
יום טוב לכל החברים היקרים! במאמר של היום אני מבקש להראות לכם רעיון די מעניין תוצרת בית, אותו כמעט כל מי שעשה לפחות מעט יכול לעשות רקמה ומי יודע קצת על ארדואינו.
באופן כללי, היום נעשה פשוט רובוטים שואב אבק קרטון עשה זאת בעצמך. אבל אתה אומר לי, כי כבר אמרתי לך איך להכין מנקה רובוטים בעצמך, ואתה תצדק, אבל שואב האבק הרובוט הזה הוא הרבה יותר פשוט, זול ונוח יותר מקודמו. כן, וזה המודל שונה ונראה טוב יותר, ויש לו אוטומציה מלאה גם על הסיפון. זה מלאכה, לא רק יעזור להעביר את הזמן, אלא גם יהפוך לעוזר חיוני בבית או בסדנה שלך. בקיצור, הדבר מועיל ולא מסובך.
ובכן, די בהקדמה הארוכה, בוא נלך!
וכך, למוצר תוצרת בית זה אנו זקוקים:
קרטון גלי (הרבה קרטון)
-
חוטי חיבור
-
-
-גלגלים למנועי הילוכים
נהג מנועים לארדואינו (כותב המוצר הביתי משתמש במנהג דגם, אותו אתה רק צריך להכניס לארדואינו כדי לחבר אותו, אבל אתה יכול להשתמש בנהג שנוח לך, העיקר שהמתח מתאים לתיבות ההילוכים שמתחת למנועים)
-
כובעי בקבוק פלסטיים
- זיפים מטאטא
-מנוע עם מאוורר טורבינה, באופן עקרוני, אתה יכול לעשות זאת בעצמך
רשת פלסטיק
- מיכל קטן
ארגז לשתי סוללות 18650
-
מבין הכלים שנצטרך גם:
ברזל הלחמה
אקדח דבק
סכין משרדי
קו
- עפרונות או טושים
הצעד הראשון הוא לקחת דף קרטון גדול, סרגל ומצפן. אנו מודדים 13 ס"מ עם מצפן ומציירים עיגול על קרטון, שאחריו חותכים אותו. בסך הכל אנו זקוקים לשני עיגולים כאלה:


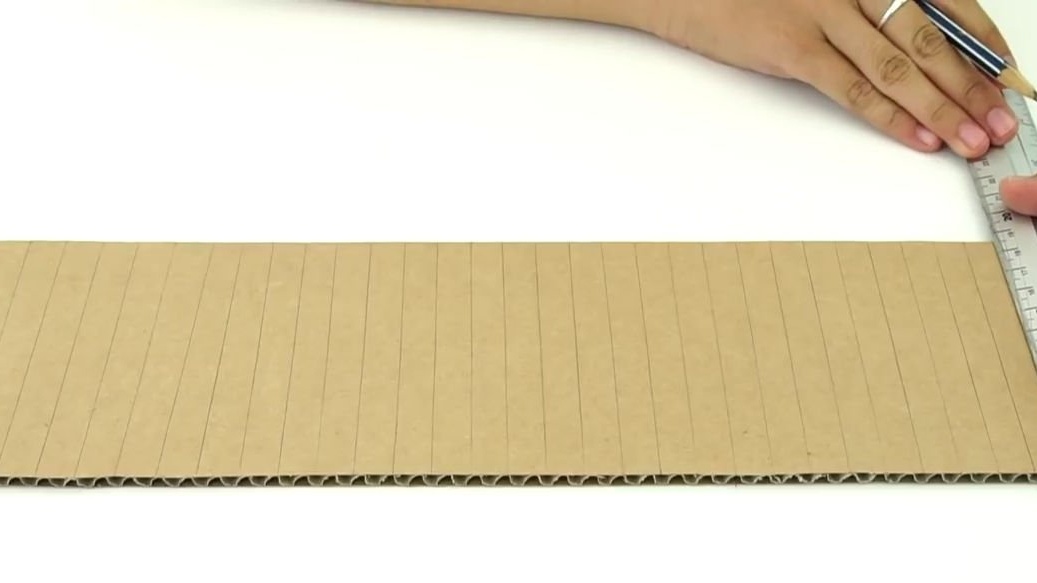
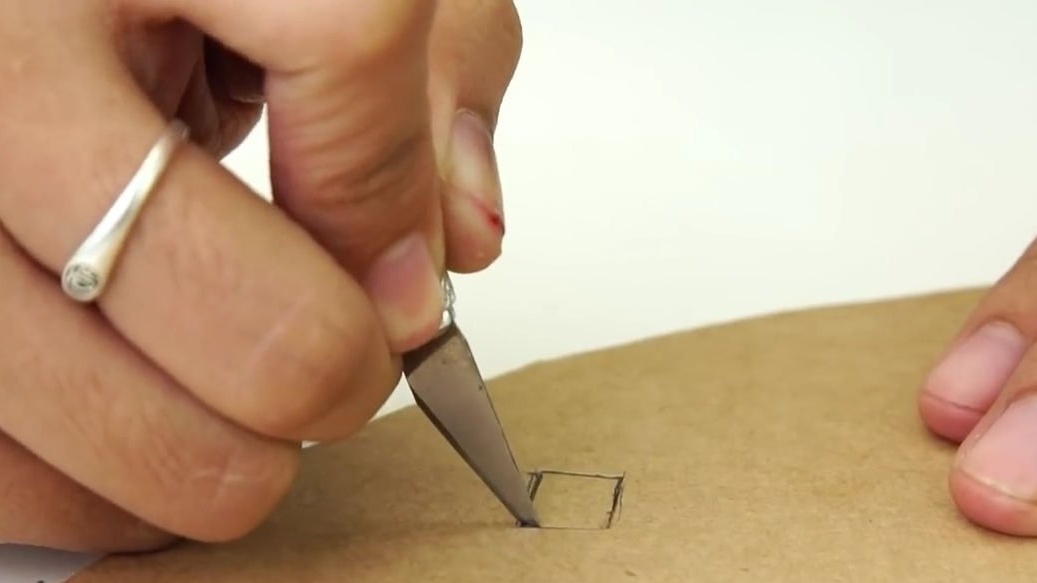
ואז גזרנו מלבן בגודל קטן מאותו קרטון. אנו לוקחים סרגל ועיפרון, בעזרת עיפרון אנו מציירים קרטון עם מרווח של כ- 1 ס"מ. לאחר הליך זה, אנו לוקחים סכין פקידותית ועושים חתכים קטנים משכבת הקרטון העליונה, מבלי לגעת בתחתית. זה הכרחי כדי שהקרטון יהפוך אלסטי יותר:



אנו מסובבים את היצירה המוקדמת שנעשתה סביב אחד מעגלי הקרטון, וכמובן שאנחנו מדביקים אותה עם דבק חם:

בואו נעסוק באלקטרוניקה והחלק המכני.
