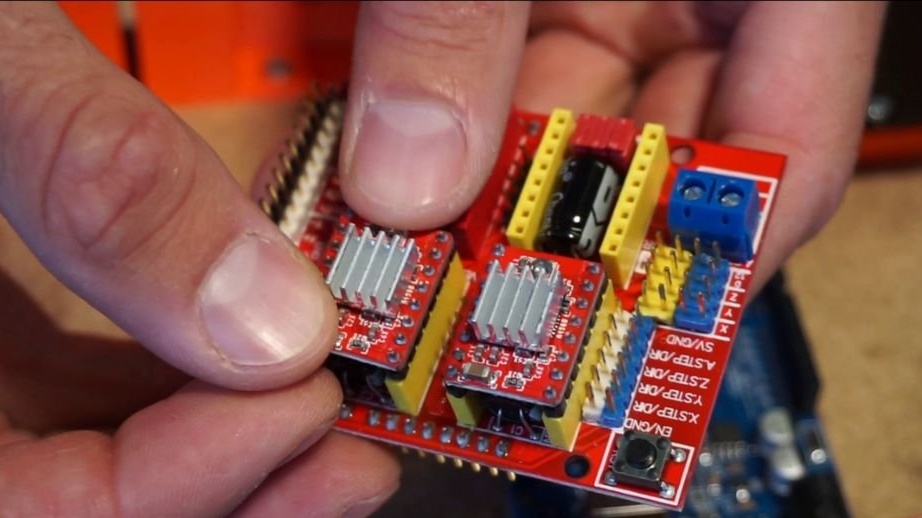
שנית אלקטרוניקה על הבקר להיות מחובר. המאסטר משתמש ב- UN Arduino הקלאסי עם CNC ושני נהגי מנוע צעד A4988. מנוע ההזנה מחובר לציר Z, ומנוע ראש הכיפוף לציר X. הנהגים מוגדרים לרמת הדיוק הגבוהה ביותר האפשרית - כל 3 המגשרים שמתחת לנהגי המדרגות מוכנסים. הכל צריך להיות מחובר לספק 12V 3A.

שלב שמונה: קושחה
עכשיו אתה יכול לנסות להפעיל את המכונה. המאסטר משתמש GRBL יחד עם cncjs. הם נועדו לעבוד על מכונת כרסום, אך עובדים מצוין לכל סוג של CNC. GRBL היא הקושחה שעליך להתקין ב- Arduino UNO. יש לקוח אינטרנט cncjs טוב להגדרת פרמטרים. התקן GRBL על Arduino ו- cncjs במחשב שלך.
לאחר ההתקנה, עליכם להתחבר למכונה ולבדוק את פעולתה על ידי לחיצה על הכפתורים Z +/- או X +/-.
עכשיו אתה צריך לכייל: 10 מ"מ = Z10 $ 102 = 34 $ 110 = 1600 $ 111 = 600 $ 112 = 1000 $ 120 = 500 $ 121 = 350 $ 122 = 350
זוהי מערכת ערכים שקובעת כיצד להמיר את המספר המצוין בקוד לתנועת מנוע. לדוגמה, אם תגדיר את ציר ה- Z ל -30, זה בעצם אומר שהוא ידחוף 30 מ"מ תיל דרך המזין.
חישבנו את הכיול, עכשיו עליכם לכוון את ראש הכיפוף למצב האפס.
