

פיתולי איסוף הגיטרה שונים. זכה בפניות פחות - העיוות הוא קטן, אך יתכן שיהיה צורך בקדם מקדים. קדימה אחורה יותר - המשרעת תגדל כל כך שתוכלו להסתדר בלי קדם קדם קדמי, אך העיוות יגבר. בחר טנדר תלוי באיזה פיסת גיטרה חשמלית שתרצה לבצע. וכדי להנחות אוטומציה לסיבובי איסוף מתפתלים תוצרת בית, שהומצא על ידי מחבר ה- Instructables תחת הכינוי TheBigSuleskey.
המכשיר נועד לשימוש במסגרות מוכנות, אך ניתן לבצע אותו מחדש לעבודה עם כל אחד אחר, כולל מודפסים בתלת מימד. החוט המתפתל מתפתל עם הסלילים קבועים על השולחן, עובר דרך הטבעת ומוליך אנכי עם מספר חורים ואז מתפתל סביב מסגרת מסתובבת:

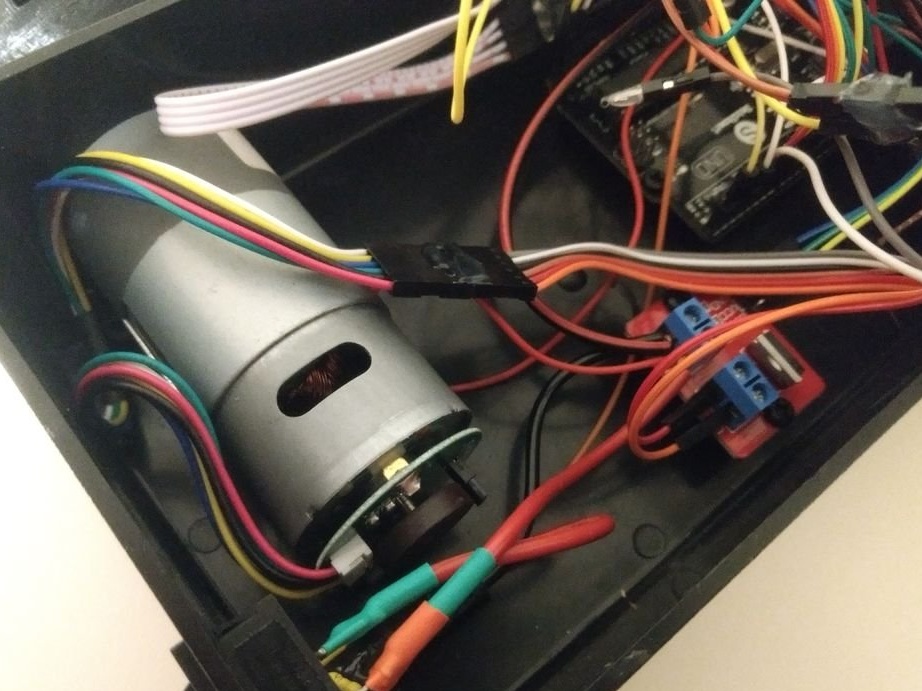
המותח מורכב בתיק PVC בעל מידות 200x120x65 מ"מ עם רגלי גומי. המרכיב המגושם ביותר במכשיר הוא מנוע 12 וולט DC עם חיישן מיקום YC-52010. הוא נשלט דרך נהג הכוח מהלוח ארדואינו Uno או תואם. מידע מוזן מארבעה כפתורים ומתנגד של 10 קילו אוהם, ומוצא לתצוגה בגודל 16x2 עם ממשק טורי. התרשים מציג מודול להמרת תצוגה קונבנציונאלית ב- HD44780 לסדרתיים. אפשר גם להחליף באמצעות Bluetooth דרך מודול HC06, אך זו אפשרות נוספת.