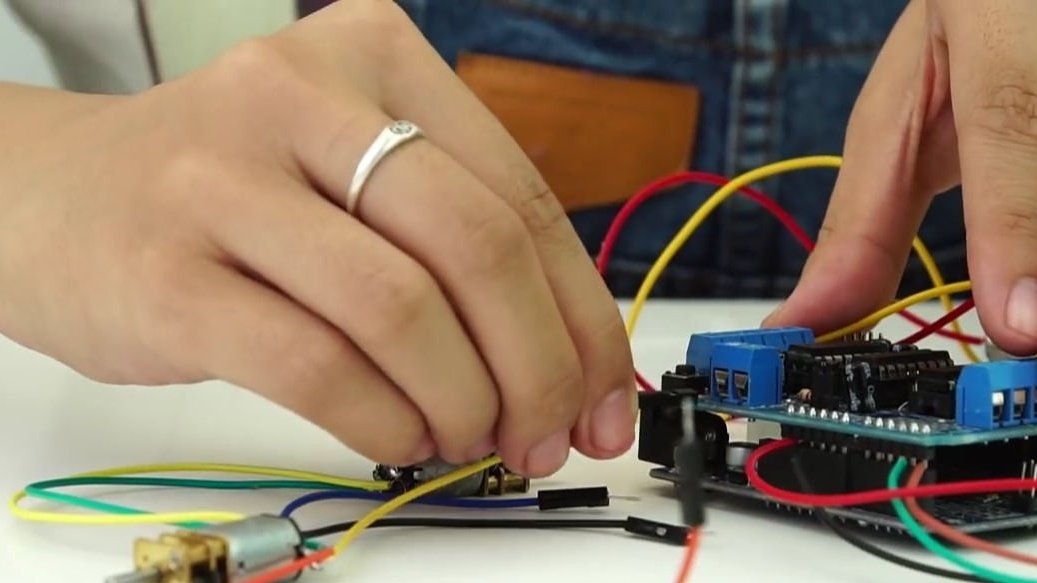
כדי להתחיל, קח את מנוע ההילוכים והניח עליו גלגל, אנו עושים אותו דבר עם המנוע השני:

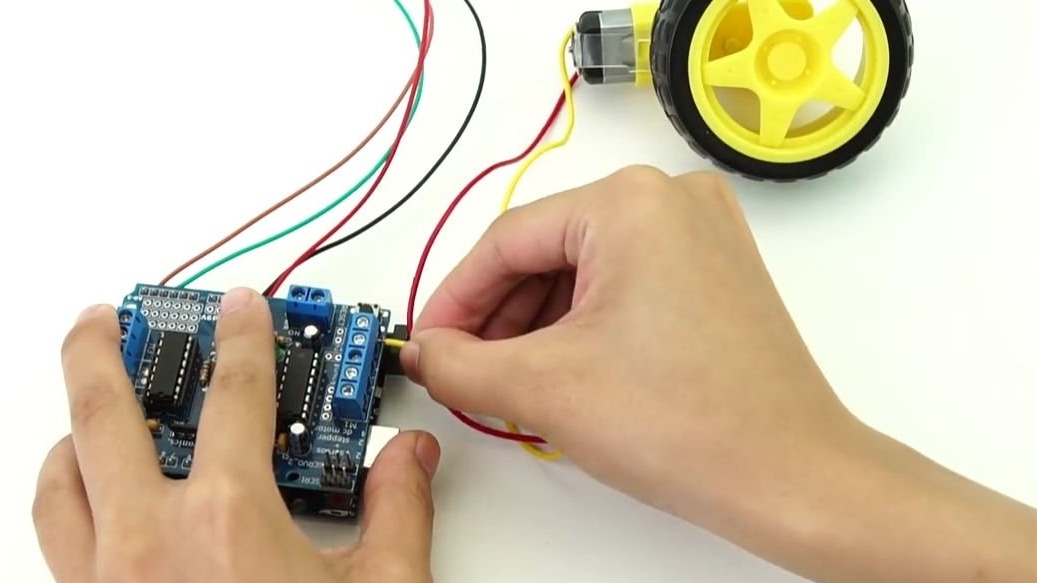
לאחר מכן אנו לוקחים את לוח Arduino Uno וחוטי חיבור, אשר בתורם חייבים להיות מחוברים לפינים (אנשי קשר) מסוימים על הלוח. לנוחיותנו אנו לוקחים צבעים שונים: אנו מחברים אדום ל -5 וולט, שחור ל- GND, והשניים האחרים לשני סיכות שונות. לאילו סיכות לחבר את החוטים, עליך לברר מייד על בסיס הקוד, או לכתוב את הסיכות שאליהן מחוברים החוטים שלך. באופן כללי, אין כאן שום דבר מורכב, אנו מתחברים:

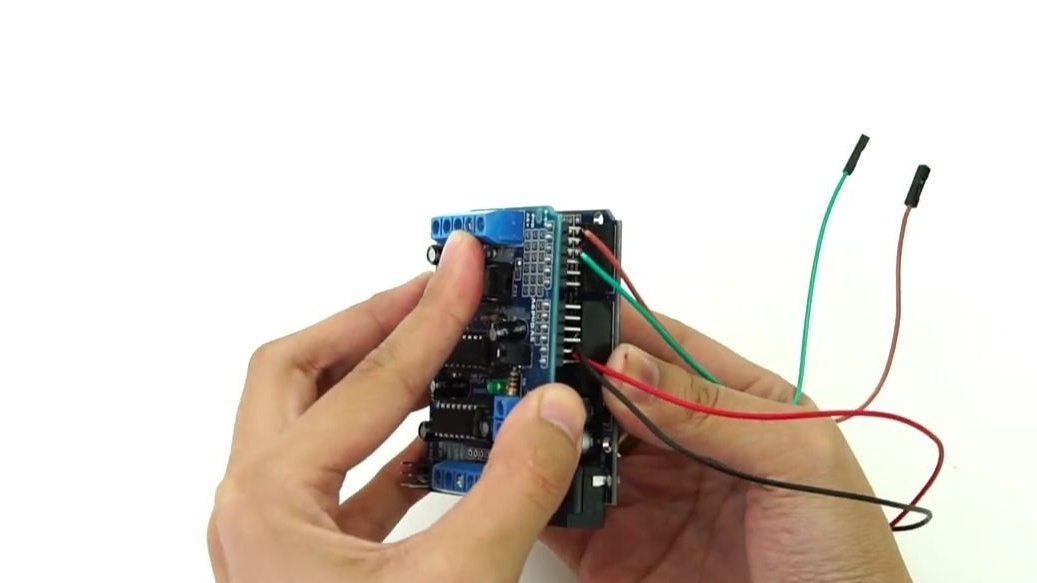
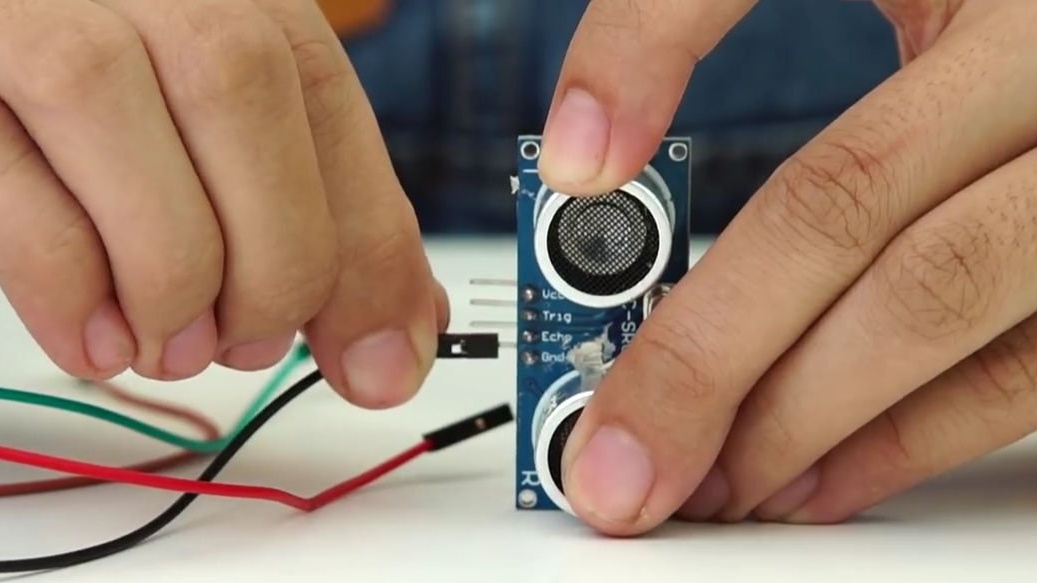
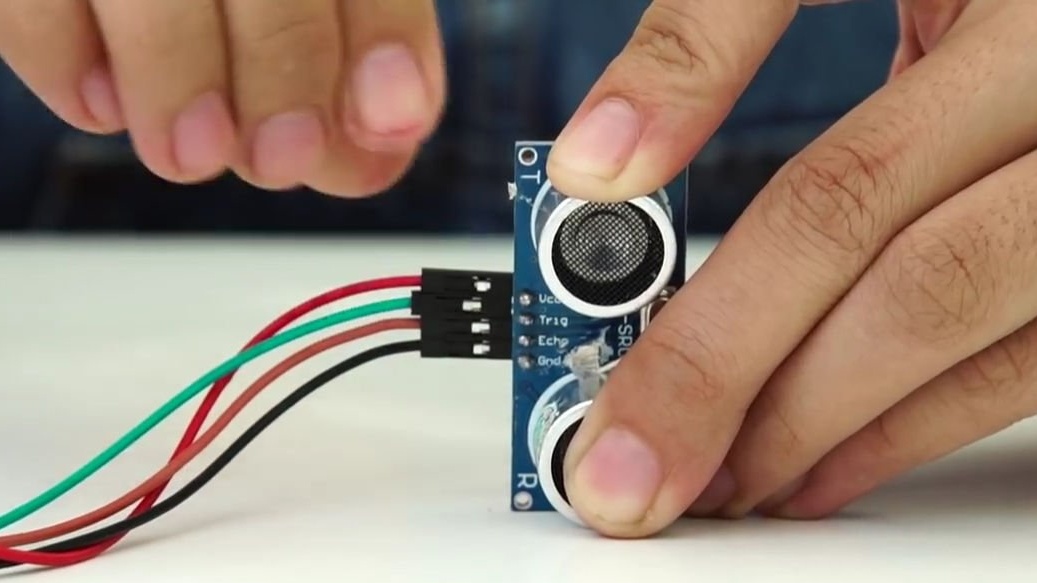
אנו מחברים את הצד הנגדי של החוטים לאיתור טווחי האולטרה סאונד כפי שמוצג בתמונה למטה, אם זה לא ברור, תוכלו לצפות בסרטון של המחבר.
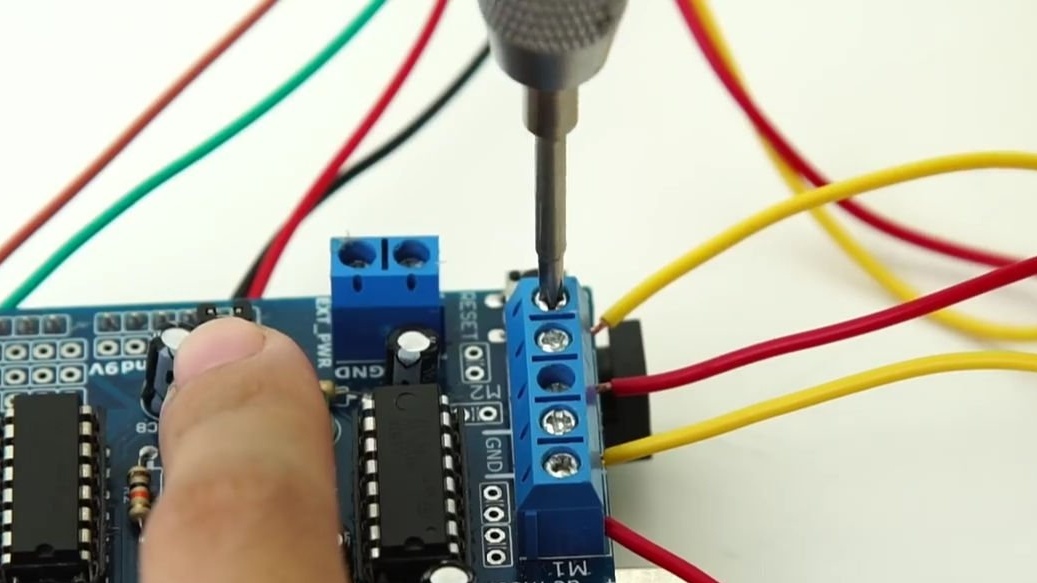
אנו מחברים את מנועי ההילוכים לנהג המנוע, אתה אפילו לא צריך להלחם כלום, פשוט הכנס אותו למתלים וזהו:

יש צורך בהלחמת חוטי החיבור למנועי המיני בעזרתם נחבר את אותם מנועים לנהג המנוע. באופן כללי, אנו מתחברים:
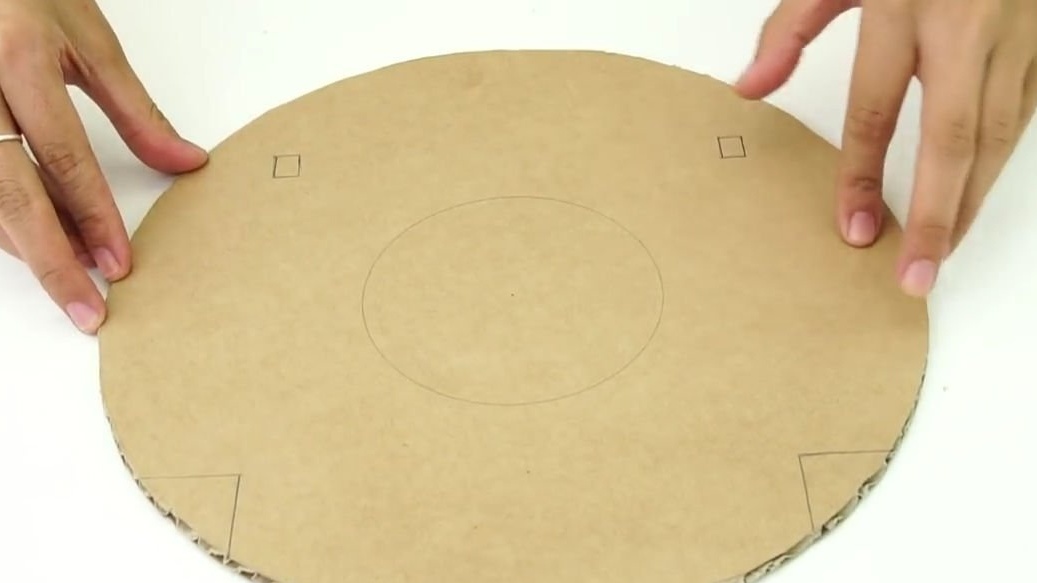
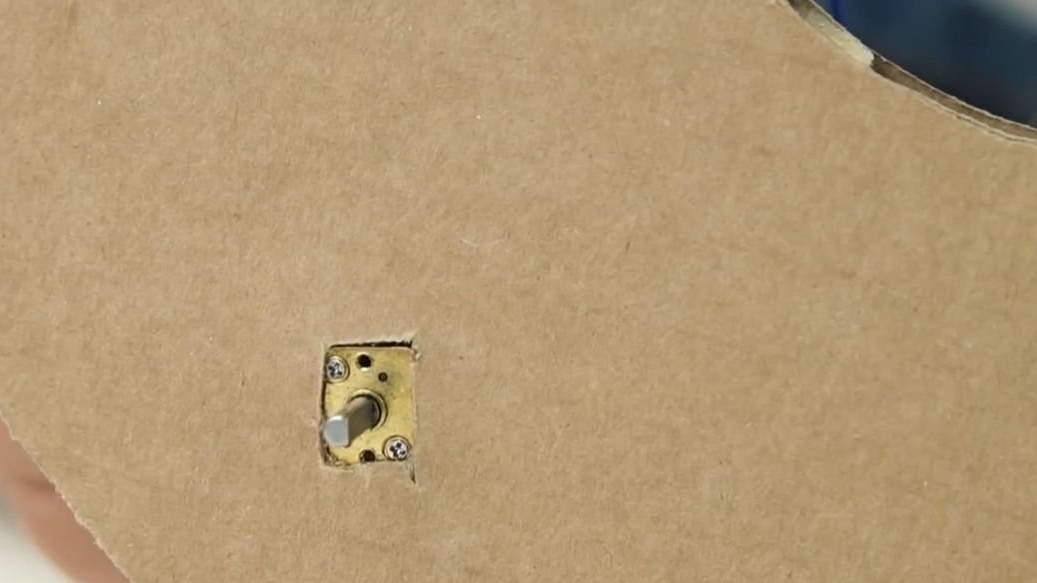
