

קוראים קשובים שמו לב כי במאמרים הניתנים להנחיות תחת הכינוי WilkoL אודות מזלג כוונון ושעון עם השימוש בו, מוצג מד תדרים אחד בלבד, ובמאמר על גנרטור עם זכוכית כאלמנט להגדרת תדרים, נוסף לו שני, והוא אפילו עלה על KDPV. הסיפור הזה הוא עליו.
אני שמח לעבוד תוצרת בית המאסטר מתחיל בלימוד החלק התיאורטי, כלומר בבחירת שיטת מדידת התדר. במוני תדרים רבים מספר התקופות של אות הקלט לפרק זמן מסוים, נניח שנייה אחת, נספר עבור זה:
שיטה זו טובה לתדרים גבוהים מספיק, אך אם התדר נמוך היא אינה מאפשרת להשיג מספר גדול מספיק של מקומות עשרוניים. לדוגמה, אם מחזור המדידה אורך שנייה, אז לתדירות בסדר גודל של 50 הרץ יהיו אפס מקומות עשרוניים. אתה רוצה, למשל, שלושה שלטים - יש דרך החוצה, אנו מאריכים את מחזור המדידה ל 1000 שניות. אבל זה דבר אחד כאשר המחשב או הטלפון החכם מאט, שכולם לפחות רגילים אליו, וזה דבר אחר לגמרי - אם מד תדרים יצטרף גם לחברה המהנה הזו, זה בסופו של דבר יהפוך את המשתמש למטורף. באופן כללי יש צורך בדרך אחרת. אבל מה אם נמדוד את תקופת התנודות, ככה?
אז גם כן. הם לוקחים איתות של תדר ההתייחסות, שהוא מספר סדרי גודל הגבוהים מזו שנמדדה, ושוקלים כמה תקופות של אות ההתייחסות יעברו בתקופה אחת מזו שנמדדה. כך, למשל, בתדר התייחסות של 10 מגהרץ ונמדד ב 50 הרץ, זה יהיה 200,000. פירוש הדבר שהתקופה היא 20,000.0 ms, ובקר מיקרו מודרני (ואגב, לא מאוד), אם המתכנת "מלמד" את זה, עם מחושב מחדש בקלות את התקופה לתדר השווה ל 50,000 הרץ. אם התדר גדל ל 50.087 הרץ, אז בתקופה אחת של אות הקלט, 199650 תקופות של המופע לדוגמא, ושינוי כזה מד התדר יבחין בזמן אמת.
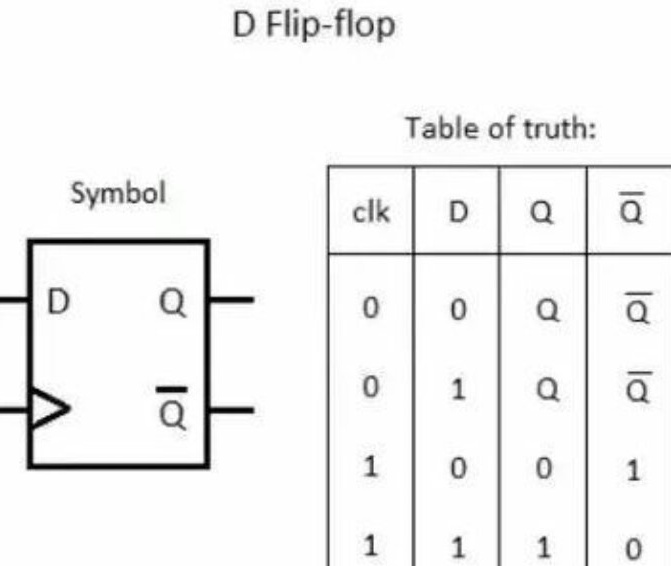
אבל עם שיטת מדידה זו, מספר המקומות העשרוניים, להפך, פוחת עם התדירות הגוברת של אות הקלט. לדוגמה, אם הוא 40 קילו הרץ, וההתייחסות היא עדיין 10 מגהרץ, אז ב- 40-161 הרץ נקבל 249 תקופות של תדר ההתייחסות, וב 39840 הרץ - 251 תקופות. שני מטר תדרים לפחות הם בסדר: אחד לתדרים גבוהים, הפועל בדרך הראשונה, השני לתדרים נמוכים, בשני. אם כי - המתן! האם לא ניתן לשלב את שתי השיטות במד תדר אחד? אתה יכול, והמאסטר מספר איך. אתה צריך לקחת טריגר D רגיל, ואז הסמל שלו וטבלת האמת ניתנים:
