
מאמר זה ידבר על איך עשה זאת בעצמך אתה יכול ליצור מכשיר כל כך מעניין כמו לויטרון. לאמיתו של דבר ,וויטריטון הוא ראש מסתובב או אובייקט אחר שמרקב בחלל עקב פעולתו של שדה מגנטי. לויטרונים הם מגוונים. הדגם הקלאסי משתמש במערכת של מגנטים קבועים וטופ מסתובב. הוא מרחף מעל המגנטים במהלך סיבוב בגלל היווצרות כרית מגנטית שמתחתיה.
הכותב החליט לשפר מעט את המערכת על ידי בניית לויטרון על בסיס ארדואינו באמצעות אלקטרומגנטים. בשיטות אלה החלק העליון אינו צריך להסתובב כדי להמריא באוויר.
מכשיר כזה יכול לשמש למגוון אחר תוצרת בית. לדוגמה, זה יכול להיות נושא מצוין, מכיוון שלמעשה אין בו כוחות חיכוך. כמו כן, על מוצר כזה תוצרת בית, אתה יכול לערוך ניסויים שונים, טוב, או לשחק חברים.
חומרים וכלים לייצור:
- מיקרו-בקר Arduino UNO;
- חיישן הול ליניארי (המודל UGN3503UA);
- שנאים ישנים (לסלילים מפותלים);
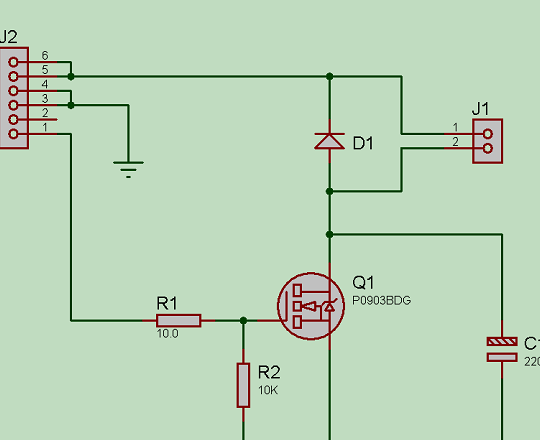
- טרנזיסטור אפקט שדה, נגדים, קבלים ואלמנטים אחרים (דירוגים ומותגים מוצגים בתרשים);
- חוטים;
- ברזל הלחמה עם הלחמה;
- ספק כוח 12V;
- פקק;
- מגנט ניאודימיום קטן;
- דבק חם;
- הבסיס לסלילים מפותלים וחומרים ליצירת גוף ביתי.
תהליך הייצור של לויברון:
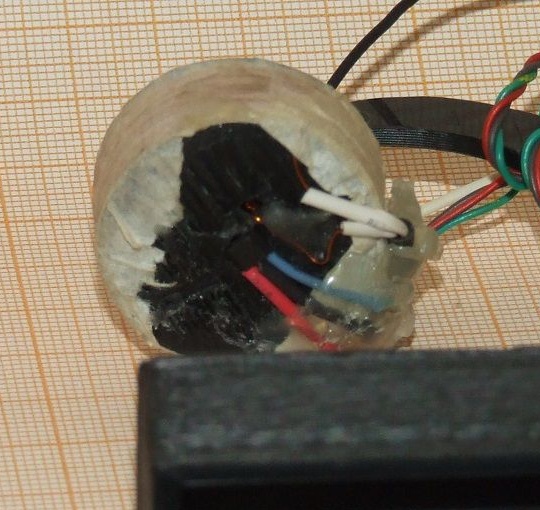
צעד ראשון. הכינו סליל
הסליל יהיה אלקטרומגנט, הוא יצור שדה מגנטי שימשוך את החלק העליון. כחלק העליון יהיה פקק שעליו מחובר מגנט ניאודימיום. במקום פקק אפשר להשתמש בחומרים אחרים, אך לא כבדים מדי.
באשר למספר הפניות בסליל, כאן המחבר לא הזכיר דמות כזו, הסליל הולך לעין. כתוצאה מכך, התנגדותה הייתה כ 12 אוהם, גובה 10 מ"מ, קוטר 30 מ"מ ועובי החוט המשמש צריך להיות 0.3 מ"מ. אין סליל בסליל, אם אתה צריך להכין חלק עליון כבד יותר, אז הסליל יכול להיות מצויד בליבה.