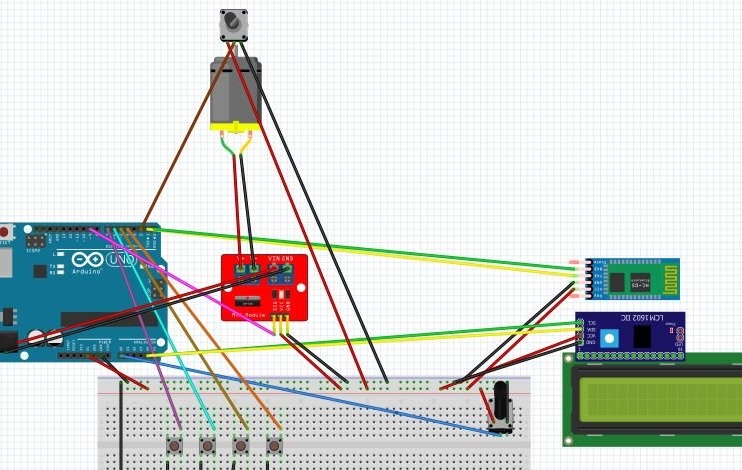
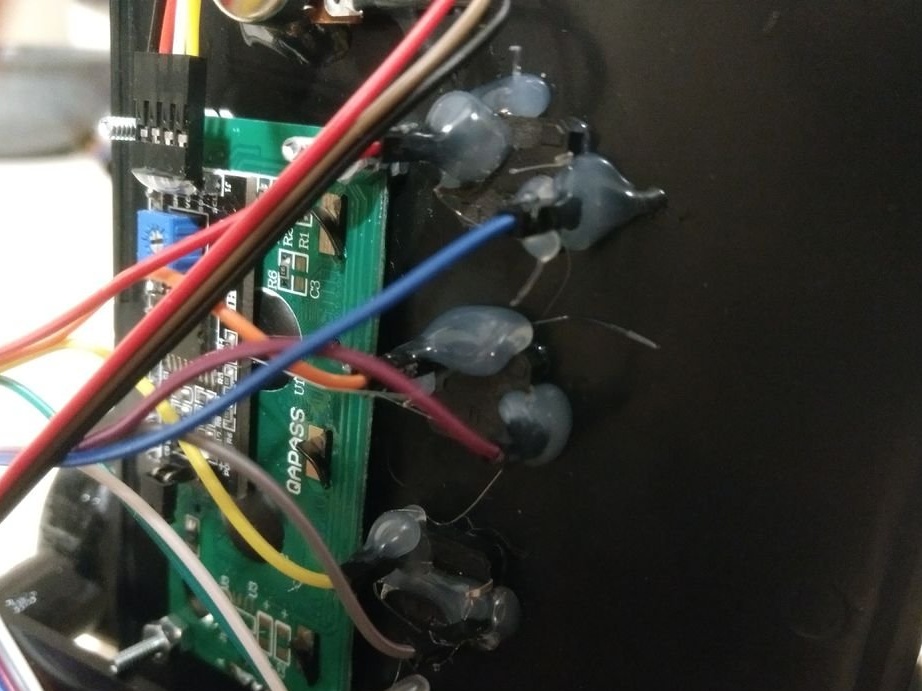
הכפתורים, כשתלחצו, מושכים את כניסות הדיגיטל של ארדואינו לחוט המשותף, יהיה נחמד להסיק את אותן מסקנות עם נגדי הפלוס, זה ישפר את חסינות הרעש, אך TheBigSuleskey לא עשה זאת. הנגד המשתנה מחובר לפלוס ולחוט המשותף עם המסופים הרוחביים, ולכניסה האנלוגית ככזו האמצעית, וכך המתח בכניסה זו משתנה בצורה חלקה מ- 0 ל- 5 V ביחס לחוט המשותף.
הכל מופעל מאספקת חשמל 12 וולט מחברת netbook (מחשבים ניידים לא יעבדו, יש בדרך כלל 19 וולט). מכיוון שה- netbooks אינם נפוצים מאוד כיום, אספקת חשמל לרצועת LED מתאימה, כך שהיא יכולה לתת גם כ -4 A.נתב עשוי לא להיות מתאים, מ- 1 עד 2 A שם, המנוע יכול לעבוד באטיות מרמת שקע. Arduino ונהג המנוע מקבילים (אל תשכחו מהקוטביות), בעוד שכל הרכיבים בלוח Arduino מופעלים באמצעות מתח של 5 וולט באמצעות מייצב המותקן שם. לחלק מהלוחות האם המודרניים התואמים אין מייצב, אז עליכם לחבר את הלוח דרך מייצב ליניארי בשבב 7805 או לוח מייצב דופק (בדרך כלל בשבב MC34063A) מהטעינה במצת המצית. לא משנה היכן ממוקם המייצב - ישירות על הארדואינו או בנפרד - מודול ה- Bluetooth, התצוגה, חיישן המיקום וממיר הממשק מסדרתיים ומקבילים מופעלים באמצעותו.
המאסטר הלחם תקע לכבל הפלט של יחידת אספקת החשמל, שיכול לעמוד בזרם הנצרך על ידי המעגל כולו, והתקין שקע שמתאים לו במקרה. הנהג וארדואינו הוא התחבר דרך מתג. השקע והמתג חייבים לעמוד גם בזרם זה.