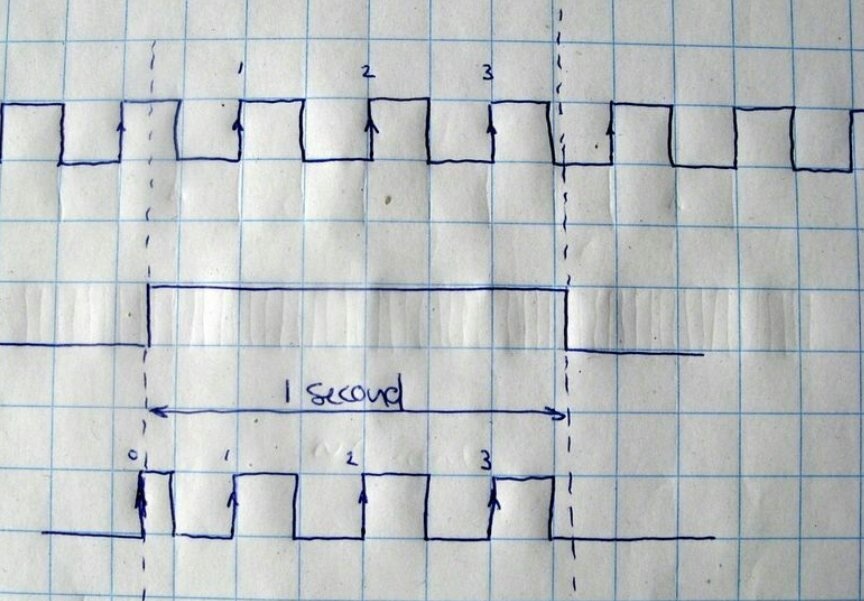
האשף מציג ארבעה אותות בתרשים, כאשר הרביעי מהם מפיק טריגר:
הראשון מאותות אלה הוא התדר שנמדד, הוא מוזן לכניסת השעון של ההדק D. השני הוא תדר התייחסות, למשל, שוב של 10 מגהרץ, הדורש יציבות גבוהה. השלישי הוא אות בתדר בסדר גודל של 1 הרץ, שיציבות ממנו אינה נדרשת כלל, הוא מוחל על אותו טריגר בכניסה D. ובכן, הרביעי נוצר על ידי ההדק מהראשון והשלישי כדלקמן. כאשר האות השלישי עובר מאפס לאחד, ההדק לא מגיב לכך מייד, אלא רק כאשר מתג כזה מתרחש עם האות הראשון שאחריו. לפיכך, חזית אחד הפולסים של האות הרביעי עולה בקנה אחד עם חזית אחד הפולסים של הראשון. ואז האות השלישי, ואחריו הרביעי, עובר לאפס, שהמיקרו-בקר אינו מגיב אליו בשום דרך, ואז האות השלישי עובר חזרה לאחד, אך ההדק לא מגיב אליו שוב מייד, אלא רק אחרי אותו מיתוג של האות הראשון. ושוב, חזיתות האותות הראשון והרביעי חופפים לחלוטין. ובתקופה המלאה של האות הרביעי מתאים למספר שלם של תקופות מהראשון. בהמשך - עניין טכני: אל תשכח שיש לנו גם איתות שני. בקר המיקרו מחשב כמה תקופות מלאות של האות הראשון והשני נפלו בתקופה המלאה של הרביעית.
אז יש לנו שני מספרים. לדוגמה, 32 ו- 10185892. הכפלו 32 על 10,000,000 (תדר הפניה) וחלקו על ידי 10185892. נקבל 31.416 הרץ. שלושה מקומות עשרוניים. והמדידה נשארת מדויקת הן בתדרים נמוכים והן בגובה המתקרב לדגם. ואם אתה צריך למדוד תדרים גבוהים אפילו יותר, אתה יכול להוסיף מחלק.
כעת עלינו להחליט איזה מיקרו-בקר יפעיל את מד התדרים. המאסטר כבר ניסה לייצר אותם ב- ATmega328, ואפילו על STM32F407, כשהם פועלים בתדר שעון של 168 מגהרץ. אבל הפעם הוא חדור מינימליזם ומחליט לבדוק אם הוא יכול להשיג תוצאה דומה ב- ATtiny2313.
