

הקמת הפרויקט החלה בפברואר 2015. ראשית הרובוט הקו של "אנטיי" היה "Domovenok" - מברשת רובוט. בהמשך הופיע "אנטי 1".
פלטפורמת אנטייה היא מקרה המצויד בבקר ארדואינו אונו, חיישנים וכלים לפונקציות שונות. אנטי יכול גם להפוך לשואב אבק, קומביין ביתי, רובוט שומר וכו '.
אבל המאפיין העיקרי של אנטיי הוא הניתוק של "נמלים" שמרגשות את אנטיי.
עקרון הפעולה של המתחם שלנו נלקח מהטבע עצמו. כל נמלה כביכול יכולה לנוע באופן עצמאי, אך גם מסוגלת לבצע עבודה קולקטיבית. יחד עם זאת, הם מסוגלים לא רק להרים עומס הרבה יותר כבד ממשקלם, אלא גם לדעת להעביר יחד עומסים גדולים להפליא עבורם.
כל נמלה שלנו מצוידת במנוע רטט. זוהי צורה של הנעה לא נחקרת למדי. היתרונות שלו ברורים. ראשית, הנעה מסוג זה חסכונית יותר בצריכת אנרגיה. שנית, הוא קומפקטי בשונה מסוגי מנועים אחרים, אך הוא מעניק ביצועים הגונים.
גילינו שכל "נמלה" במשקל 8 גרם. יכול לגרור 89 גרם. זה מצביע על כך שהוא מסוגל לשאת משקל פי 11 משל עצמו.
מאז הקמת אנטי, נשאלה שאלה לגבי מספר מנועי הרטט, כיצד הם ממוקמים על הרציף של הרובוט, וממה יש ליצור רגלי נמלים (מברשת שיניים או רגלי גומי). אפשרויות רבות נוסו.
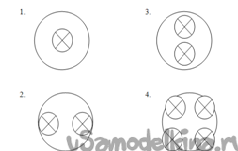
אך הוחלט להקים 2 שורות של 3-4 נמלים על רגלי גומי מכל צד של הרציף, בזמן שהם חייבים להיות בחיבור נוקשה זה לזה.
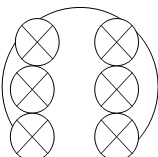
בהתגלמות זו מושגת תנועה קדימה בטוחה, וכאשר מנועים מסוימים נכבים, מתבצעת פנייה לצד.


אנטי שלנו