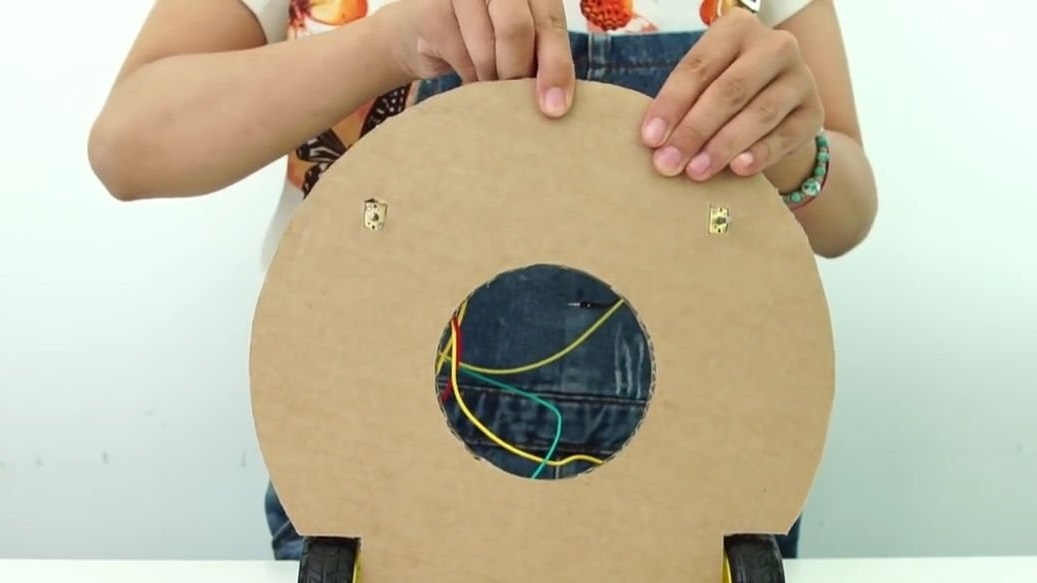
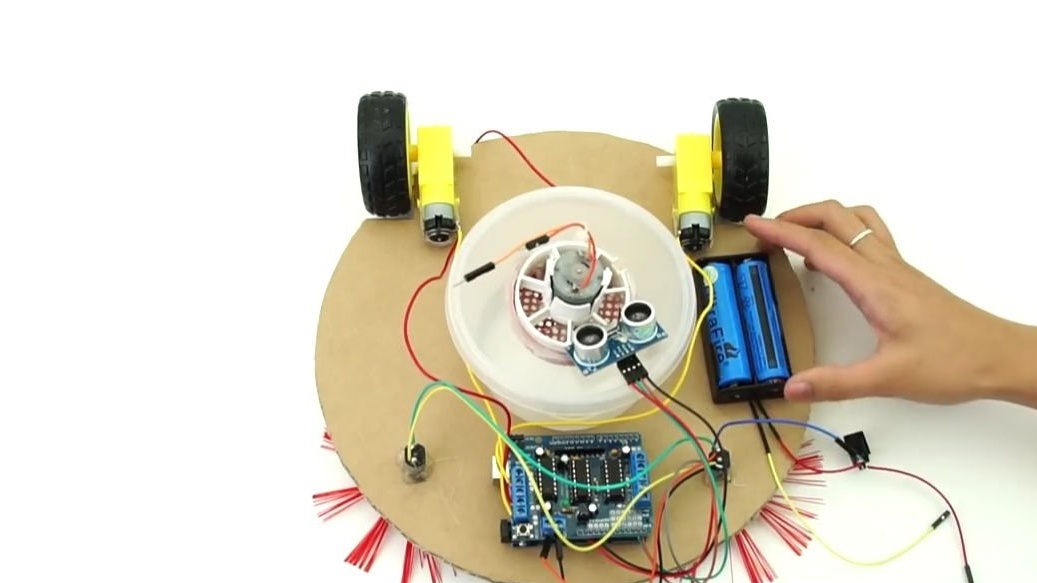
עכשיו אנחנו לוקחים את מעגל הקרטון שנותר, שנעשה ממש בתחילת הדרך. עליו, אתה צריך לצייר מעגל נוסף במרכז וכמה מלבנים. אתה יכול לראות את כל הסימונים בתמונה למטה. ואז חתכנו את החורים המסומנים, זה אמור להתברר כמו בתמונה למטה:

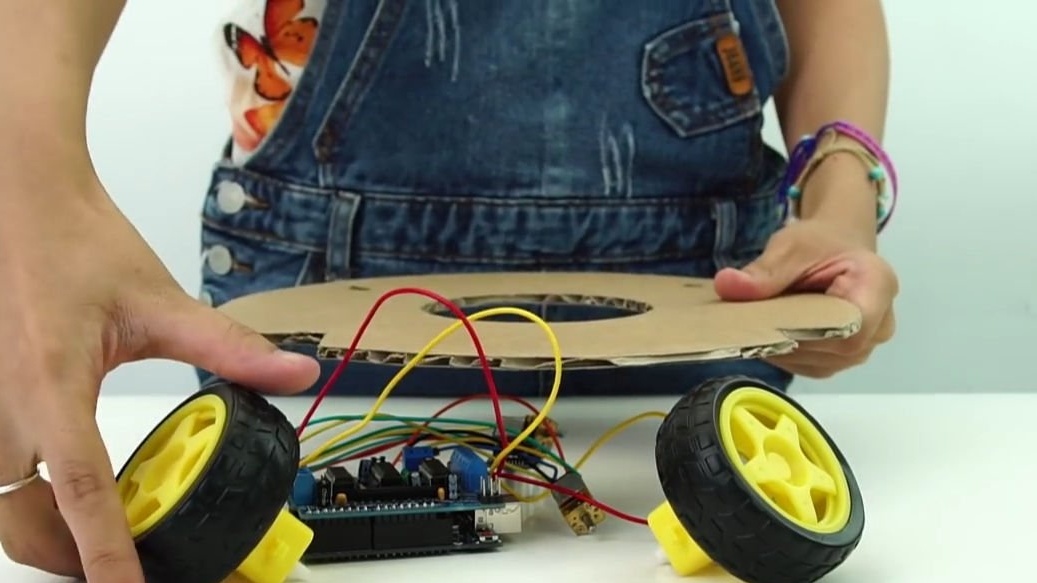
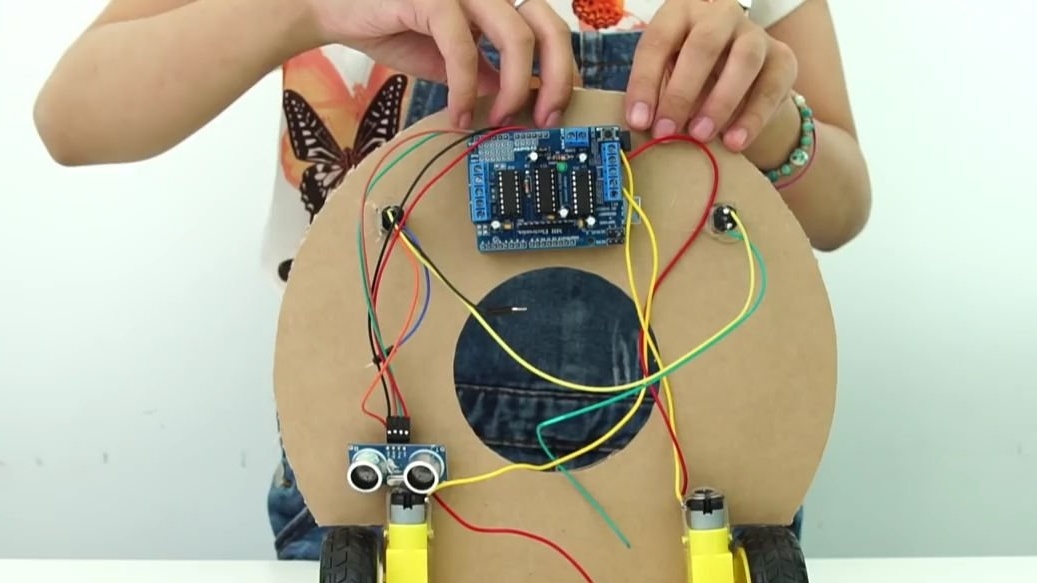
קח את השלם אלקטרוניקה והניחו על עיגול קרטון שנעשה בעבר. אנו מכניסים מנועים קטנים לחורים המלבניים המחוררים, ומהדקים את שאר האלקטרוניקה לדבק חם להמיס, מחברים מנועי הילוכים גדולים במקביל לחלק האחורי, ואינם נוגעים בממד טווח הקולי:

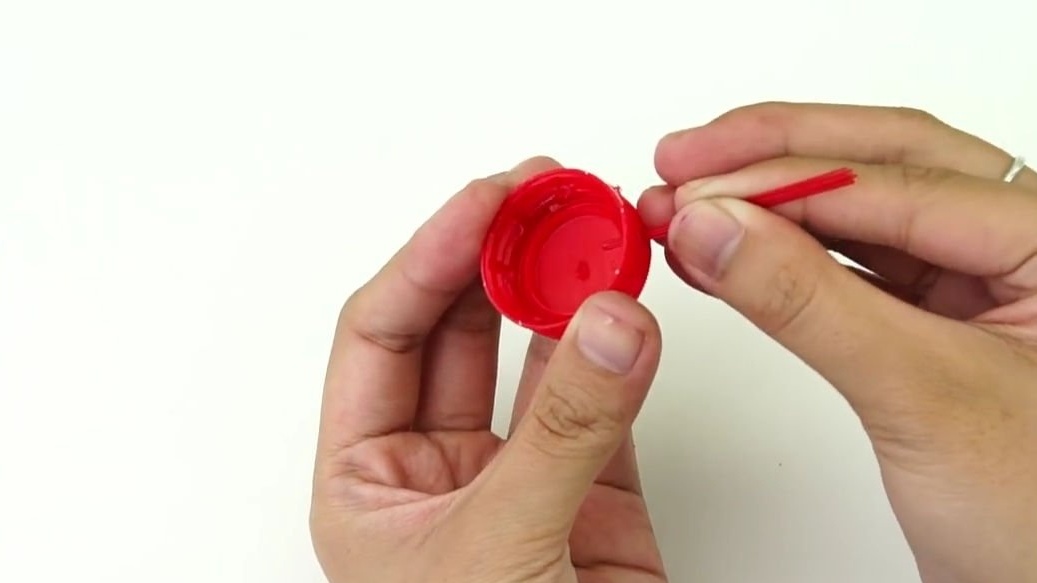
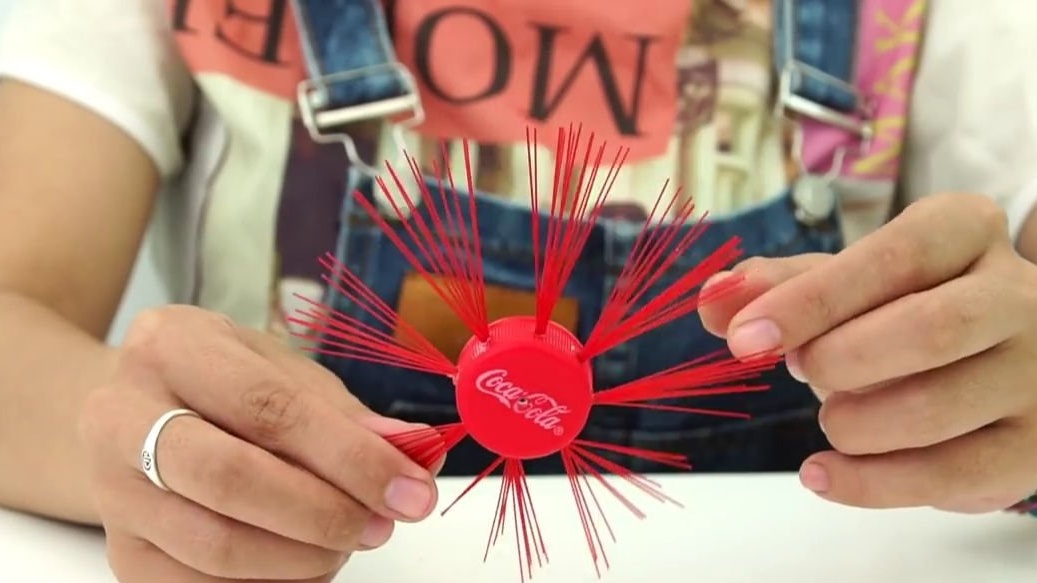
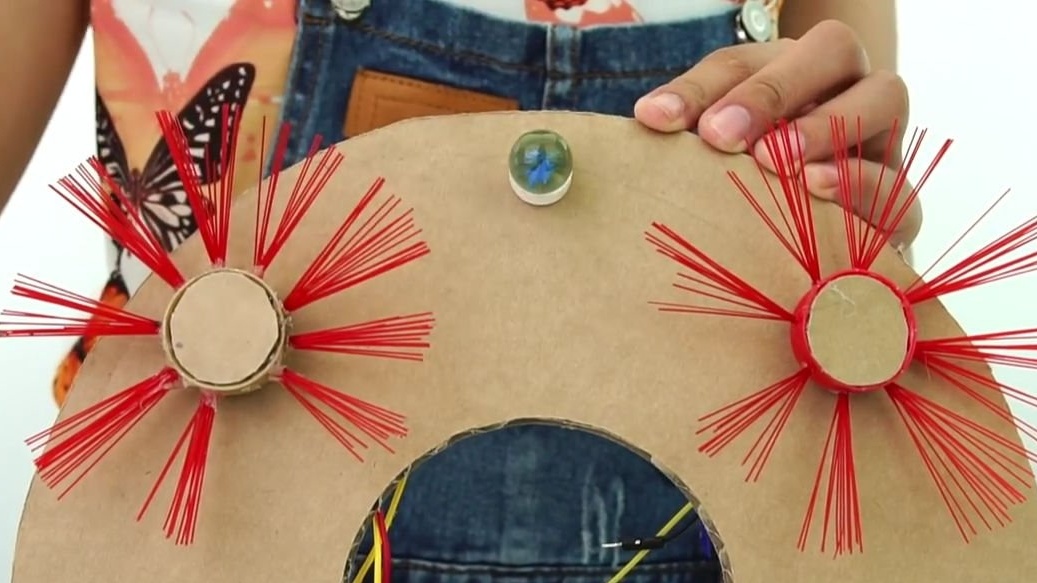
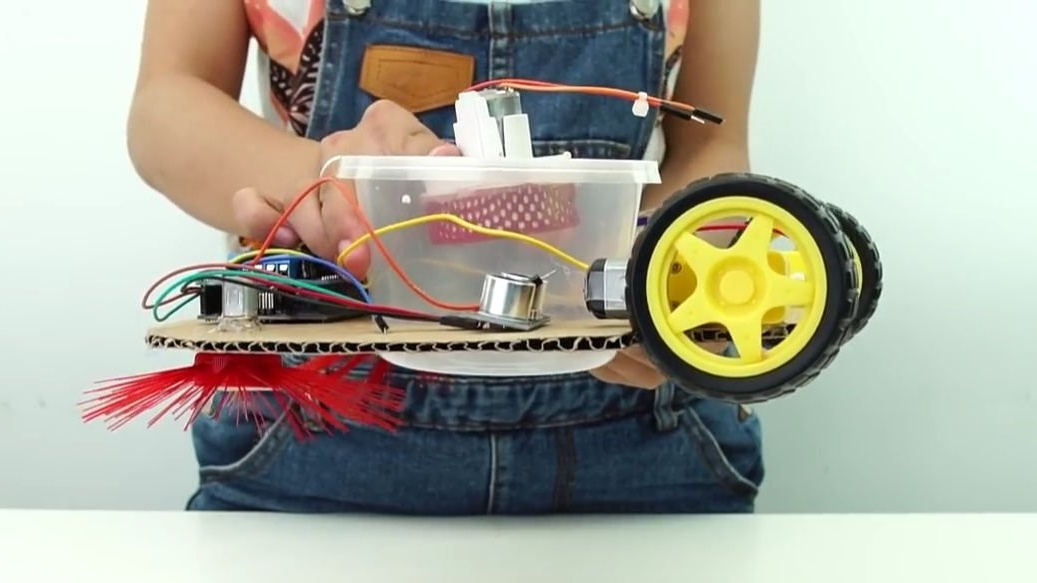
אנו מוציאים את הכובעים מבקבוקי הפלסטיק, אנו זקוקים רק לשני חלקים. בעזרת מגהץ, מסמר לוהט או שרוול, אנו מבצעים חורים: האחד במרכז המכסה, והשני בצדדים עם כניסה של כ -1 ס"מ. בחורים שנעשו בצדדים אנו שולפים את הזיפים שהוכנו בעבר מהמטאטא, הם צריכים להיות בגודל זהה. אנו מקבעים זיפים אלה עם דבק חם. בסך הכל יש ליצור שני ריקים כאלה.