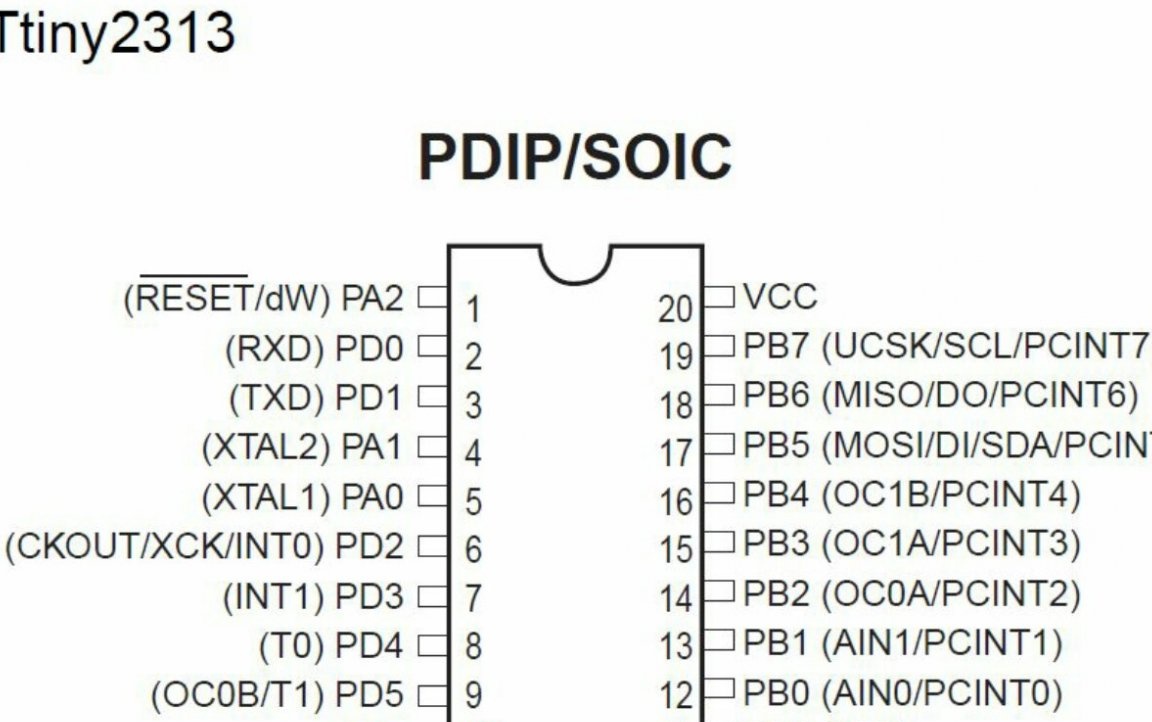
יש לו מספיק מסקנות, במיוחד אם אתה משתמש בתצוגת LED עם שבב נהג מובנה כמו MAX7219:

תרשים מכשירים שלם נראה כך:
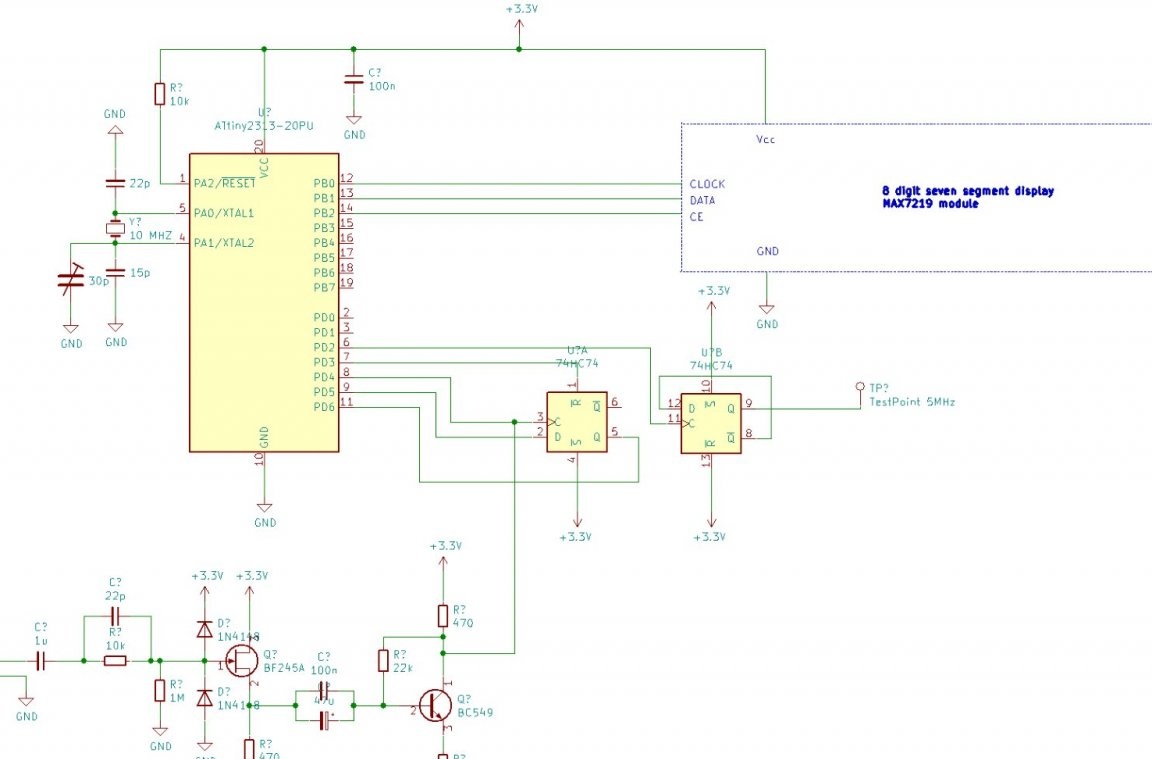
נהג מורכב למדי לרכיבים בדידים, המכיל מעגלי RC, מגביל דיודות, ושלבי מגבר, משמש להשגת פולסים מלבניים מאותת כמעט בכל צורה. ההדק D ממוקם בחוץ, אות התדר הנמדד (הראשון) מועבר אליו מהנהג, אותות עם תדרים של 10 מגהרץ ו- 1 הרץ (שנייה ושלישית