בארדואינו הוא העלה את זה, זה ללא תמיכה ב- Bluetooth, אם אתה זקוק לאחד כזה, תצטרך לבצע את השינויים הדרושים בעצמך. ואם לא רק בלוטות 'אינה נחוצה, אלא לא מתוכננת, ניתן להשמיט את המודול המקביל בכלל. אם המנוע מסתובב בכיוון הלא נכון, עליו להיות הפוך, אם בקר המהירות פועל בכיוון ההפוך, יש להפוך את המסופים של הנגד המשתנה. לאחר שבדק על הלוח כיצד הכל עובד ביחד, TheBigSuleskey הסיר אותו וחיבר את הכל לפי אותה תוכנית, אך באמצעות הלחמה.
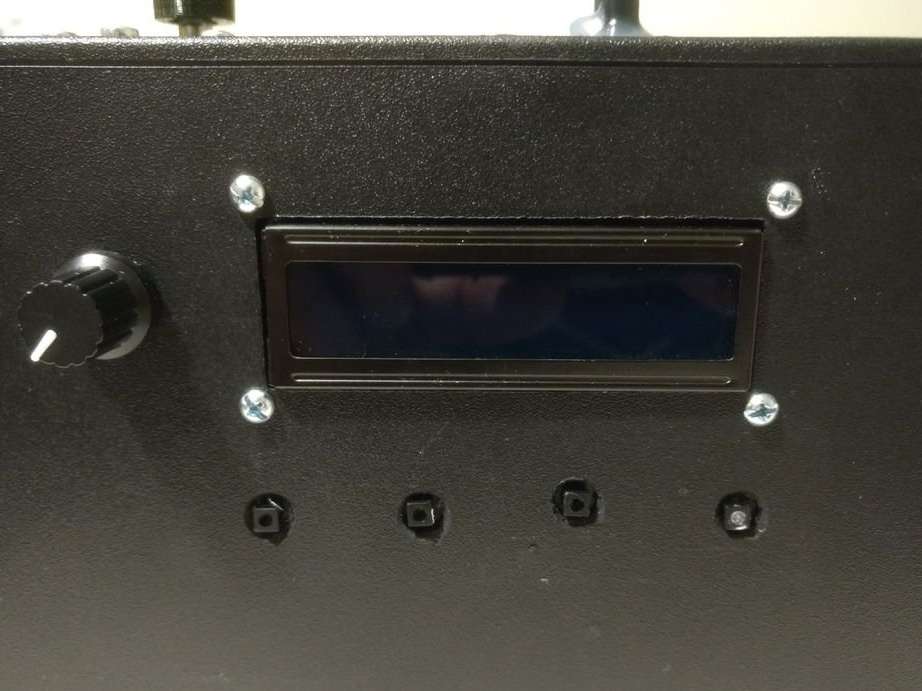
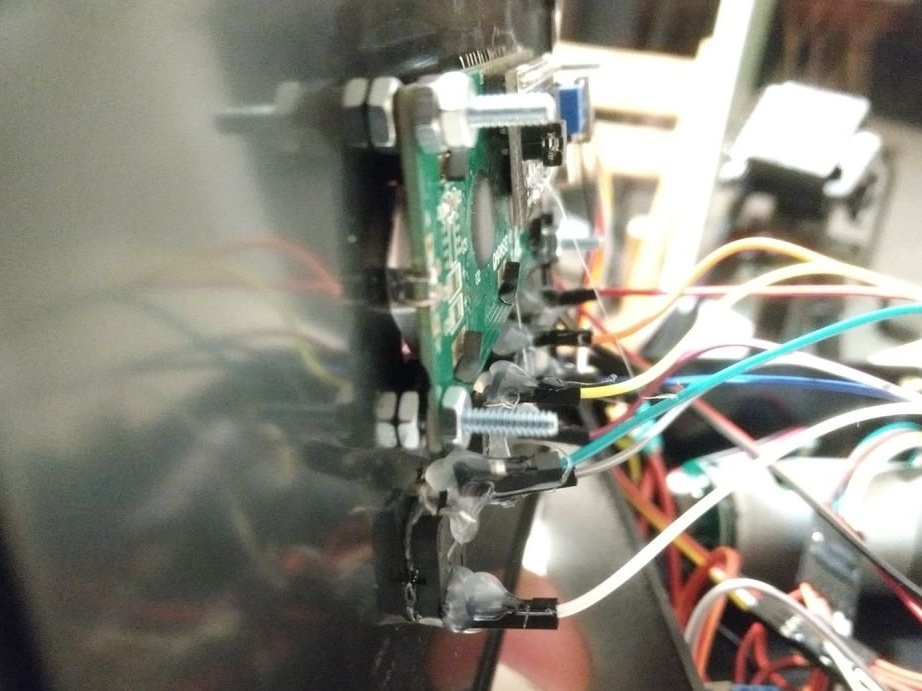
במקרה, המאסטר עשה חורים עבור הכפתורים, המתג, השקע, מוט המנוע, הנגד משתנה וכו '. לשם כך השתמש בכלי יד, מכיוון שחותך הלייזר אינו מתאים לכך, אלא רק עם מכסה המנוע חזק מאוד: PVC פולט יותר עשן מאשר פלסטיק אחר. הדבק את שקע החשמל באפוקסי, הוא דאג שהוא לא ייכנס פנימה. ושקע ה- Arduino USB הוגש מעט. דרושות רגלי גומי, בלעדיהן הגוף ינוע באקראי סביב השולחן. כאן מוצג העיצוב המוגמר מצדדים שונים עם חלקים שהותקנו כבר מודפסים בתלת מימד, ועוד על כך בהמשך.