אנו מדביקים אותם על ציר מנועים קטנים, הנמצאים על מעגל קרטון. אנו מדביקים שוב עם דבק חם:


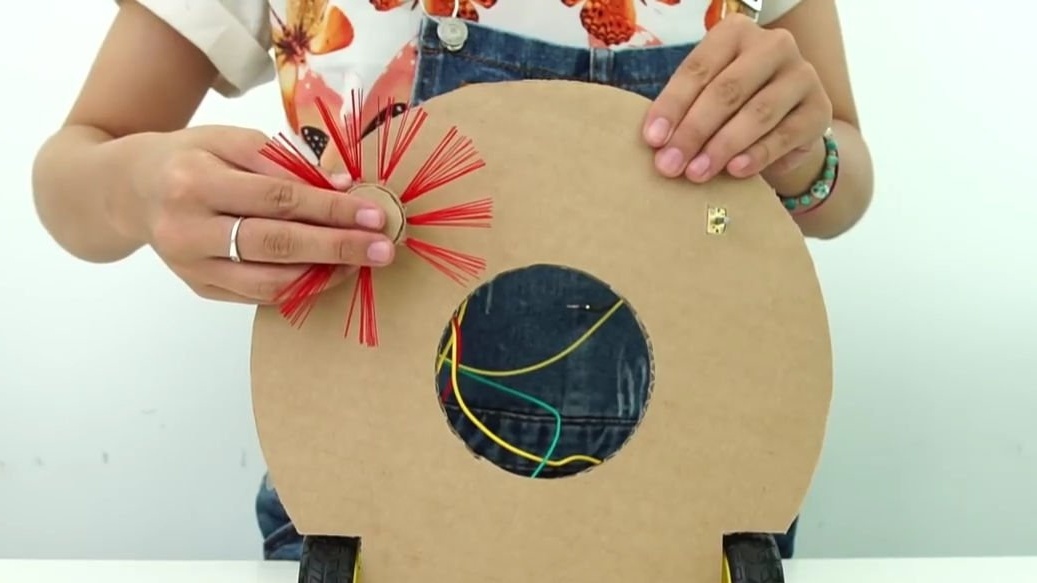

בחזית, בין שתי מברשות, הדבק כדור קטן, או גלגל קטן שיכול להסתובב סביב צירו:
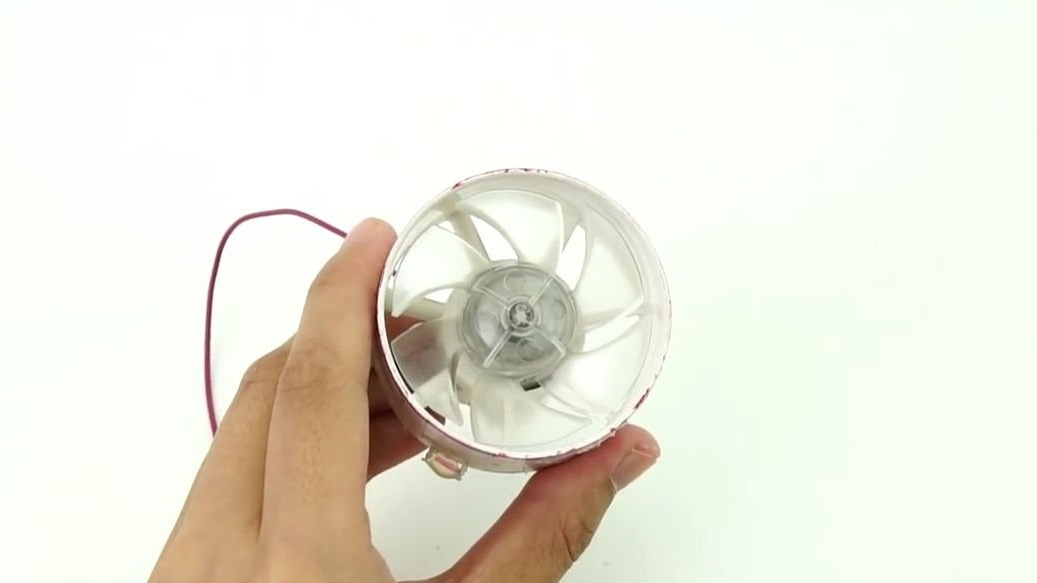
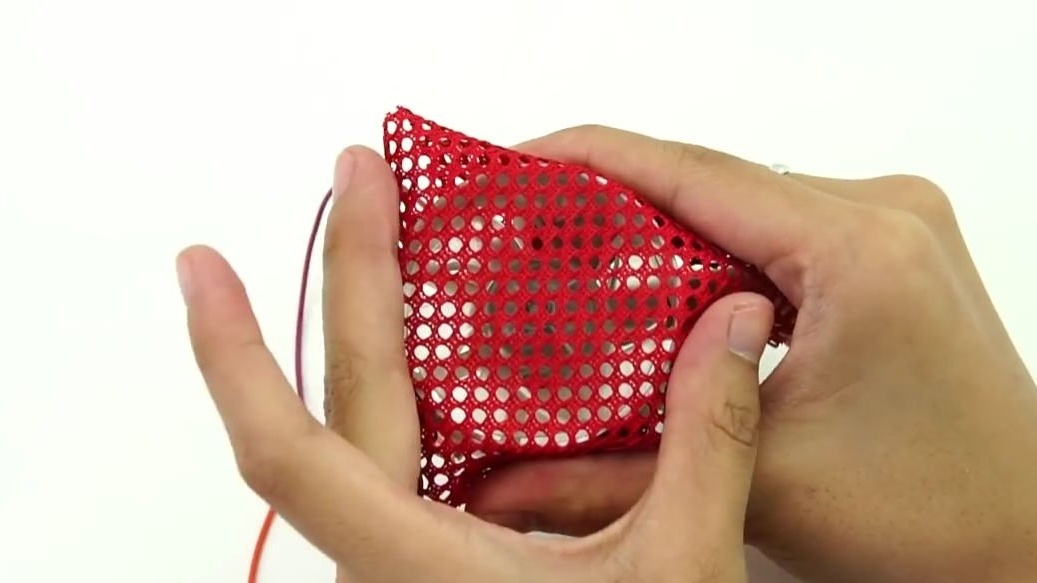
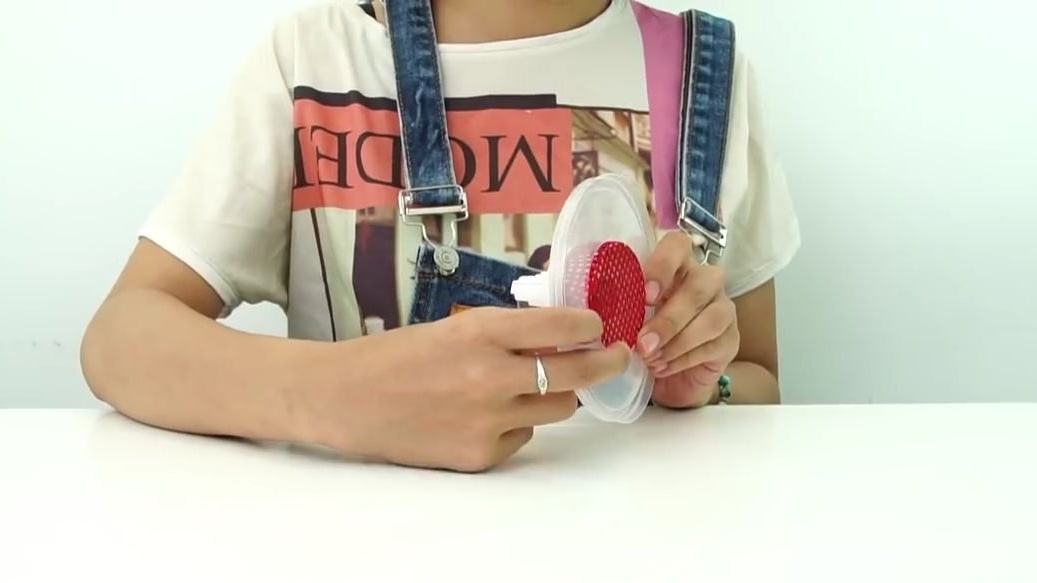
עכשיו אנו זקוקים למנוע חשמלי עם טורבינה שיכול למצוץ אוויר, ובכלל יכול לצנן צידנית מאוד עוצמתית. אנו לובשים ומתקנים רשת פלסטית בחזית הטורבינה, היא נדרשת כדי להגן על הטורבינה, כלומר כדי למנוע כניסה של פסולת גדולה ונפירה החוצה. הסר את המכסה מכלי הפלסטיק. רצוי שהמכל יהיה עגול בצורה. במכסה אנו יוצרים חור עגול ואחיד בו אתה צריך להכניס ולהדביק את הטורבינה עם רשת. במכולה עצמה אנו מייצרים חור מלבני קטן עם הקצה. הנחנו את המכסה עם הטורבינה על המכולה וסיימת. חלק היניקה של הרובוט סיים. אני רוצה להזכיר לכם שצריך לעשות הכל כמוצג בתמונה למטה:



אנו לוקחים את בסיס הרובוט ומתקינים מיכל עם טורבינה בחור המרכזי ומדביקים הכל היטב עם דבק חם. ואז, בצד המבנה, אנו מתקינים תיבה עם 18650 סוללות ומתג המחובר לאחד החוטים המגיעים מהתיבה. אנו מחברים חוטים חדשים להפעלת ארדואינו, אנו מבצעים תספורות סופיות ונוכל להמשיך.