בהתאמה) מתקבלים מהמיקרו-בקר, אות הפלט (הרביעי) חוזר למיקרו-בקר. ההדק השני מסוג זה משמש ליצירת אות בנקודת בקרה. אותה ערכת PDF בארכיון ZIP זמינה. כאן.
לאחר שלחן תרשים, המאסטר אוסף עליו מד תדר, מסתבר כך:
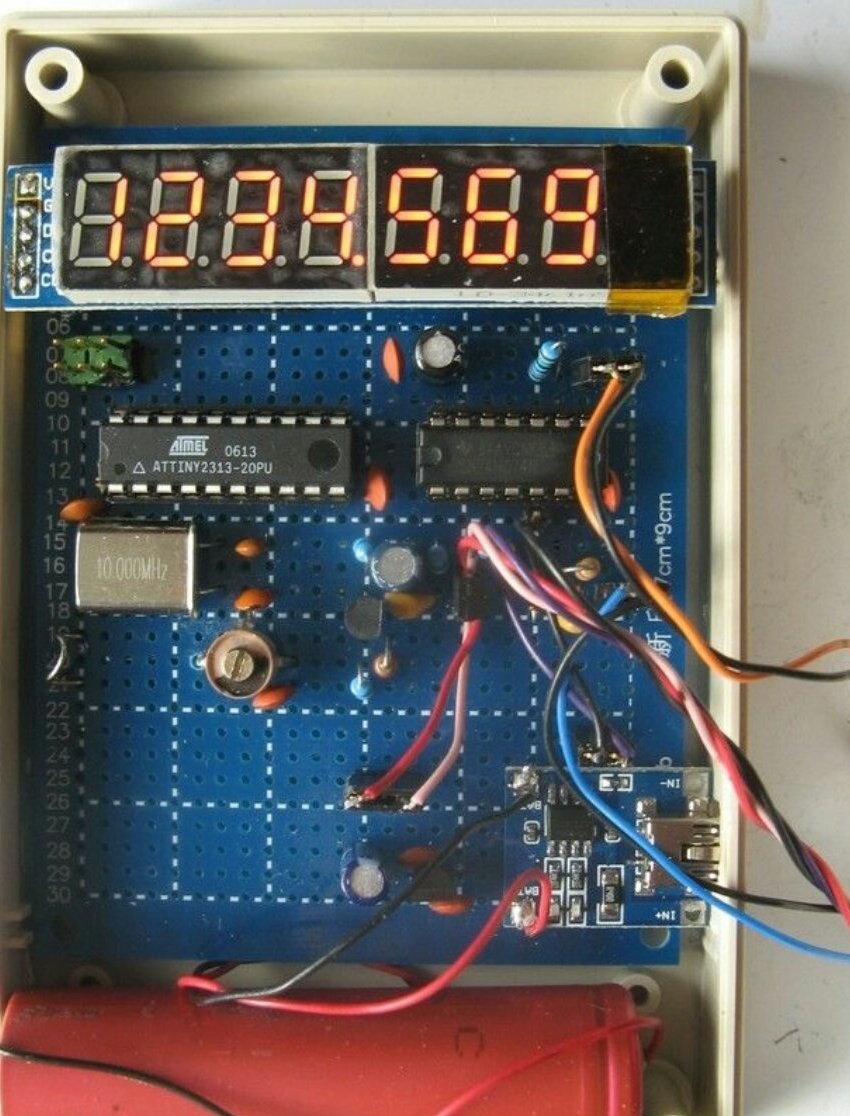
בתמונה, שלא כמו במעגל, מוצגים הסוללה ובקר הטעינה, מייצב הדופק מוזכר גם על ידי המאסטר, אך איפה שהוא נמצא, הוא אינו נראה לעין. כל הרכיבים הללו נוספו בהמשך, מה שהפך את העבודה עם מד התדרים לנוחה