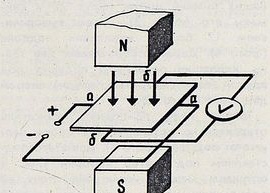
שלב שני תפקיד חיישן ההיכל
בכדי שהחלק העליון ייעוף באוויר, במקום להיצמד חזק לסולנואיד, המערכת זקוקה לחיישן שיכול למדוד את המרחק לפסגה. כאלמנט כזה משתמשים בחיישן הול. חיישן זה מסוגל לאתר את השדה המגנטי לא רק של מגנט קבוע, אלא גם יכול לקבוע את המרחק לחפצי מתכת כלשהם, מכיוון שחיישנים כאלה עצמם יוצרים שדה מגנטי חשמלי.
הודות לחיישן זה החלק העליון תמיד שומר על המרחק הנכון מהסולנואיד.

כאשר החלק העליון מתחיל להתרחק מהסליל, המערכת מעלה את המתח. לעומת זאת, כאשר החלק העליון מתקרב לסולנואיד, המערכת מורידה את המתח בסליל והשדה המגנטי נחלש.
יש שלוש יציאות בחיישן, זהו כוח 5 וולט, כמו גם פלט אנלוגי. האחרון קשור ל- ADC של ארדואינו.
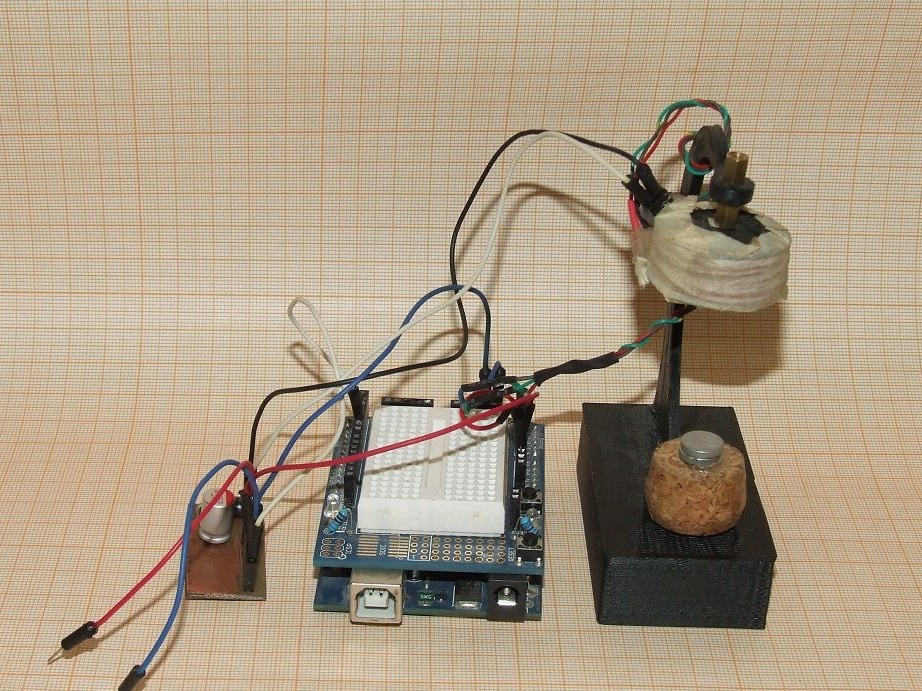
שלב שלישי אנו מרכיבים את המעגל ומתקינים את כל האלמנטים
כגוף לעבודה תוצרת בית, אתה יכול להשתמש בפיסת עץ, שאליה אתה צריך להכין סוגר פשוט לחיבור הסליל. אלקטרוני התוכנית די פשוטה, הכל ניתן להבין מהתמונה. אלקטרוניקה עובדת ממקור 12 וולט, ומכיוון שהחיישן זקוק ל -5 וולט, הוא מחובר דרך מייצב מיוחד, שכבר מובנה בבקר ארדואינו. המכשיר המרבי צורך אמפר אחד. כאשר החלק העליון צועק, הצריכה הנוכחית היא בטווח של 0.3-0.4 A.