אלמנטים של המעגל בקושי, אך נכנסו לתיק:
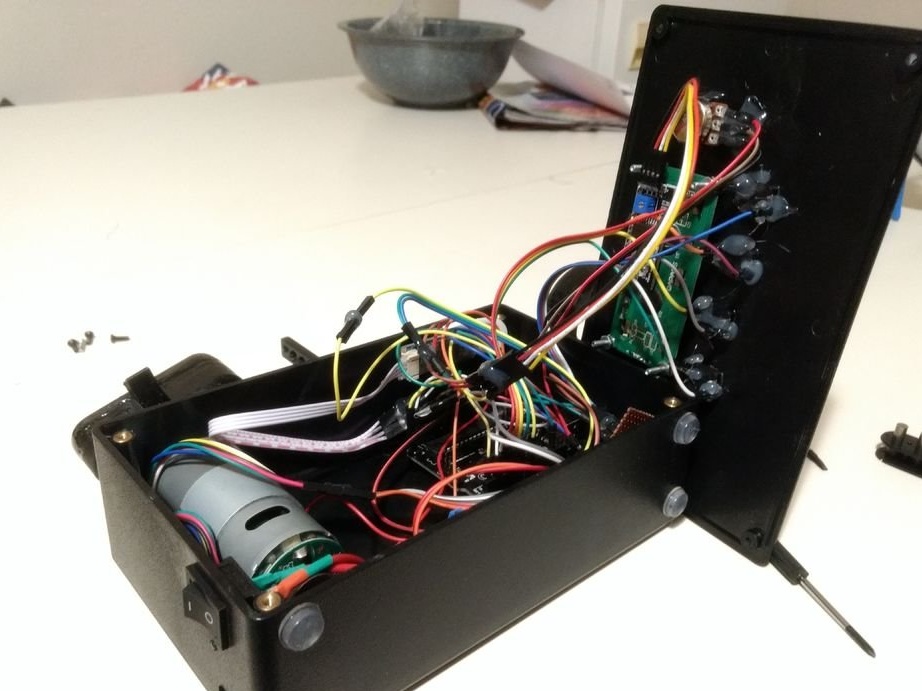

אתה יכול לקחת כל פלסטיק להדפסת תלת מימד. המלית קטנה, אך הקירות עבים יותר כך שיש מרווח לטחינה ידנית לאחר מכן. הסר מגשרים מהחלקים המודפסים.
לא מוצגים קבצים להדפסת הטבעת והמדריך עם חורים. הזרבובית על ציר המנוע מורכבת משלושה חלקים :, ו-. הוא חיבר אותם יחד, המאסטר דאג שהחלק התחתון יהיה דבק בחלקו העליון, אך לא עלה על הדבק הנע. לפני כן, הוא הניח עטים נובעים בחורים המתאימים בחלק התחתון של הקפיץ, ומגנטים במגרעות של המטלטלין. בזרבובית המוגמרת הוא חימם מעט את החור לפיר המנוע בעזרת מייבש שיער כך שהפלסטיק התרכך, הניח את כל המבנה על הפיר ואפשר להתקרר. לאחר מכן המכשיר מוכן לבדיקה ושימוש.