יותר. יש לקחת סוללה 18650 עם הגנה, חוטי הלחמה אליה אינם מקובלים. או את התא או ריתוך כתמים.
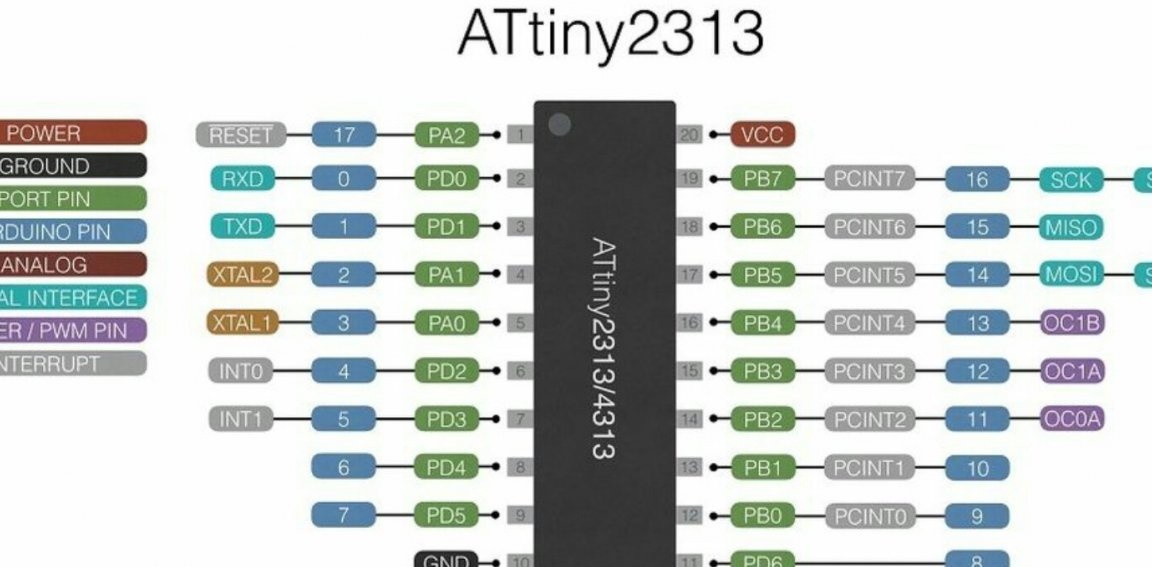
קושחה (שקרים כאן גם בארכיון ה- ZIP) המאסטר כותב תוך התחשבות בצורך להעביר את המיקרו-בקר מהשעון לגנרטור ה- RC לעבודה מקוורץ חיצוני, כמו גם את האפשרות להקצות פונקציות שונות לכל אחת מפלטות המיקרו-מעגל:
כדי להעלות את הקושחה, האשף לוקח מתכנת מעגל מבית Olimex. מדובר בחברה בולגרית עם פרופיל קרוב לאאפרויט.