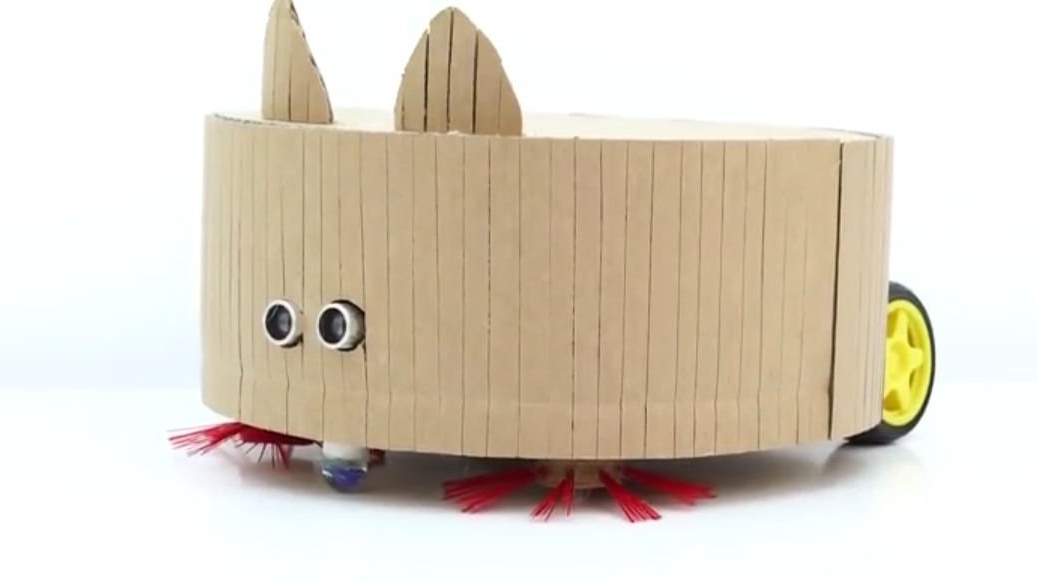
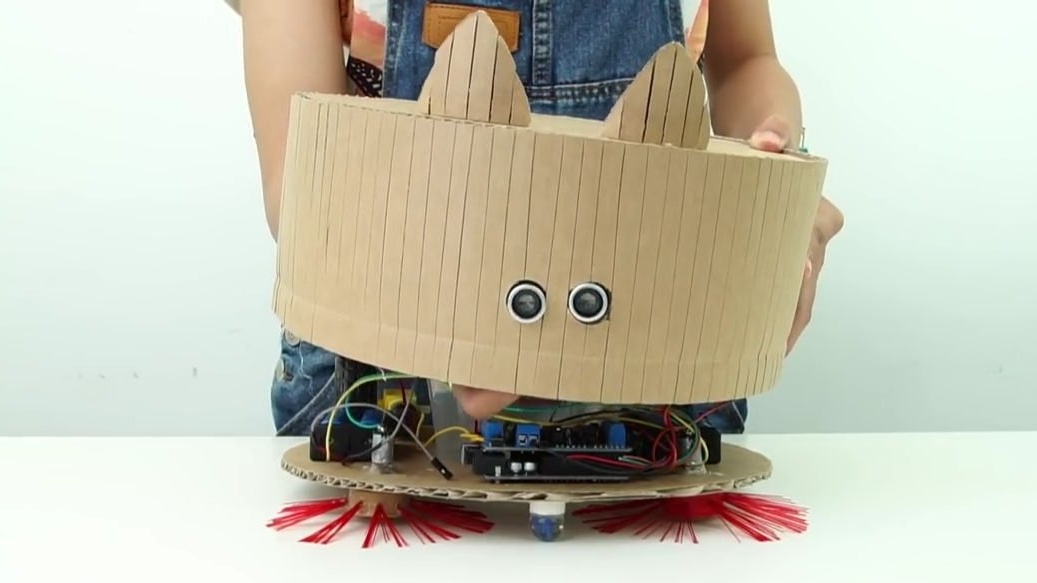
אנו מכניסים את מאתר הטווח הקולי לחורים מיוחדים שצריך לעשות מראש בגוף הרובוט. הבניין הזה, כפי שאתה זוכר, נעשה בראשיתו. כותב המאמר הוסיף גם אלמנטים דקורטיביים בצורת אוזניים ומזין טווח קולי יוצא במקום העין, כל זה נראה טוב מאוד. אנו מניחים את התיק על בסיס המבנה ומתקנים אותו, אך לא כל כך, מכיוון שבמקרה כזה תצטרך להשיג את הסוללות לטעינה.כמובן שתוכלו להתקין דגם לטעינת סוללות ישירות לרובוט, אך אין זה סביר שתחליף טעינה באיכות גבוהה.
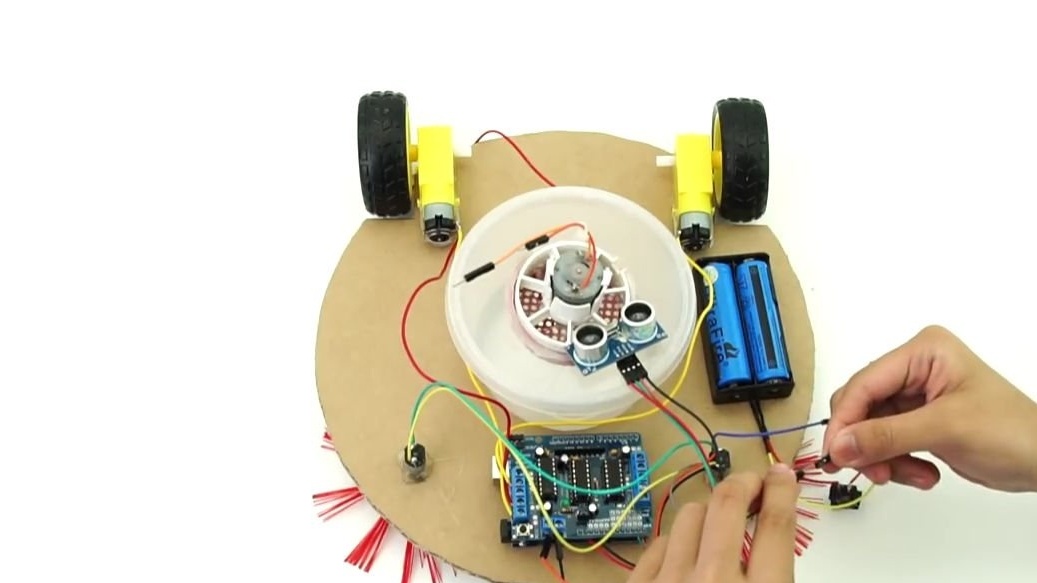

נותר רק להעלות את הקושחה לארדואינו, באופן כללי, עדיף לעשות זאת לאחר חיבור כל הרכיבים האלקטרוניים לבדיקת המעגל והקוד, אך תוכלו לעשות זאת מאוחר יותר. עדיף לכתוב סקיצה למזיגה על ארדואינו בעצמך, אבל אתה פשוט יכול למצוא באינטרנט סקיצה מוכנה לרובוטים עם חיישן אולטרה סאונד אחד שמסתובב במכשול, היתרון של מערכונים כאלה הוא עכשיו שלם. אבל כדי להימנע ממלכודות שונות, עדיף לכתוב בעצמך באופן עצמאי.
ובכן, זהו! שואב אבק רובוט פשוט ופונקציונאלי מוכן ונשאר רק כדי לבדוק אותו! לשם כך, פשוט הפעל אותו והתחל לרכוב על הרצפה ולשאוב את כל האשפה. הרובוט מזיז את עצמו ומסתובב כשהמכשול מתקרב, וזה נוח בהרבה מדגמים קודמים.



הנה סרטון של המחבר עם הרכבה מפורטת ומבחנים תוצרת בית:
אתה יכול גם להעביר את הרובוט הזה מבנק רב עוצמה, אתה יכול לראות את הסקירה המפורטת שלי לטובה, כמובן, שתיהיה מעוניין בכך:
ובכן, כולם בהצלחה בפרויקטים עתידיים, חברים!