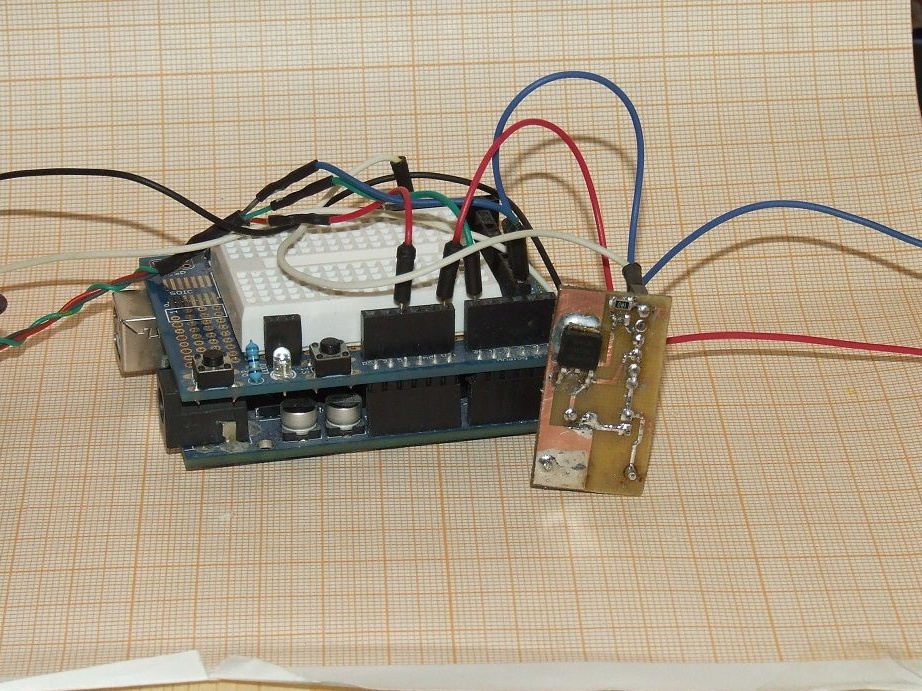
טרנזיסטור אפקט שדה משמש לשליטה בסולנואיד. הסולנואיד עצמו מחובר לפלטים של J1, ויש לחבר את המגע הראשון של מחבר J2 ל- PWM Arduino. התרשים לא מראה כיצד לחבר את חיישן ה- Hall ל- ADC, אך לא אמורות להיות בו בעיות.
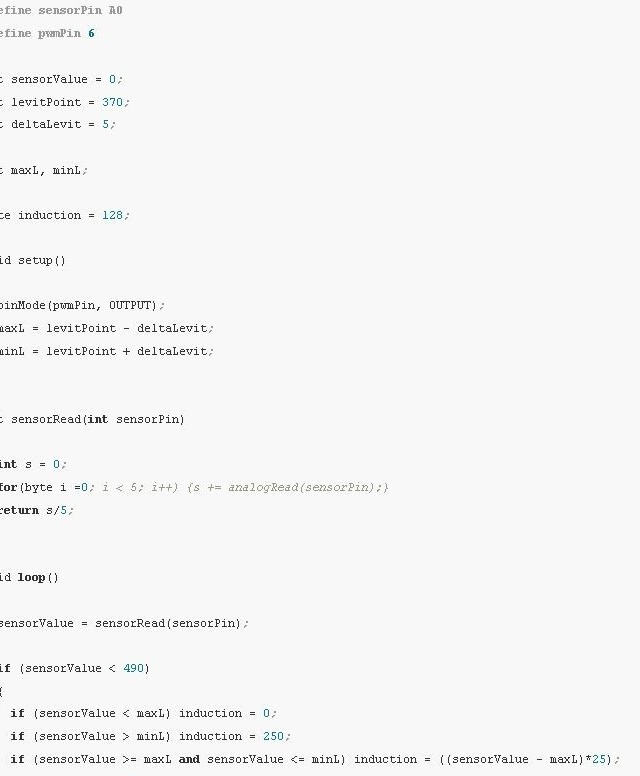
שלב רביעי קושחת בקר
כדי לתכנת את הבקר לפעולות הנדרשות, נדרשת קושחה. התוכנית עובדת בפשטות רבה. כאשר הערכים מתחילים ליפול מחוץ לטווח המותר, המערכת מגדילה את הזרם למקסימום, או מכבה לחלוטין. בגרסאות מאוחרות יותר של הקושחה התאפשר התאמה חלקה של המתח על הסליל, כך שהתנודות החדות של החלק העליון נעצרו.
זה הכל, המוצר הביתי מוכן. בהתחלה הראשונה המכשיר עבד, אך התגלו כמה פגמים. כך, למשל, כאשר עובדים יותר מדקה אחת, הסליל והטרנזיסטור התחילו להתחמם מאוד. בהקשר זה, בעתיד, אתה צריך להתקין רדיאטור על הטרנזיסטור או לשים אחד חזק יותר. כמו כן, יהיה צורך לבצע את הסליל מחדש, לאחר שיש לו עיצוב אמין יותר מסתם סלילי חוט עם דבק חם.
על מנת להגן על מקור הכוח, יש לספק קבלים גדולים למעגלי הכניסה. ספק הכוח הראשון של המחבר הראשון של הכותב נשרף לאחר 10 שניות בגלל נחשולי מתח חזקים.
בעתיד מתוכנן להעביר את המערכת כולה לאספקת חשמל 5V.