
בניתי לאחרונה עשרות רובוטים, בעיקר בהשראת נפלאות הרובוטיקה של BEAM. אם אינך מכיר טכנולוגיה זו, BEAM היא שיטה מיוחדת לבניית רובוטים עם דגש B - ביולוגיה, E - אלקטרוניקה (אלקטרוניקה), א- אסתטיקה (אסתטיקה) ו- M - מכניקה (מכניקה). זהו ראשי התיבות BEAM. מה שמפריד בין טכנולוגיה זו לגישות אחרות הוא השימוש באנרגיית קרינה בלבד לתזונה (בעיקר אנרגיה סולארית), סילוק חומרים שונים (שימוש חוזר) ומינימליזם. למרות שאימצתי את העקרונות האלה, שלי רובוטים לא ממש היו ברוח BEAM (הם הונעו על ידי סוללה).
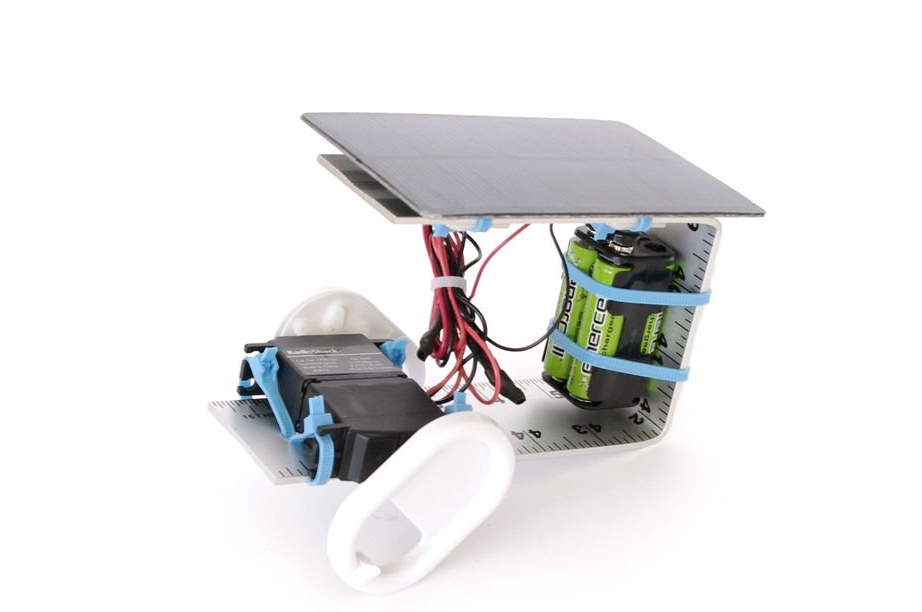
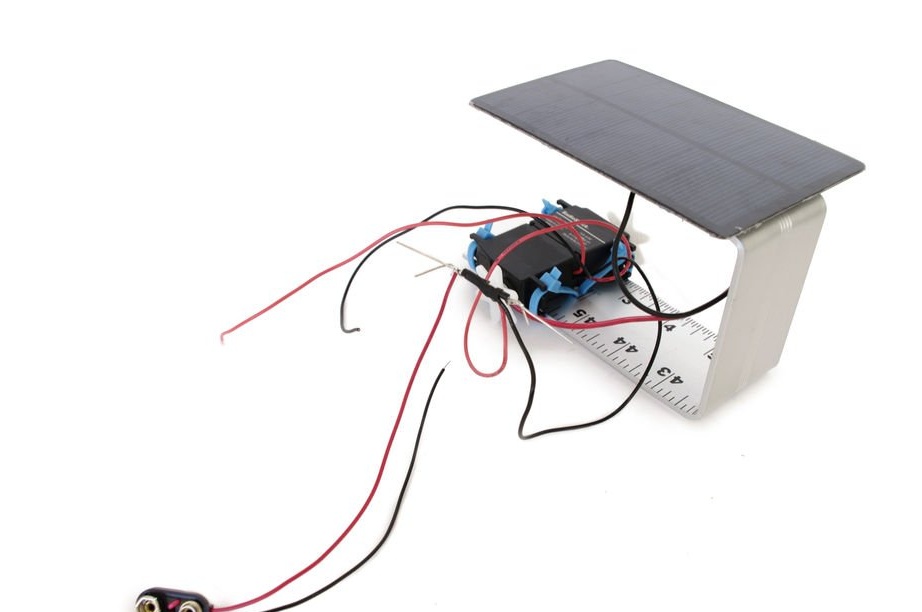
מכיוון שהרובוטיקה של BEAM העניקה לי השראה ברצינות, רציתי ליצור רובוט המונע באמצעות שמש. אבל במקום פשוט ליצור רובוט של BEAM, החלטתי לשלב לוח סולרי ברובוט בסגנון הרגיל שלי. במקום לשמש במלואה על ידי השמש, החלטתי לבנות סוללות נטענות. כלומר, ניתן להפעיל את הרובוט שלי מסוללה או מלוח סולארי, תלוי באיזה מקור כוח הוא כעת חזק יותר. לוח השמש מטען גם את הסוללות כאשר אור השמש פוגע בו. זה מאפשר לרובוט לנוע גם באור וגם בצל.
אני חושב שגישה זו משלבת בהצלחה שני סגנונות, וזה ניסוי מעניין בבניית רובוטים.
שלב 1: חומרים
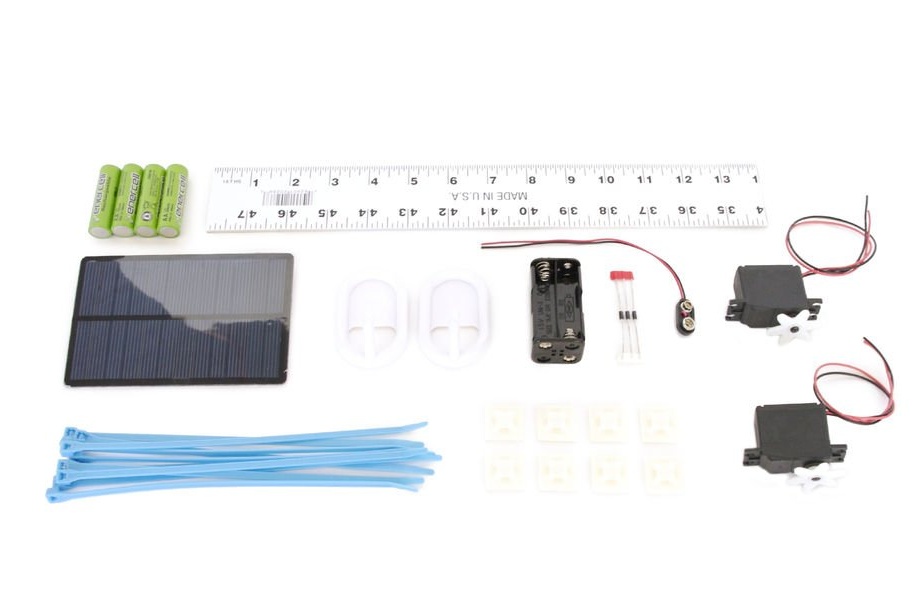
תצטרך:
(x1) פאנל סולארי
(x2) מנועי סרוו סטנדרטיים
(x3) דיודות שוטקי 1N5817 - שווה ערך ל- NTE578
(x1) 9 וולט סוללה
(x8) סוללות AA נטענות
(x1) 8 סוללות AA בעלות סוללה AA
(x12) בסיס למהדקים
(x1) שליט (30 - 50 ס"מ)
(x2) ווים דבקים על קיר
(x1) מלחציים מפלסטיק
(x1) צינורות לכווץ חום
שלב 2: שנה את סרוו

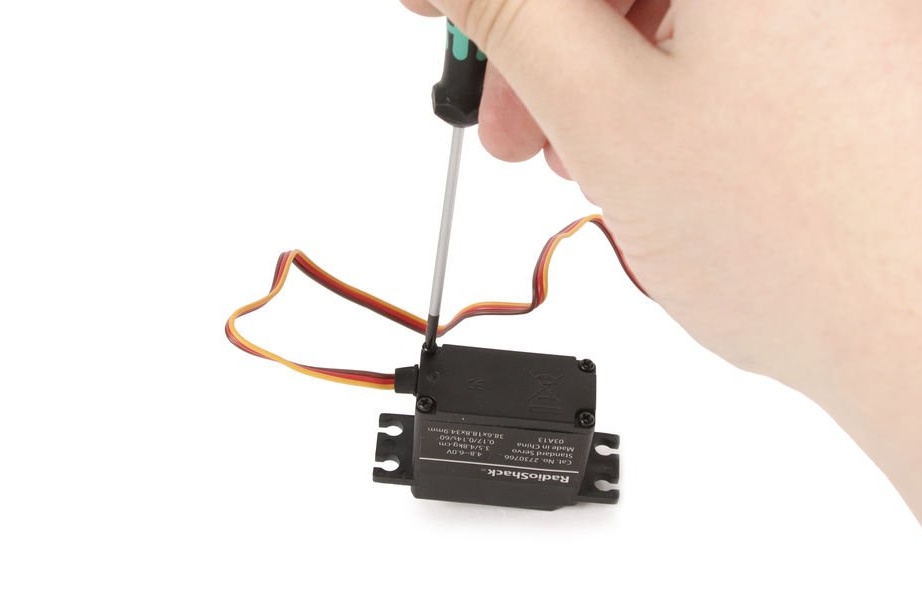
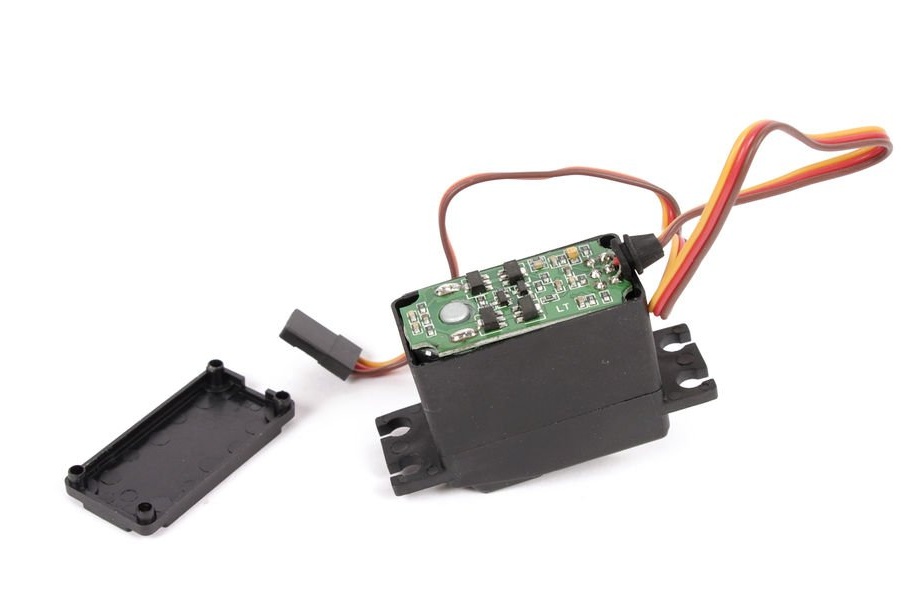
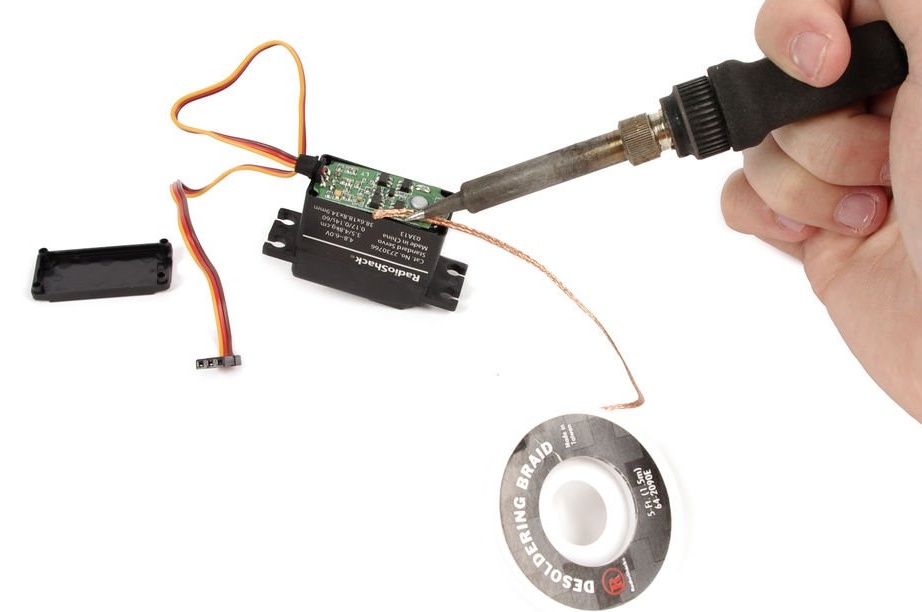
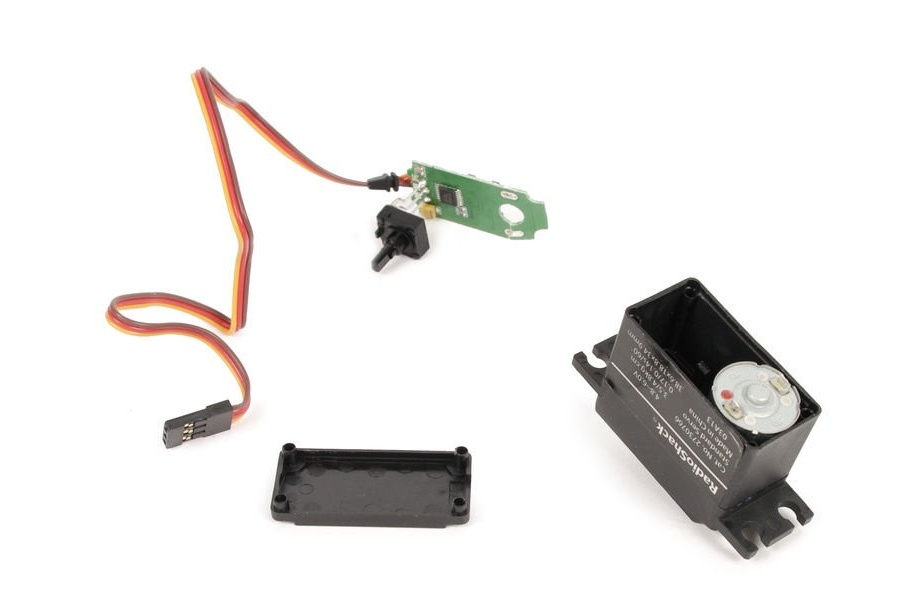




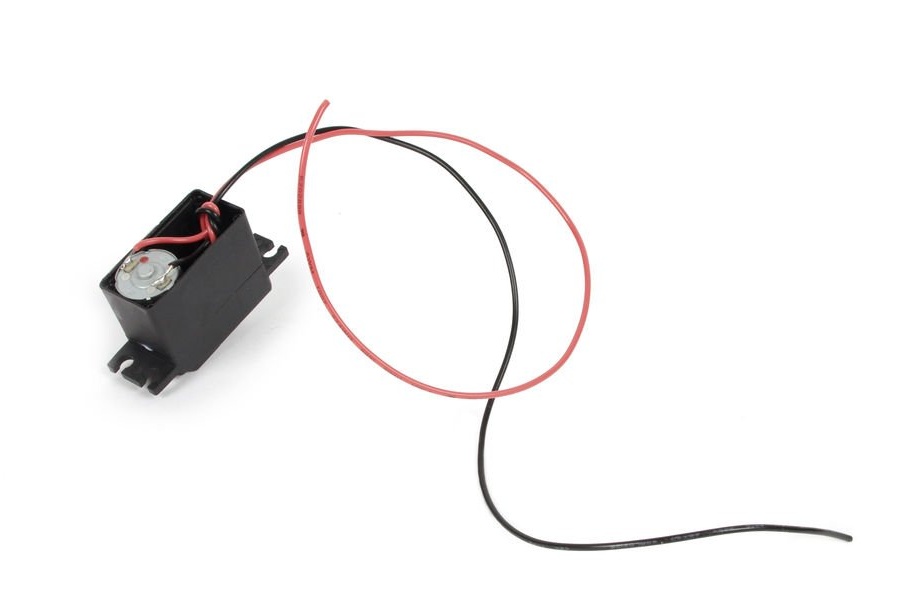
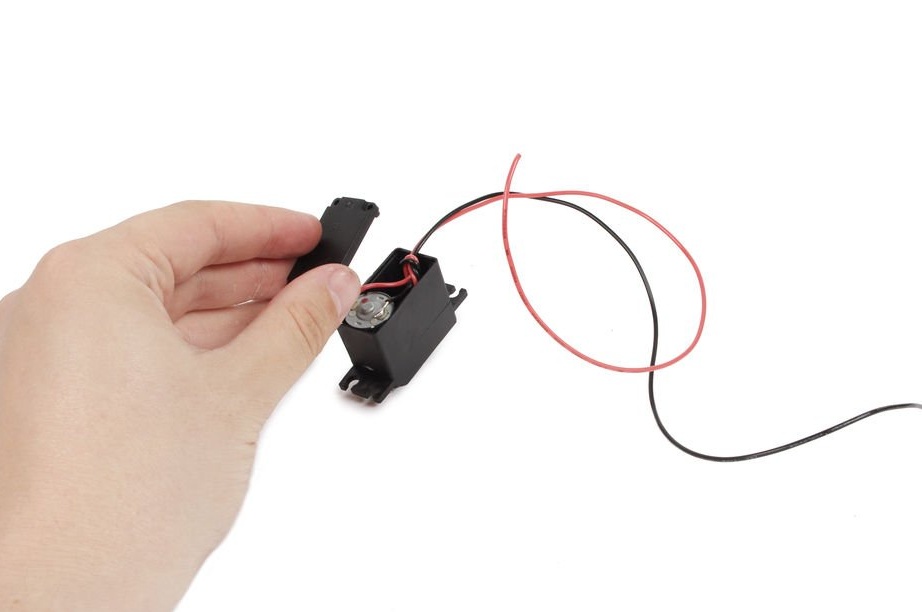

פתח את מעטפת הסרוו על ידי הברגה של 4 ברגים בלוח התחתון. פתח את הלוח בפנים וחבר את החיווט האדום והשחור לכל מסוף של הכונן.
פתח את כונן ההילוכים ומצא את ההילוכים עם מכסה פלסטיק קטן המונע סיבוב רציף. חתוך את הכובע מההילוך.
שלב 3: תרגיל
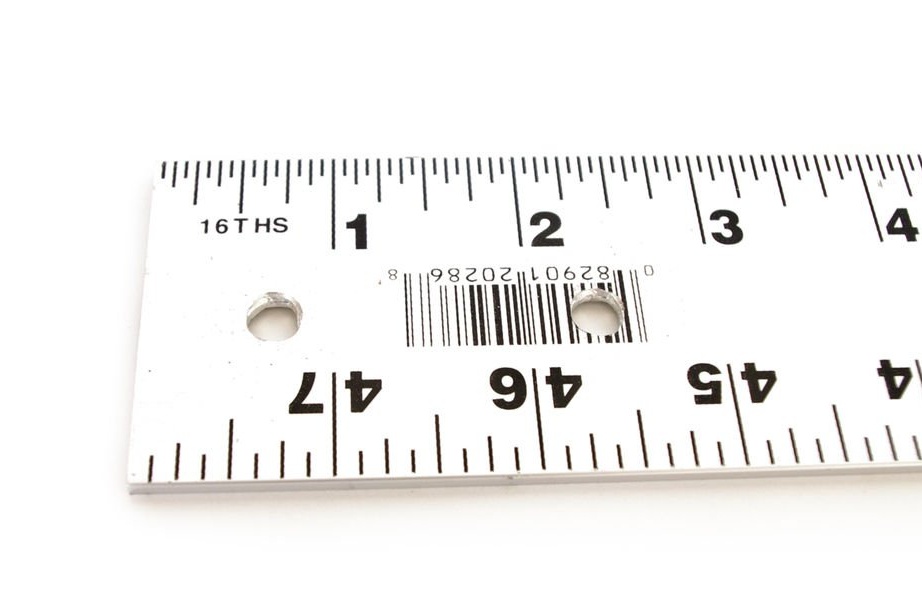


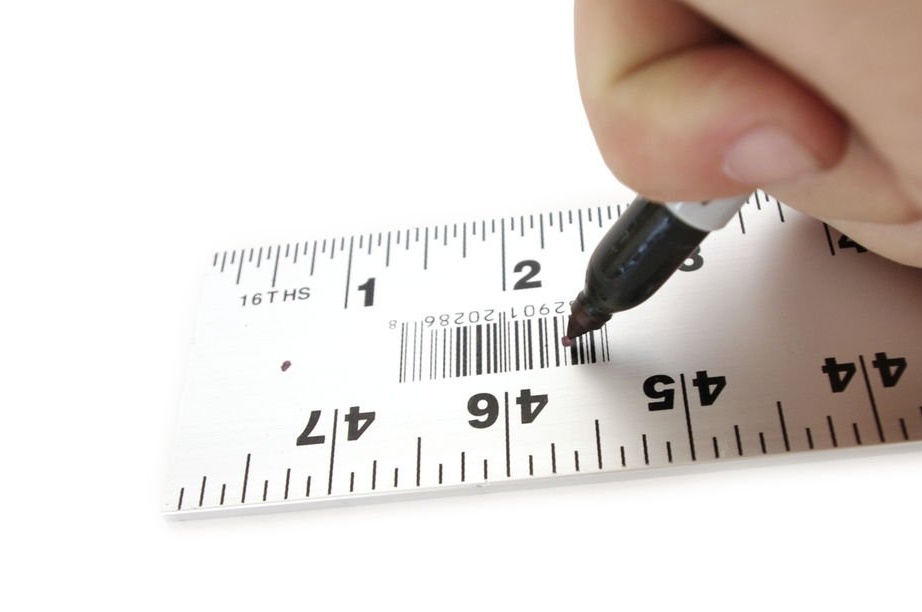
מקדחים חור של 6.3 אינץ 'באמצע הסרגל, כ- 15 מ"מ מהקצה הקצר. קדחו חור שני בערך 60 מ"מ מאותו הקצה.
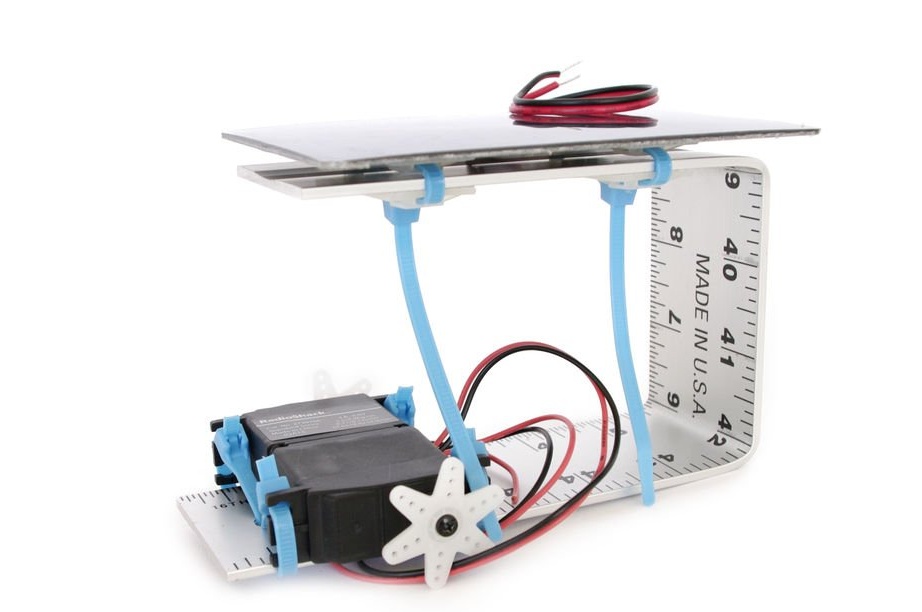
שלב 4: כופף

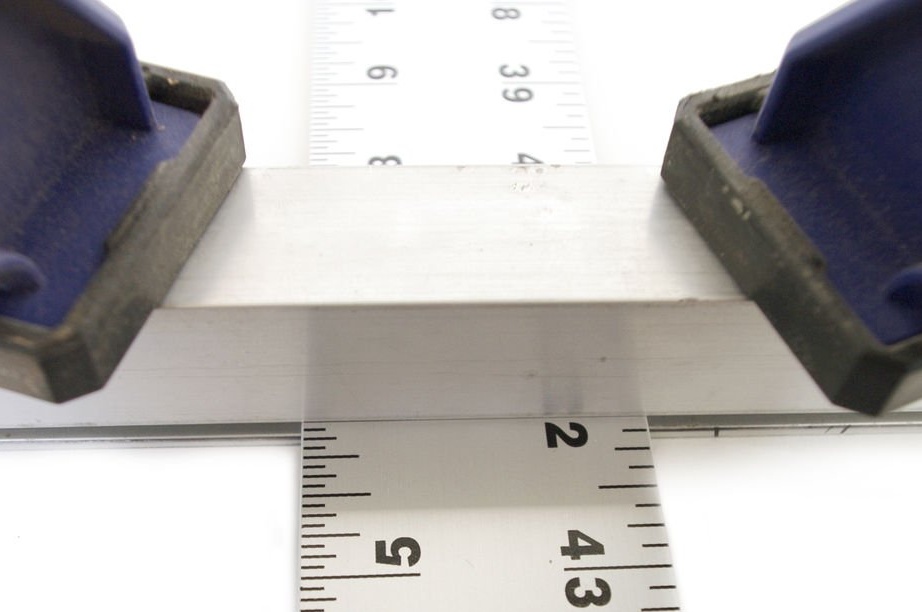
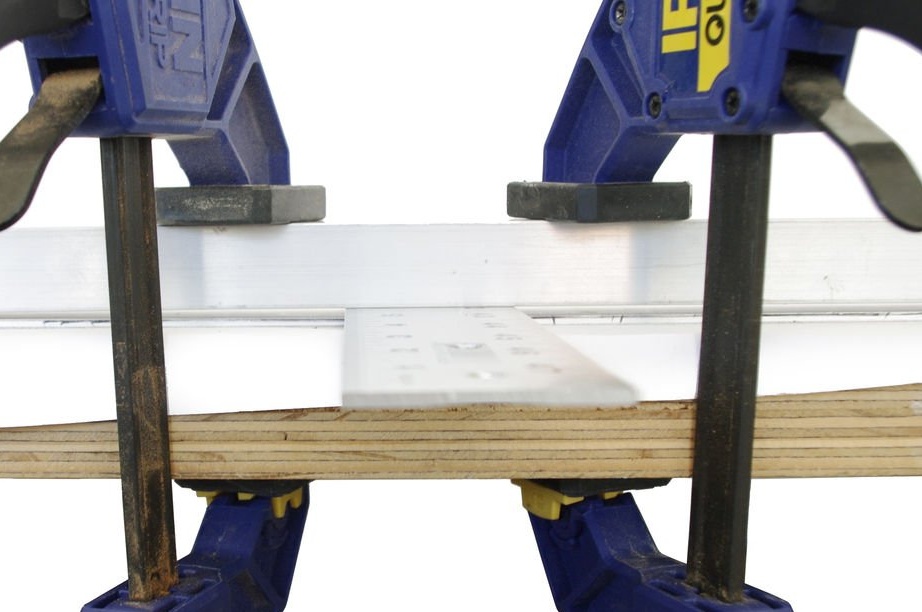

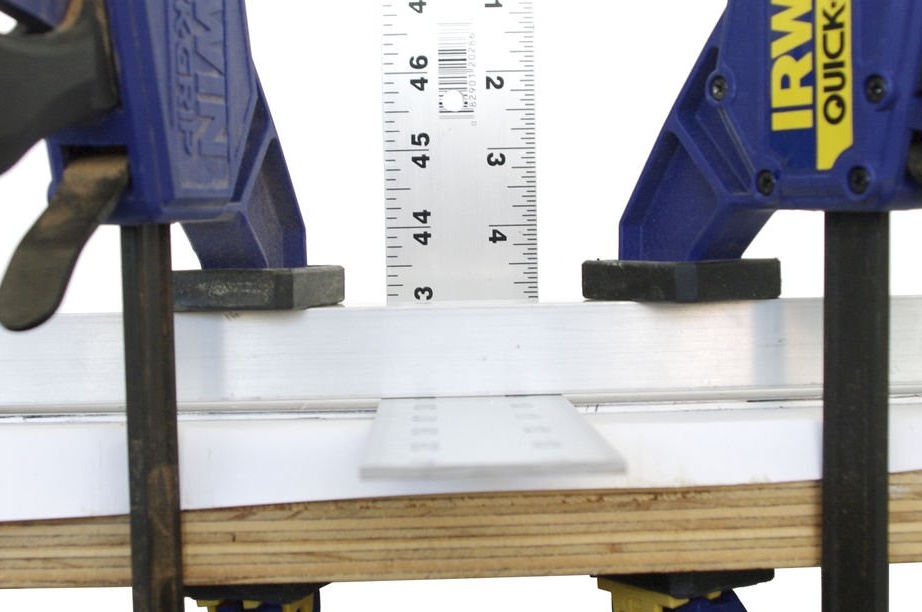

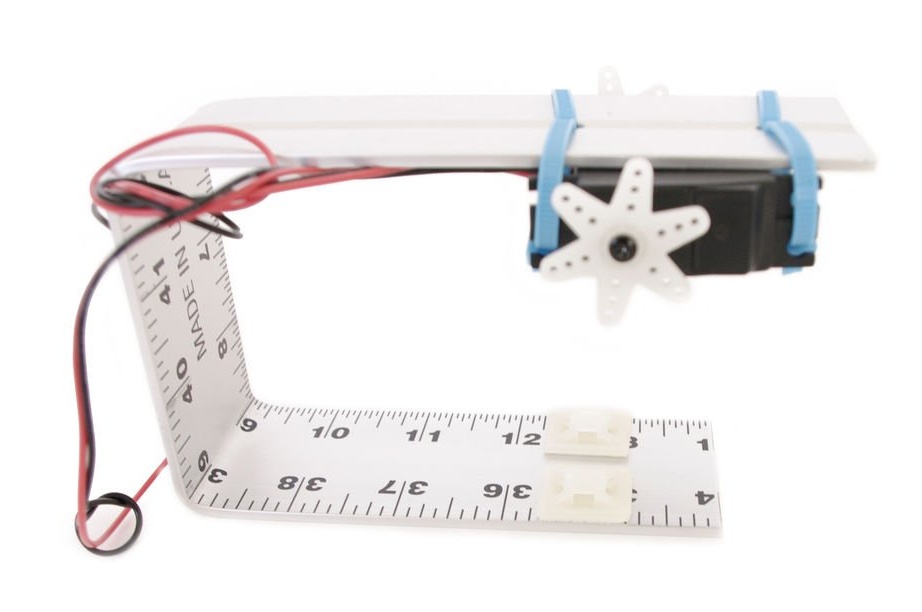
בעזרת מסגרה או שתי לוחות מתכת מהודקים על קצה השולחן, כופפו את הסרגל בזווית של 90 מעלות במרחק של 15 ס"מ מהקצה בו נקדחו החורים.
בצע את אותה עיקול בזווית של 90 מעלות במרחק של 15 ס"מ מהקצה השני. תקבל דמות בצורת האות פ.
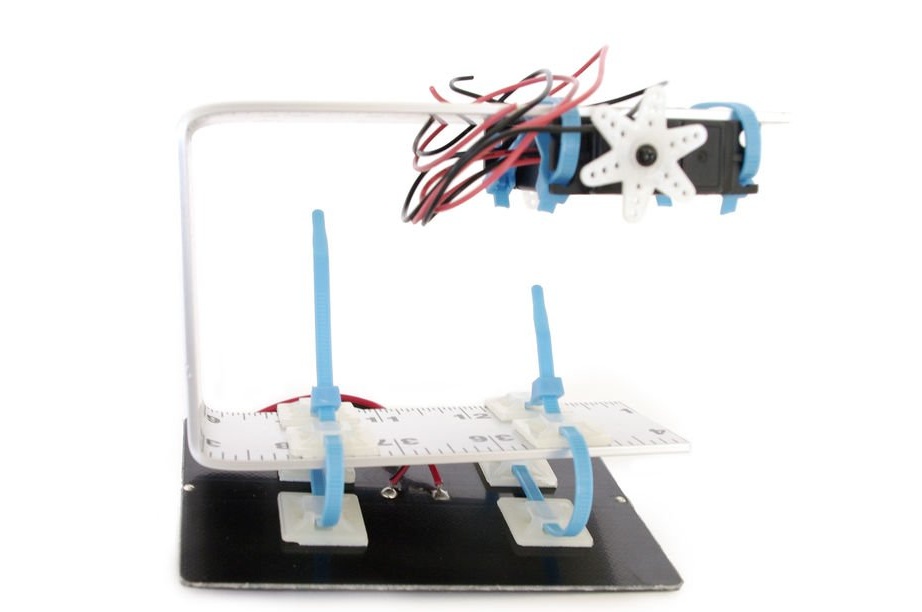
שלב 5: חיבור
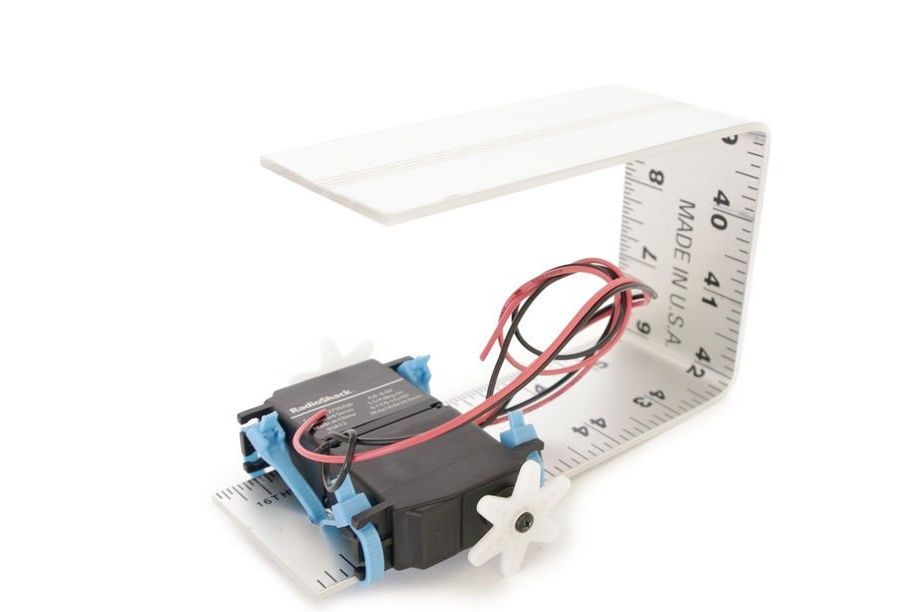

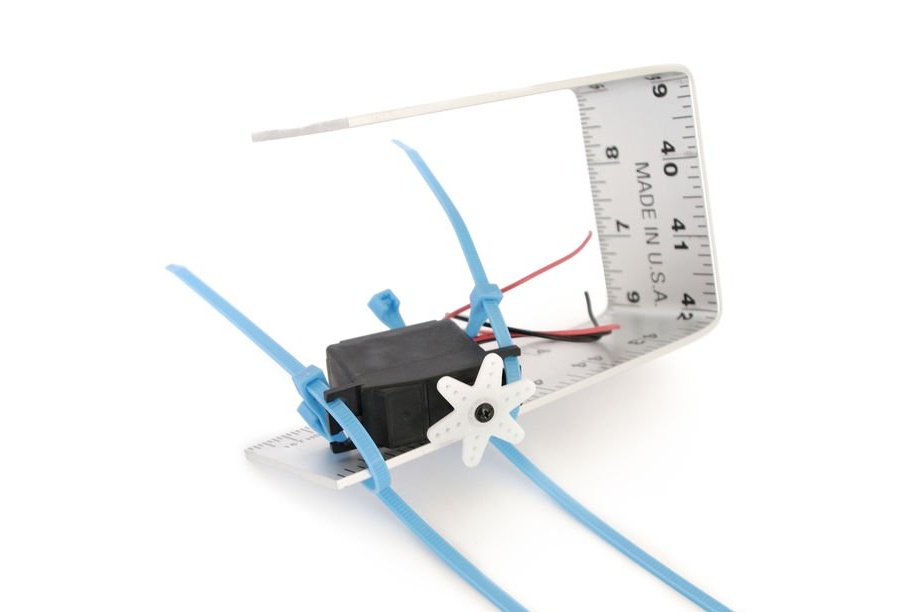
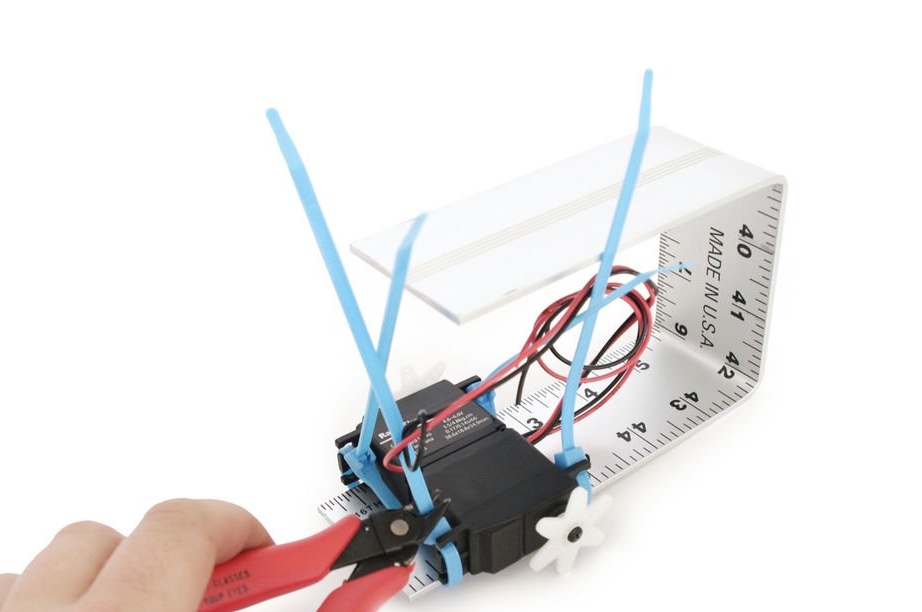
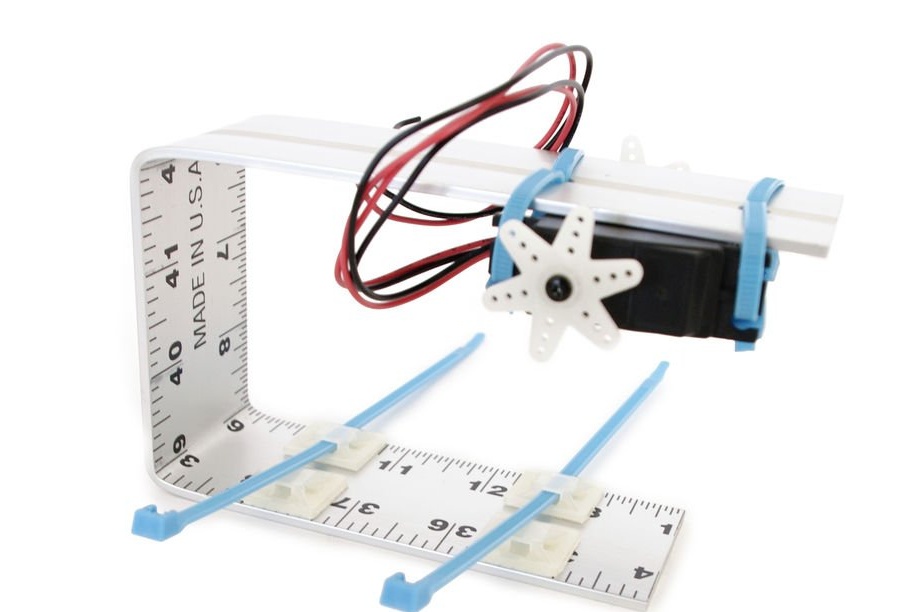
יש צורך לתקן את סרוו הקו באמצעות מהדקי פלסטיק, דרך חורים קדוחים. סרווומוטורים חייבים לשבת עם גבם זה לזה.
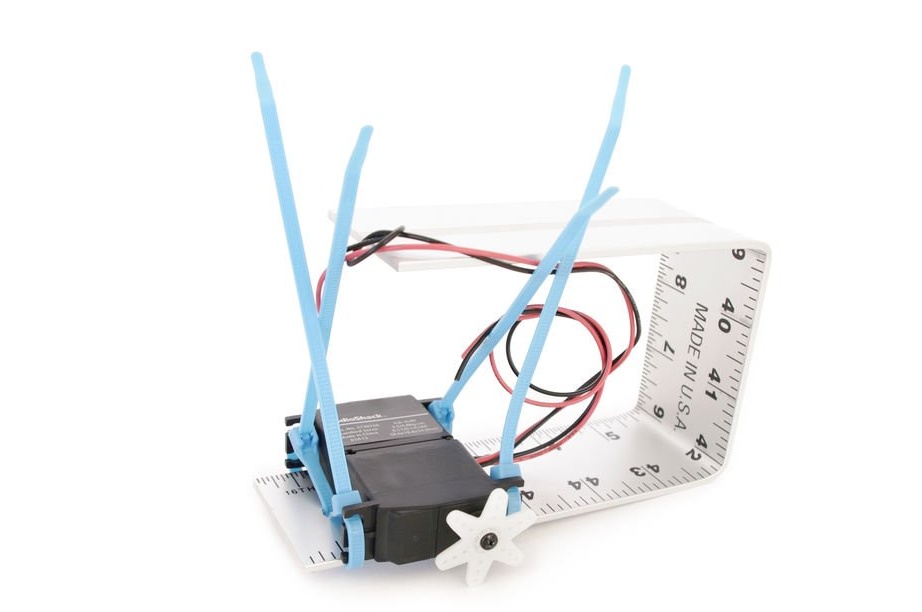
שלב 6: בסיס למהדקים
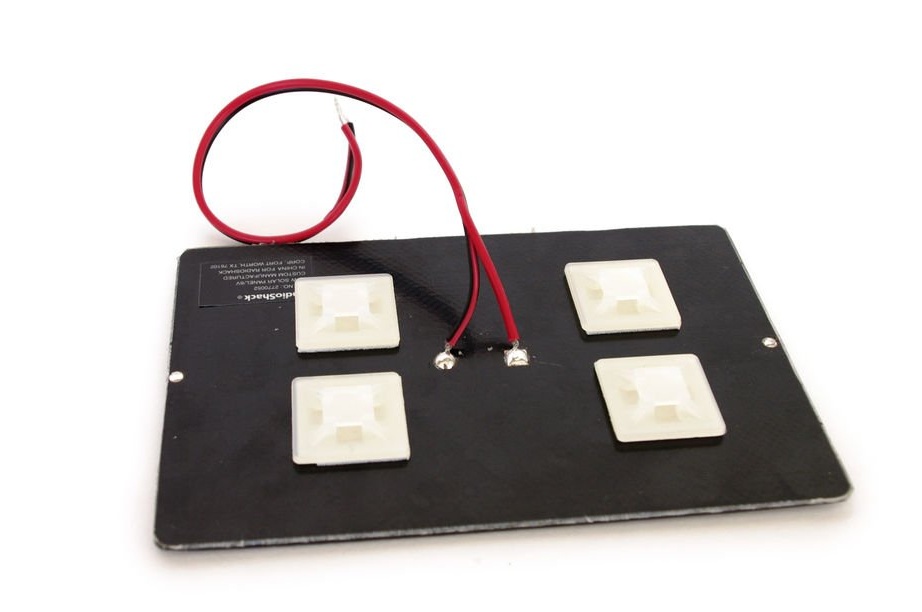

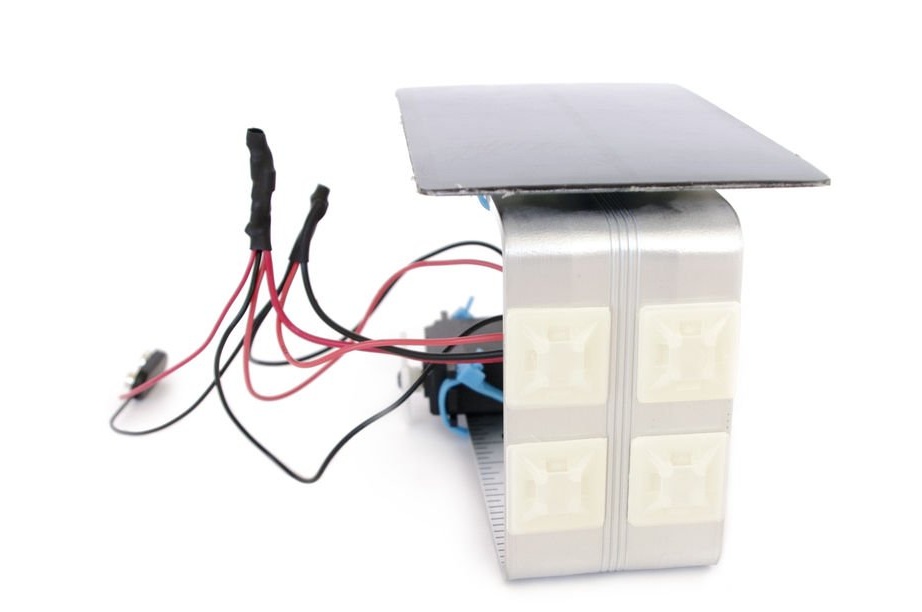
הניחו שני זוגות של בסיסי מהדק אחד ליד השני בגב לוח השמש. חשוב שהערוצים של כל זוג יהיו באותו קו.
שלב 7: סיבות נוספות
חבר שני בסיסים נוספים אל פנים U-bar, לצד שמול סרוו.
שלב 8: חיבור
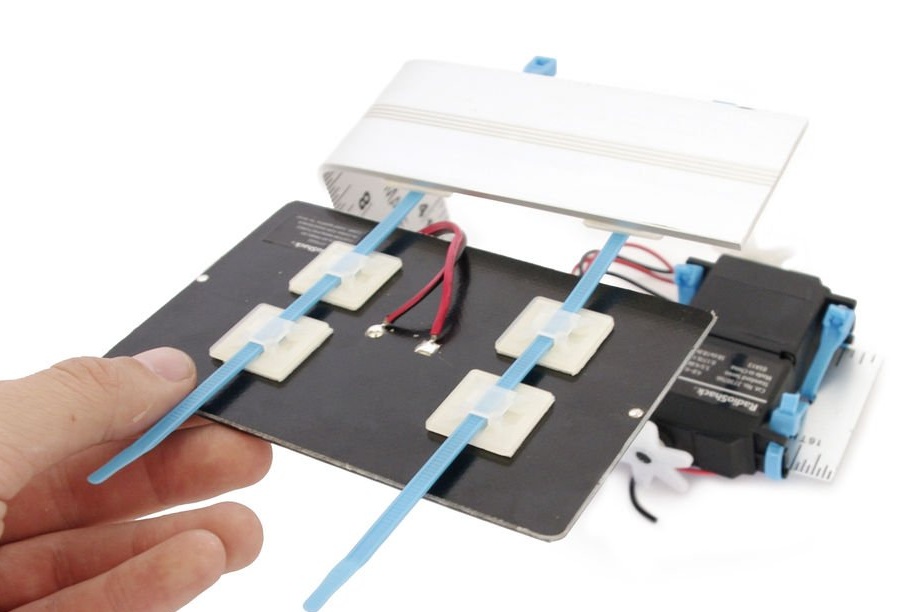
חבר את לוח השמש עם מלחציים דרך בסיסים קבועים.
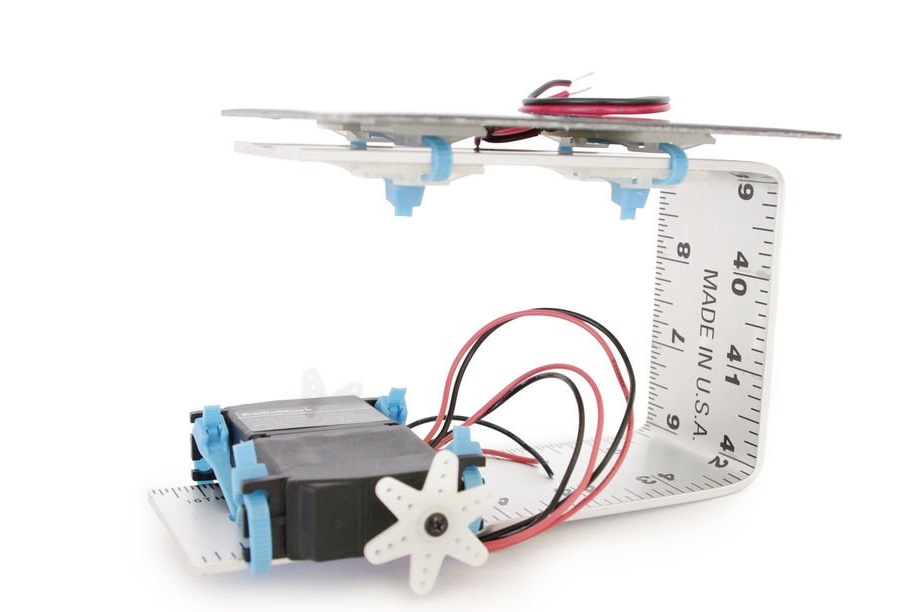
שלב 9: הכנס את הסוללות


הכנס את הסוללות לארוז הסוללות.
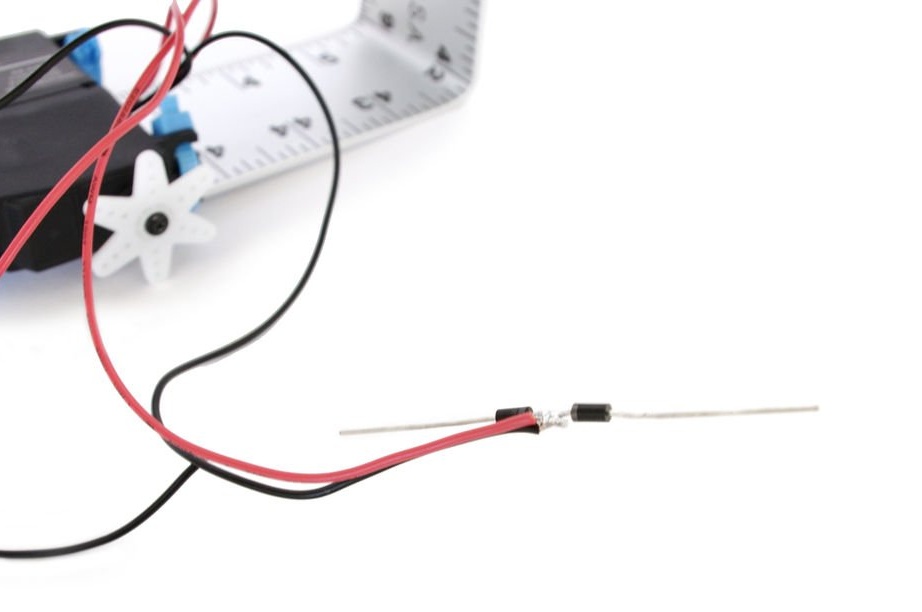
שלב 10: דיודות

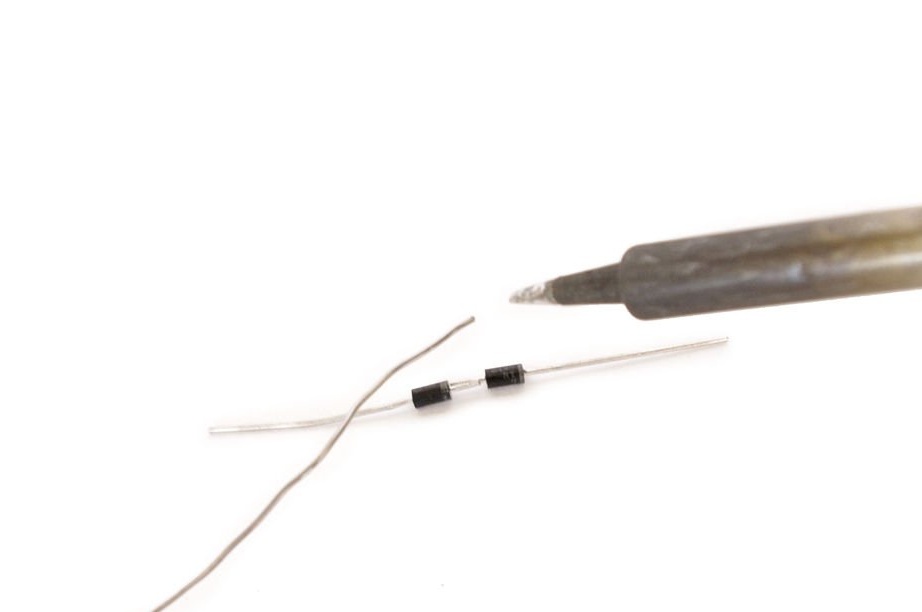
הלחמה של שתי הדיודות יחד עם הקתודות (הצד של הדיודות עם המסילה).
שלב 11: הרכבת שרשרת
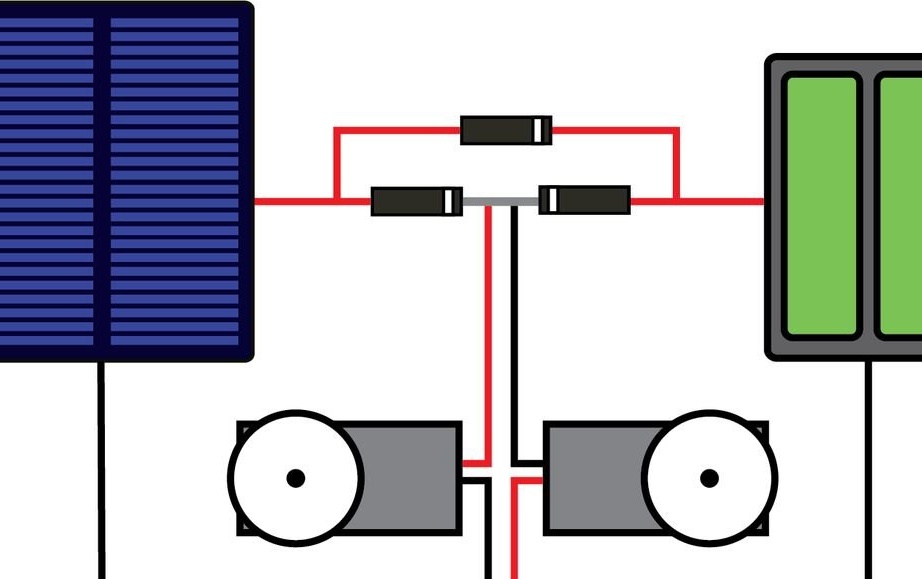
המעגל לרובוט זה מבוסס על מעגל הטעינה הסולארי הפשוט של דייויד קוק. המעגל מכיל שתי דיודות שוטקי המחוברות באמצעות קתודה לקתודה, דיודה אחת המחוברת לפאנל סולארי ואחת הסוללות. תצורה זו מאפשרת לך להיות מופעל על ידי סוללות ופאנל סולארי, תלוי בתנאים.
מכיוון שהסוללות נטענות, דיודה של שוטקי השלישית מחוברת ישירות מלוח השמש לתא הסוללות כדי לטעון את הסוללות מהשמש.
כדי לחבר את הכל, חבר את החוט האדום מאחת השרתים ואת החוט השחור מהשני לנקודה המרכזית של חיבור הקתודה.
בשלב הבא, חבר את החוט האדום מסוף הסוללה לאנודה של אחת הדיודות של שוטקי. חבר את החוט האדום מלוח השמש לאנודה בדיודה אחרת.
עכשיו הלחמו את האנודה של הדיודה השלישית לחוט האדום שמחובר ללוח הסולארי, ואת הקתודה לחוט האדום מסוף הסוללה.
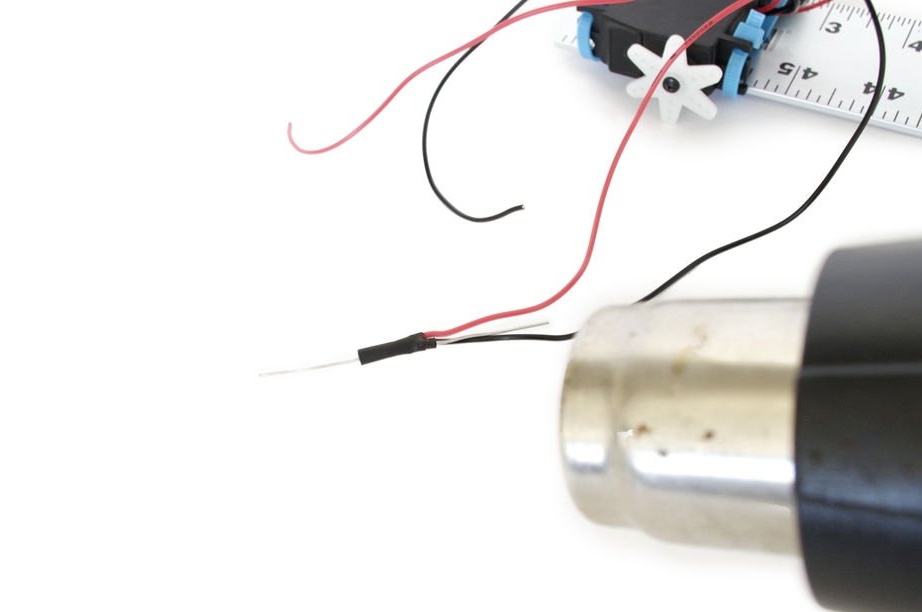
עטפו את כל החוטים עם צינורות לכווץ חום כדי להגן על המעגל מפני מעגלים קצרים.
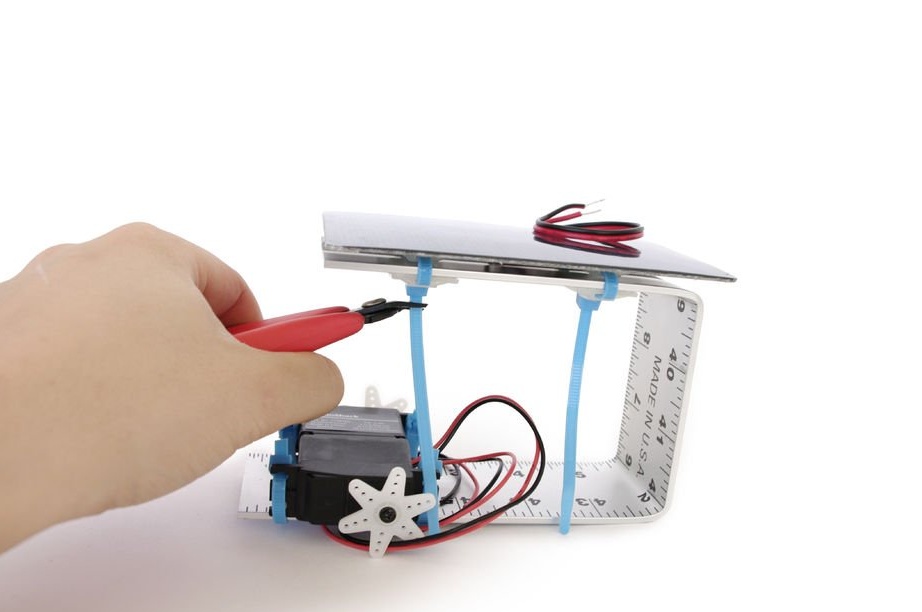
שלב 12: כמה חוטים נוספים
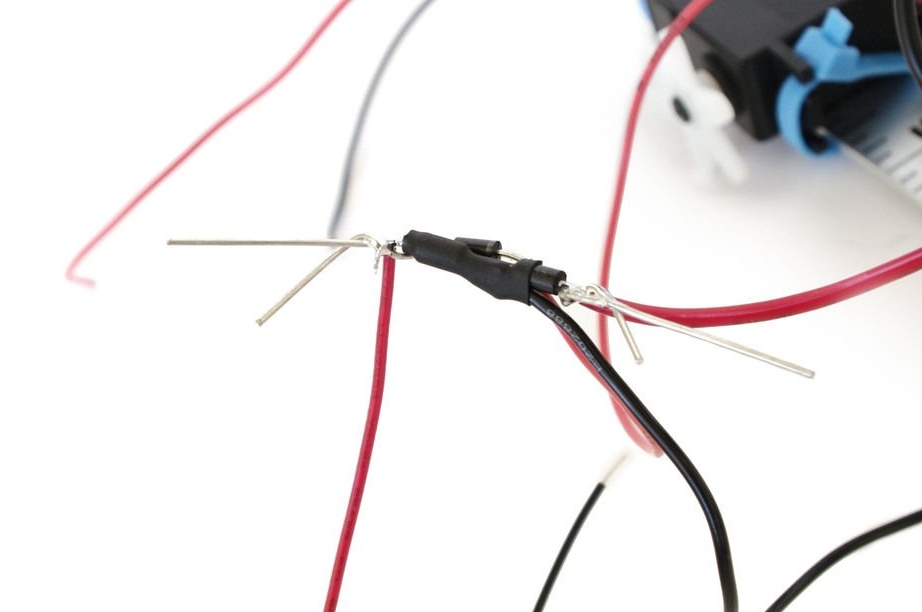
הלחמו יחד את כל החוטים השחורים ואת שאר החוטים האדומים החופשיים מהסרווס.
קבל שני מפרקים מולחמים; אחד עבור כוח, ואחד עבור הארקה. עטפו את שני המפרקים הללו עם צינורות לכווץ חום או סרט חשמלי.
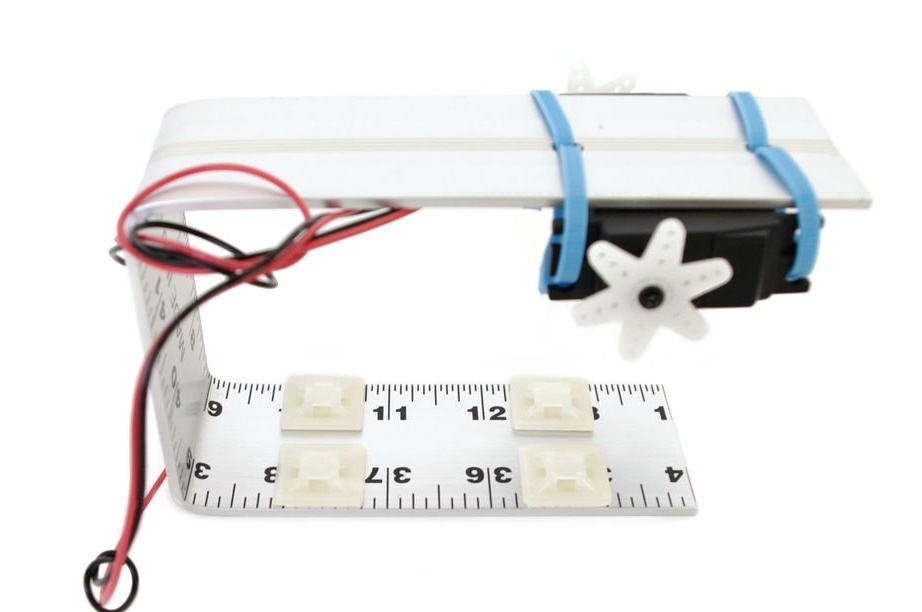
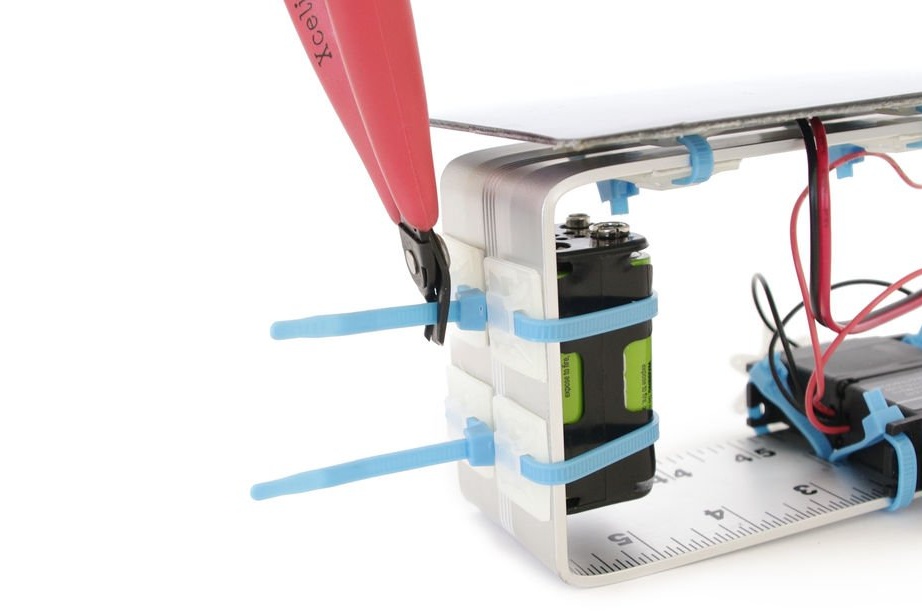
שלב 13: ועוד כמה סיבות להדק
מהדק שני זוגות בסיסים בחלק התחתון של הסרגל המעוגל בצורת U.
שלב 14: אבטחת הסוללות
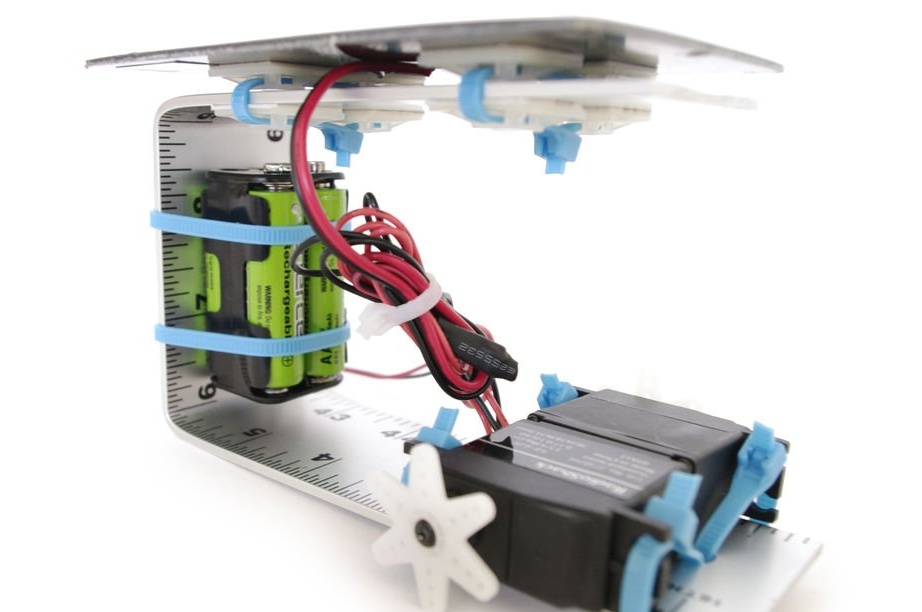
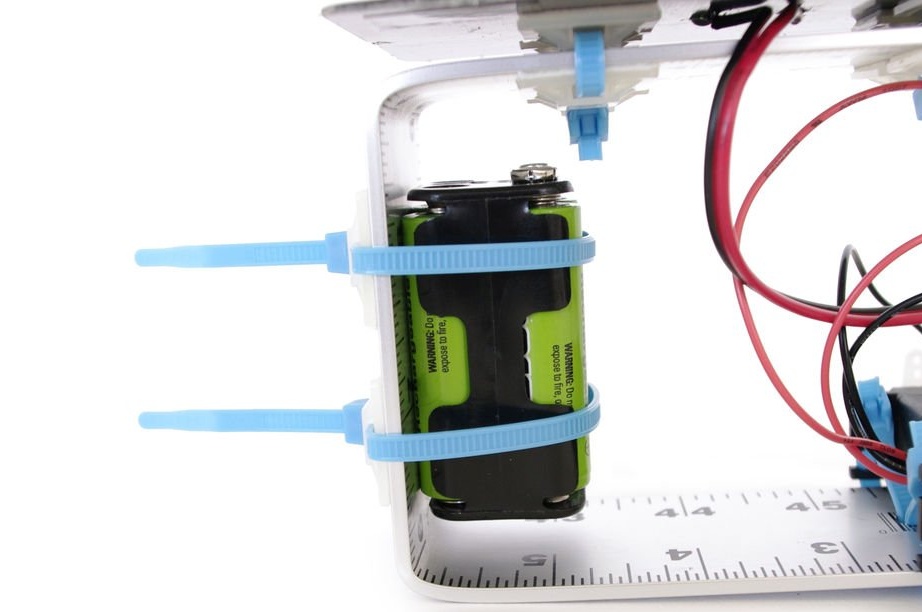
אבטח את הסוללות עם מהדקים בתוך הסרגל בצורת U כך שהם יושבים בצורה יציבה וחסרת תנועה במקום.
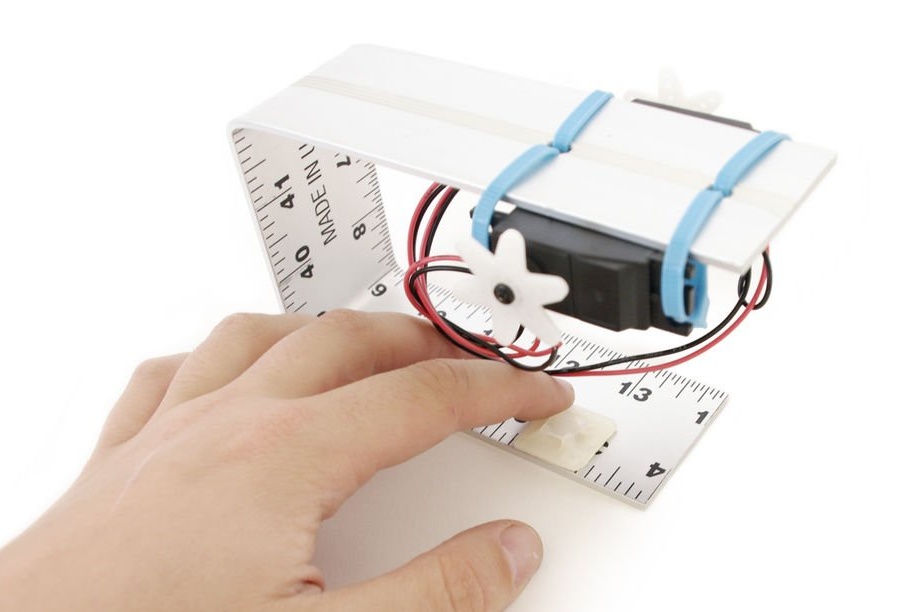
שלב 15: זמירה


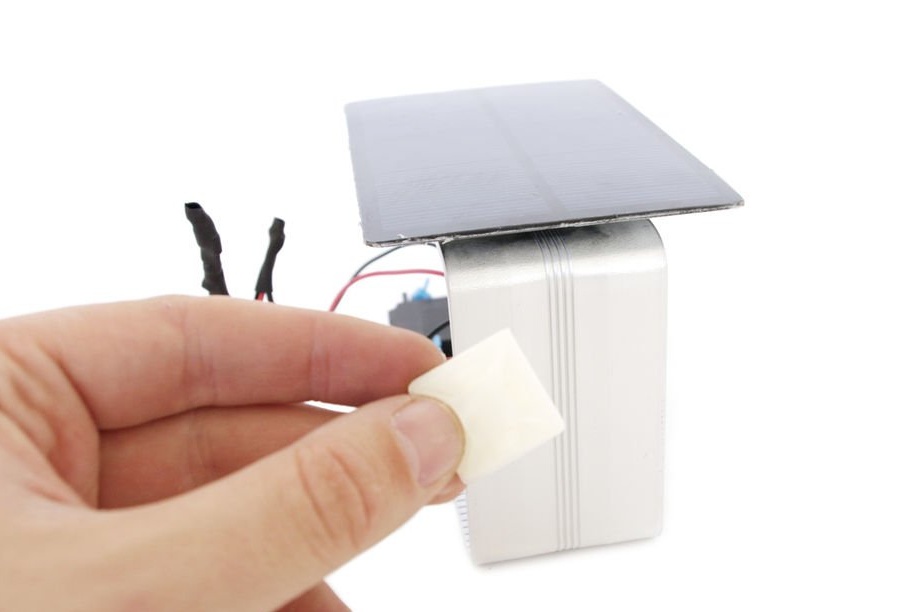
חותכים את הווים על תליוני קיר הפלסטיק.
שלב 16: גלגלים
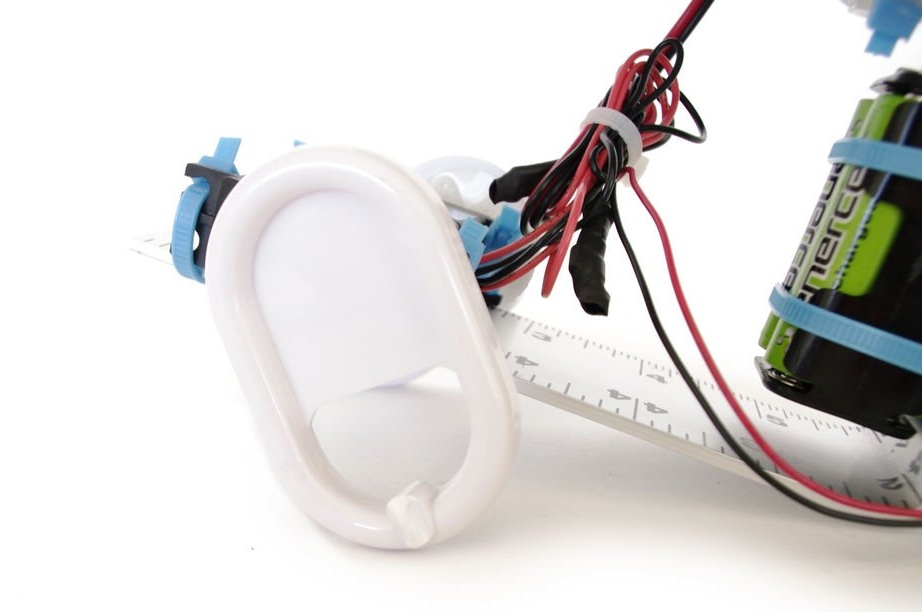
הדבק את תקעי הקיר להילוכים החיצוניים של סרוו (זה יהיה כמו גלגלים).
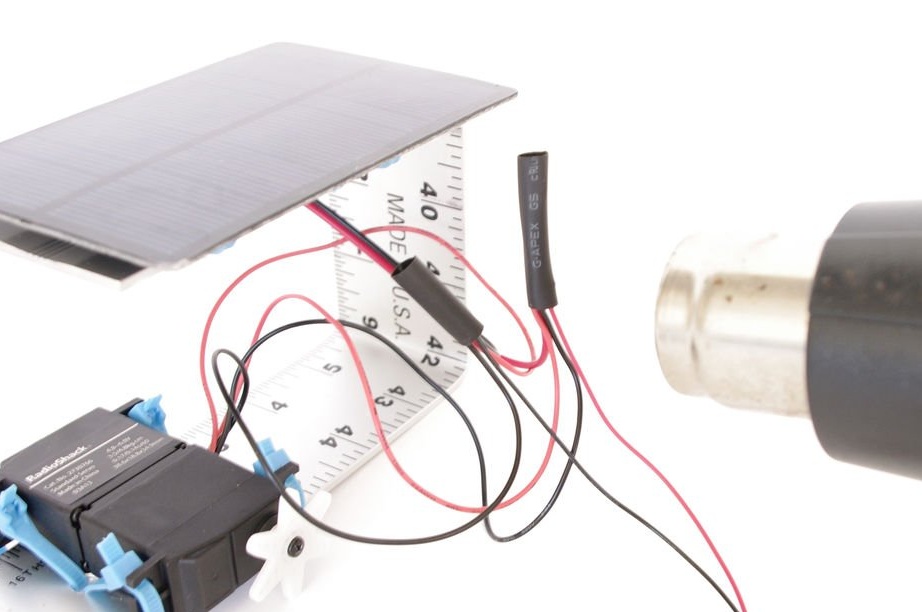
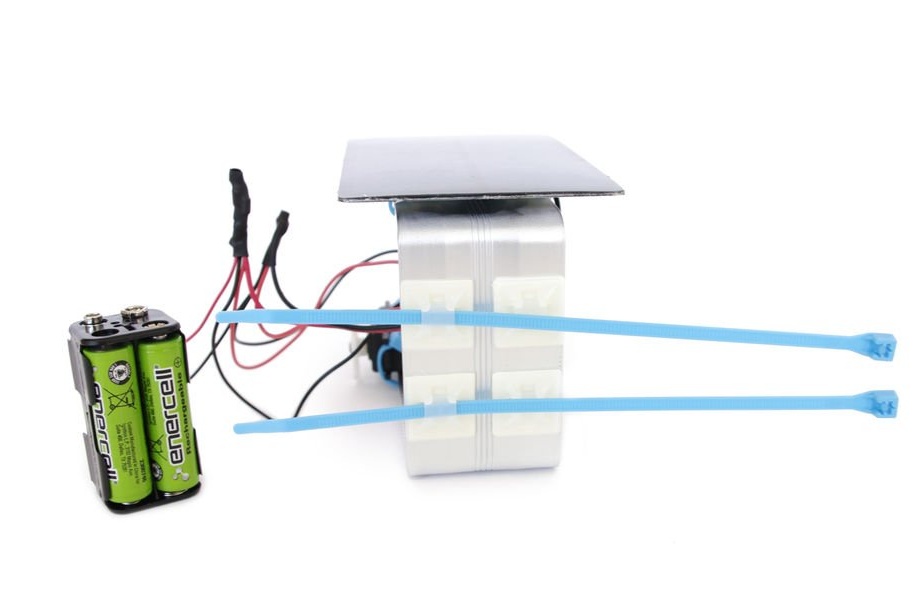
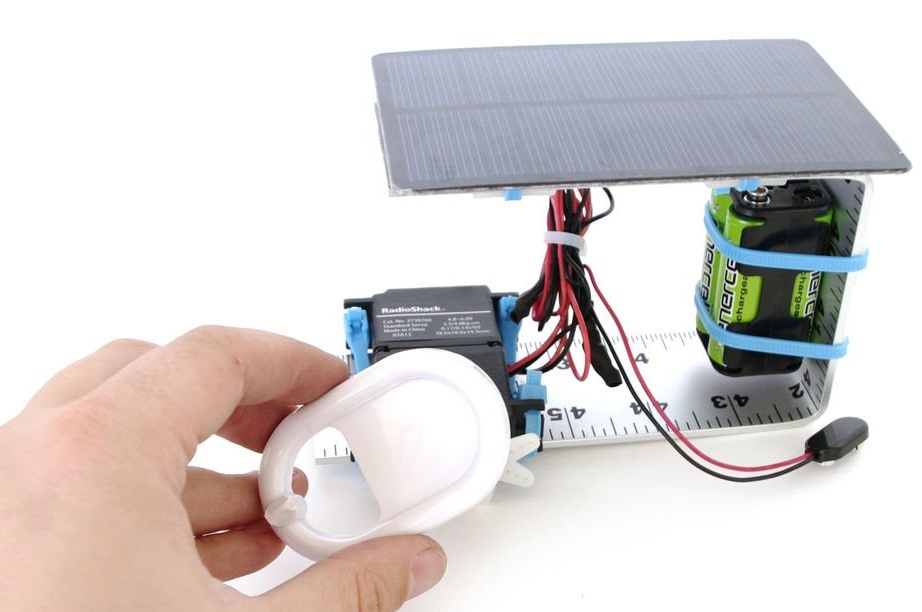
שלב 17: הפעל!

חבר את המוליך לחבילת הסוללה והרובוט יתחיל לנוע.