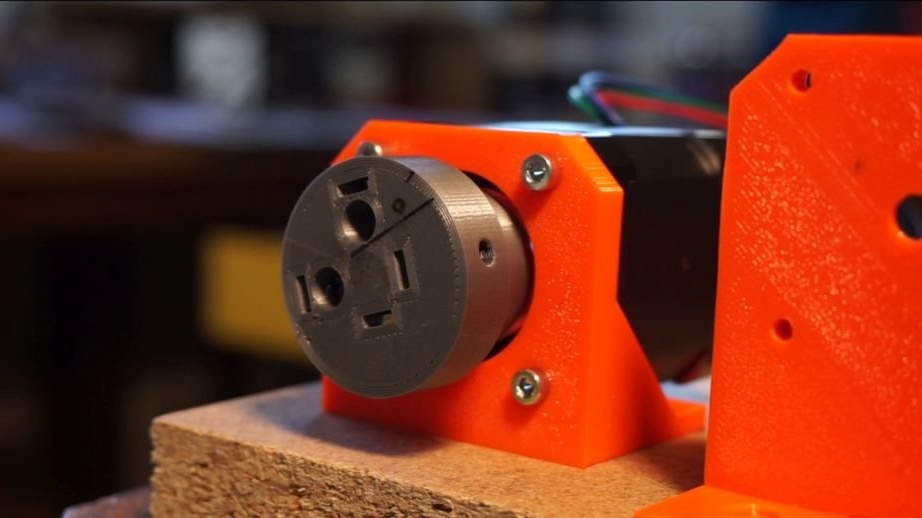
תנועת ראש הכיפוף נקבעת על ידי המיקום הקבוע הידוע של ראש הכיפוף. במקרה זה, זו המיקום בו סיכת הכיפוף בראש פונה שמאלה. ראו את התמונה.
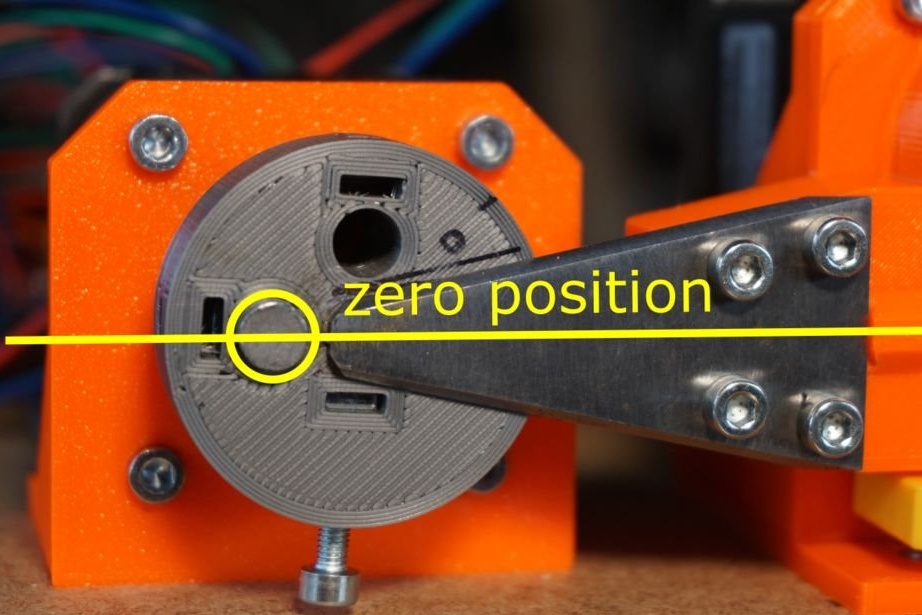
רצוי לציין את עמדת האפס הזו על הראש כדי להיות מסוגלים להחזיר אותה לאותה תנוחה. אין צורך שמנגנון ההזנה יקבע את מיקום האפס מכיוון שהוא תמיד נע יחסית למיקום הנוכחי.
עכשיו בואו נראה דוגמה של Gcode. זה נראה כך:
G91
G1 Z1
G90
G1 X2
G1 X-6והנה בשביל מה כתוב כל ערך:
G91 - השתמש בקואורדינטות יחסית (נדרש לפני כל תנועה בציר Z)
G1 Z1 - הזנת חוט בקוטר 1 מ"מ
G90 - השתמש בקואורדינטות מוחלטות (נדרש לפני כל תנועה לאורך ציר ה- X)
G1 X2 - סובב את ראש הכיפוף למצב 2 (למספר זה אין יחידות)
G1 X-6 - סובב את ראש הכיפוף למצב -6
אם תחזור על הצעדים 100 פעמים תקבל קוד כיפוף קפיץ. להלן קובצי מקור נוספים.
hex-inner.gcode
hex-outdoor.gcode
spring.gcode
המכונה מוכנה. אבל המאסטר עדיין יעבוד על שיפורו.
את כל התהליך של ייצור מכונה כזו ניתן לראות בסרטון.