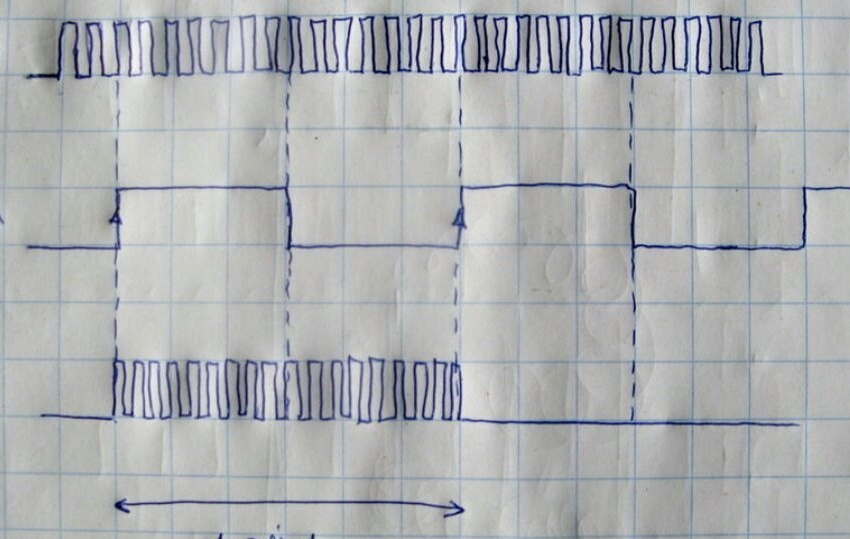
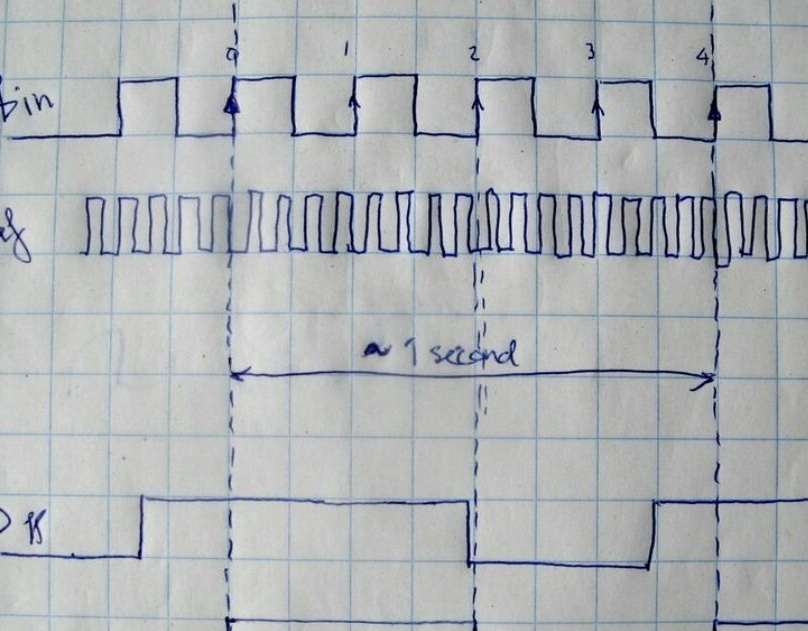
המאסטר אוטם את הפריקה הקלה בתצוגה ואז חותך חור בכיסוי הדיור כך שפריקה זו סגורה, מכיוון שקריאותיה לא היו מדויקות למרות כל האמצעים שננקטו.זה מושפע מתכונות האלגוריתם, ולא מיציבות טמפרטורה גבוהה מדי של מתנד הגביש. לצורך התקנתו, המאסטר מחבר מד תדר חיצוני לנקודת הבקרה תוך ייצוב תדר של מחולל השעון ממקלט ה- GPS, לאחר מכן הוא מגדיר את 5 MHz המדויקים על ידי סיבוב של קבל הכוונון (ההדק מחלק את תדר השעון בשניים). מד תדרים מכוון נכון מספק את הדיוק הנדרש בטווח התדרים שנמדד בין 0.2 הרץ ל -2 מגה הרץ. שתי התמונות הבאות מראות כיצד המאסטר הפעיל את אותו האות בו זמנית על מדדי התייחסות והתדר:

