ההליכה שלו דומה מאוד לג'וק אמיתי. בזמן ההליכה הוא מתנדנד קצת צועד בביטחון קדימה. התיקן כולל מינימום חלקים מורכבים והוא קל מאוד לייצור.
מבחן וידאו
בסרטון נראה ג'וק מכני מזוויות שונות במהלך פעולתו ותנועתו.
2. מאפיינים ותכונות.
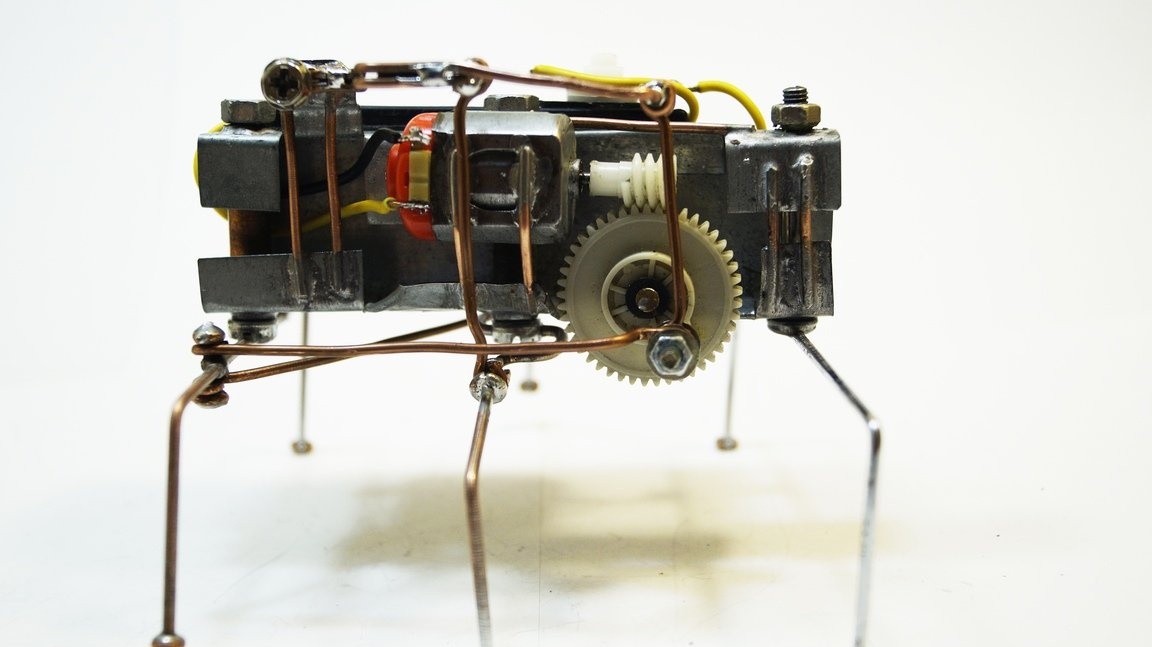
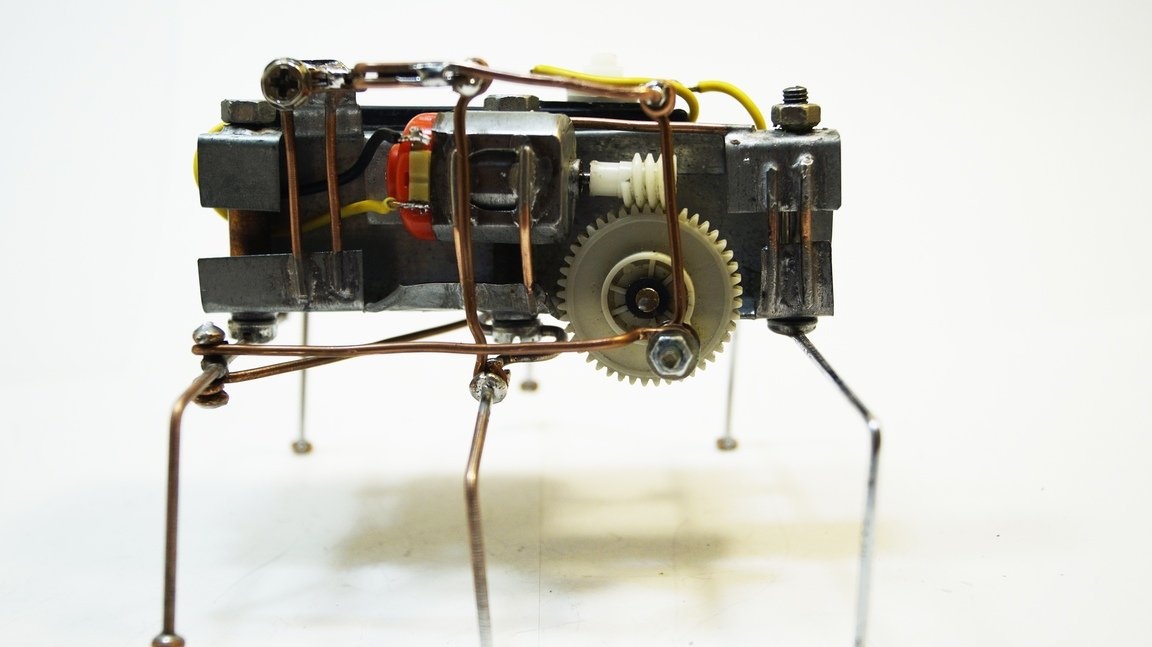
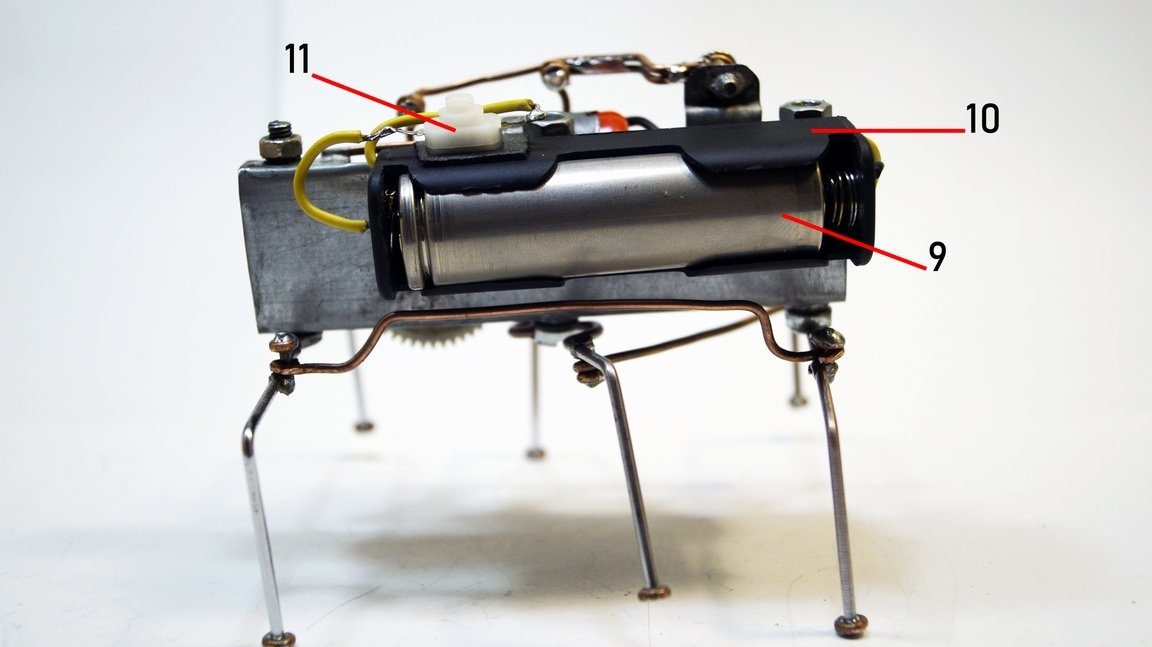
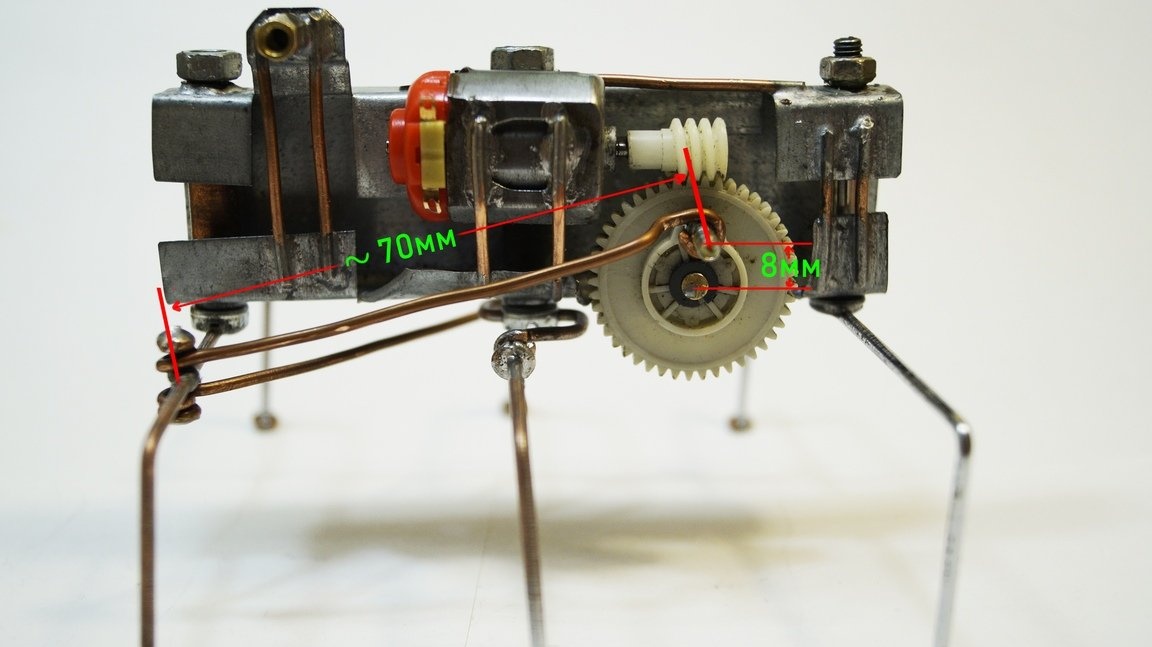
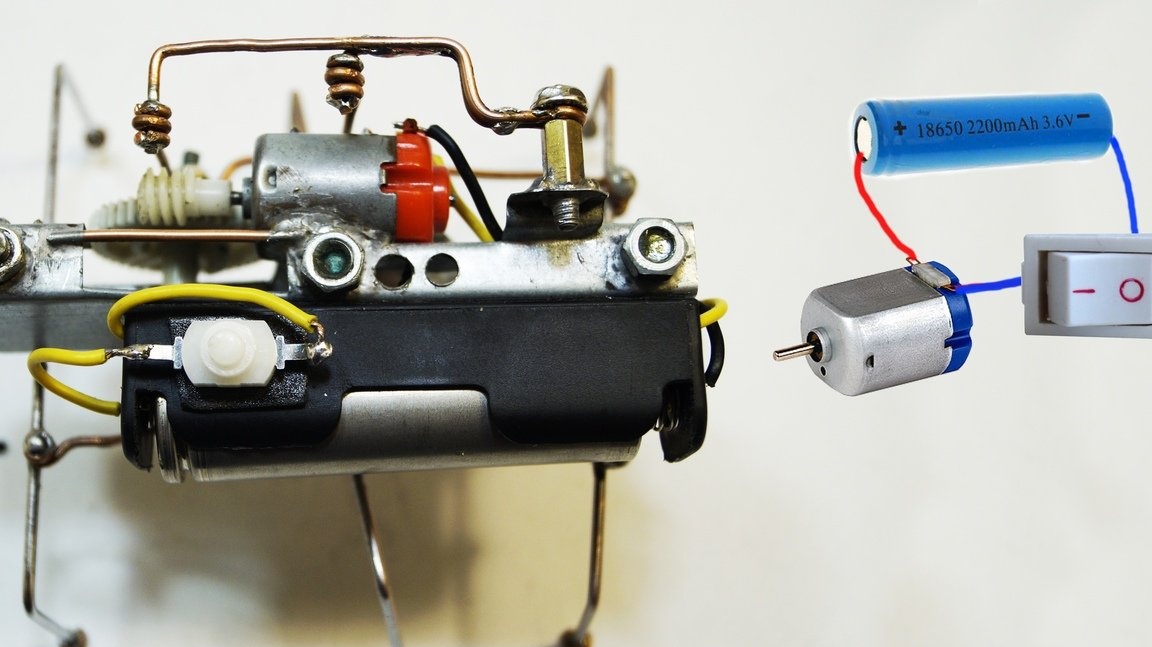
על תמונה 1. התיקן המכני מוצג, מבט לצדדי. על תמונה 2. התצוגה העליונה מוצגת.
תמונה 1.
תמונה 2.
תכנון כמסגרת נעשה שימוש בפרופיל ppn-2 30X20. המנוע והמפרקים האחרים הותקנו על ידי הלחמה. כפות ג'וק מהודקות עם ברגי M6. כפתור ההפעלה ותא הסוללה מודבקים לקלטת דו צדדית. כמתיחה להנעת רגלי ג'וק, נעשה שימוש בכבל נחושת בחתך של 2.5 מ"מ.
מנוע וסורקים. ציר המנוע והארכובה מולחמים למסגרת ב- POS-61, הלחמת ZnCl (אבץ כלוריד). כדי להגדיל את המומנט ולהקטין את הגודל, נעשה שימוש בציוד תולעת.
תזונה. הסוללה של 18650 שימשה ככוח הרובוט.מקור הכוח הוא 3.7 וולט.
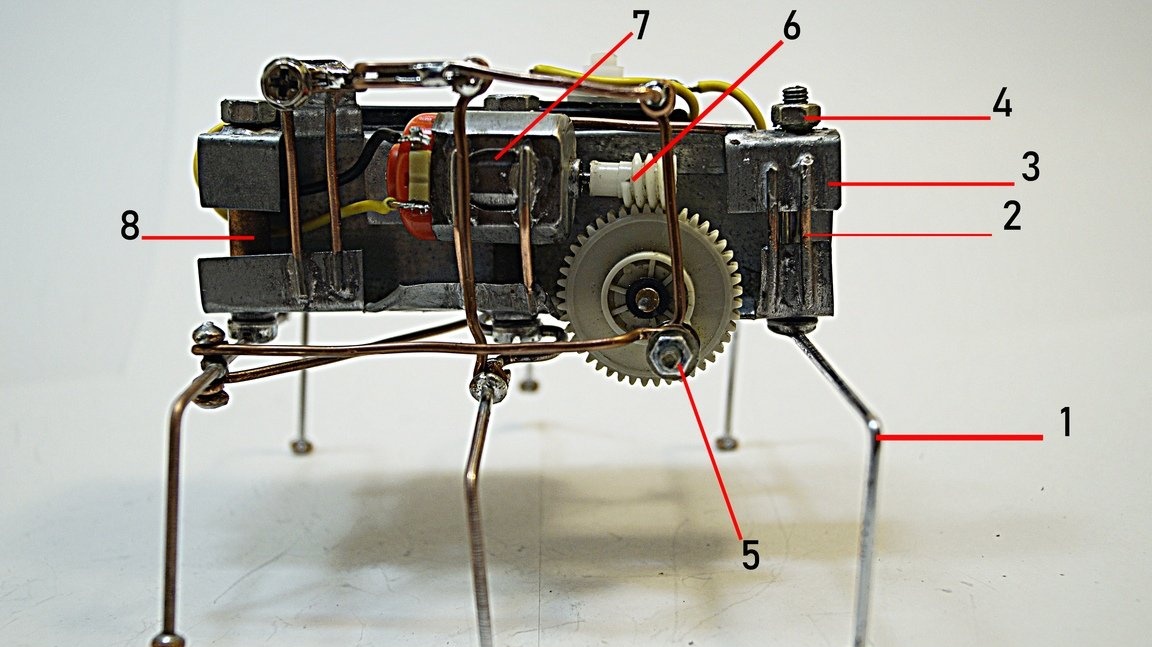
פרטים על עיצוב רובוט
1. כפות ג'וק.
2. הקשיח.
3. המסגרת.
4. ציר הכפות של ג'וק.
5. מנגנון הארכובה.
6. כונן תולעת.
7. מנוע חשמלי F130 5 V.
8. ציר השרוול של כפות התיקן.
9. סוג סוללה 18650, 3.7 V.
10. תא סוללה.
11. לחצן הפעלה.
3. עקרון העבודה.
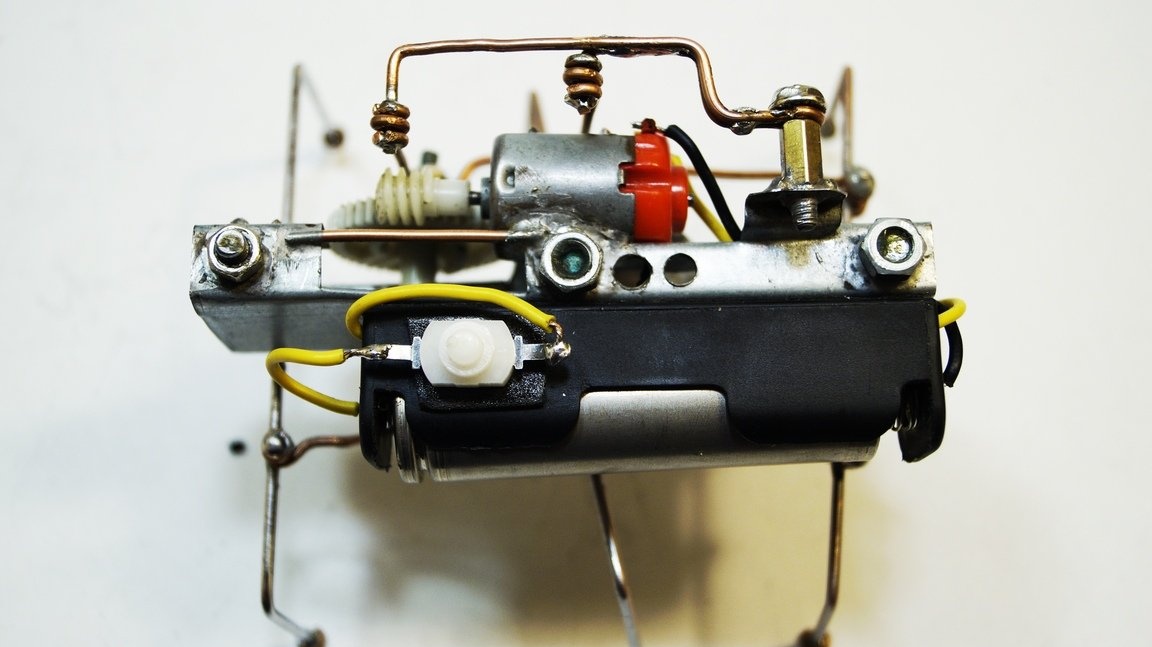
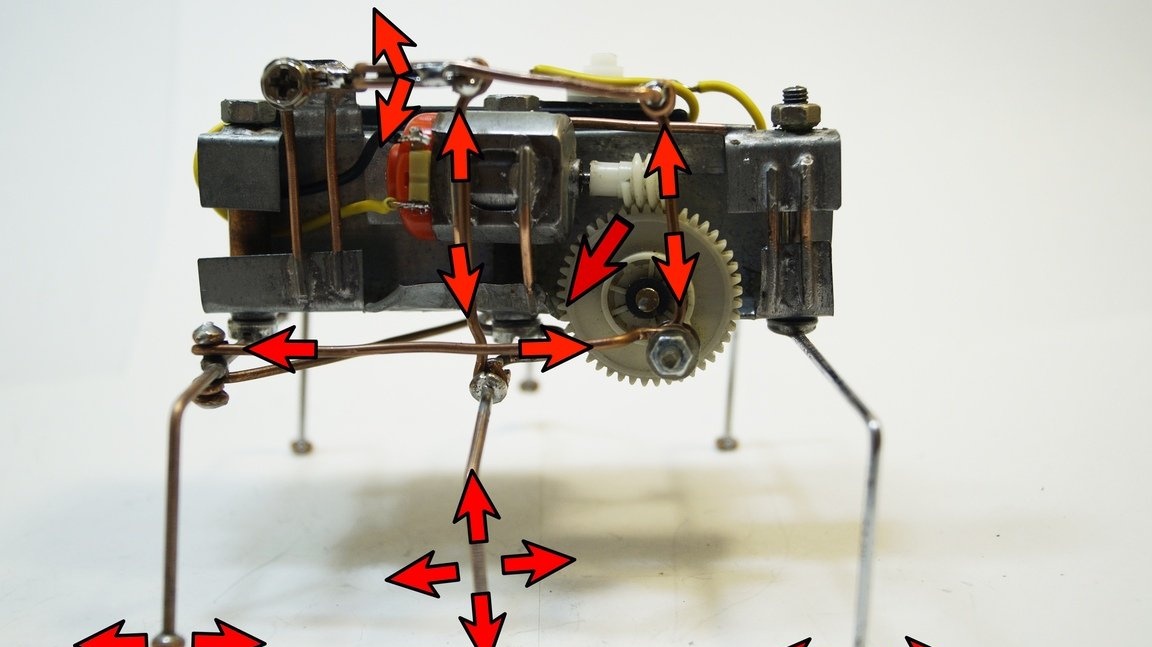
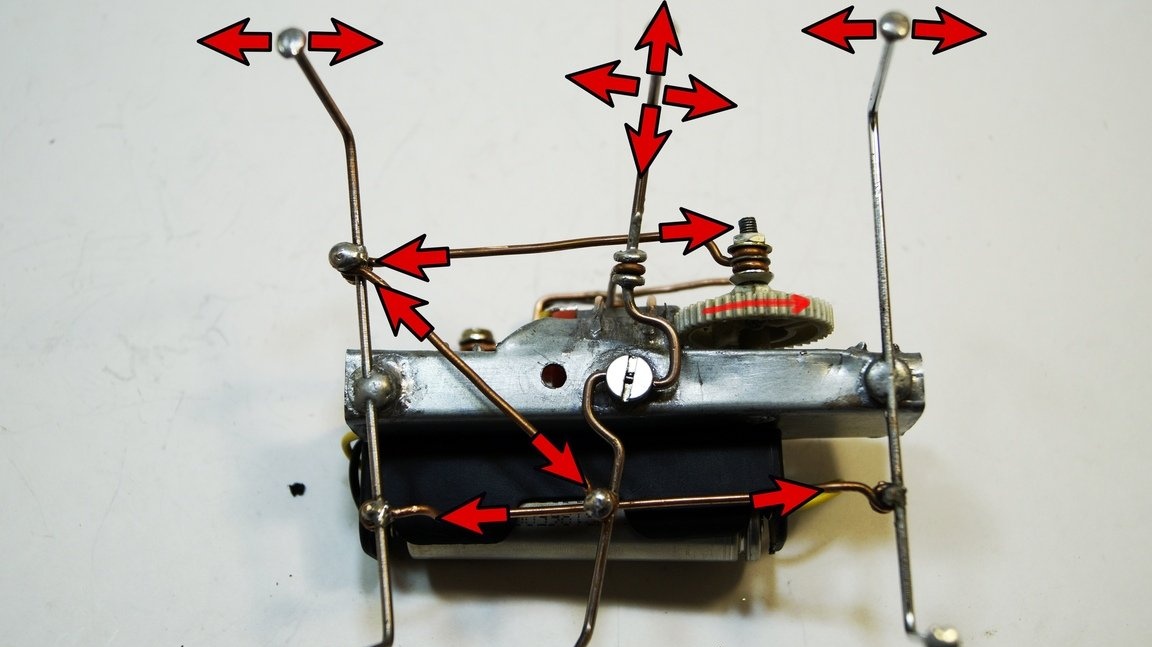
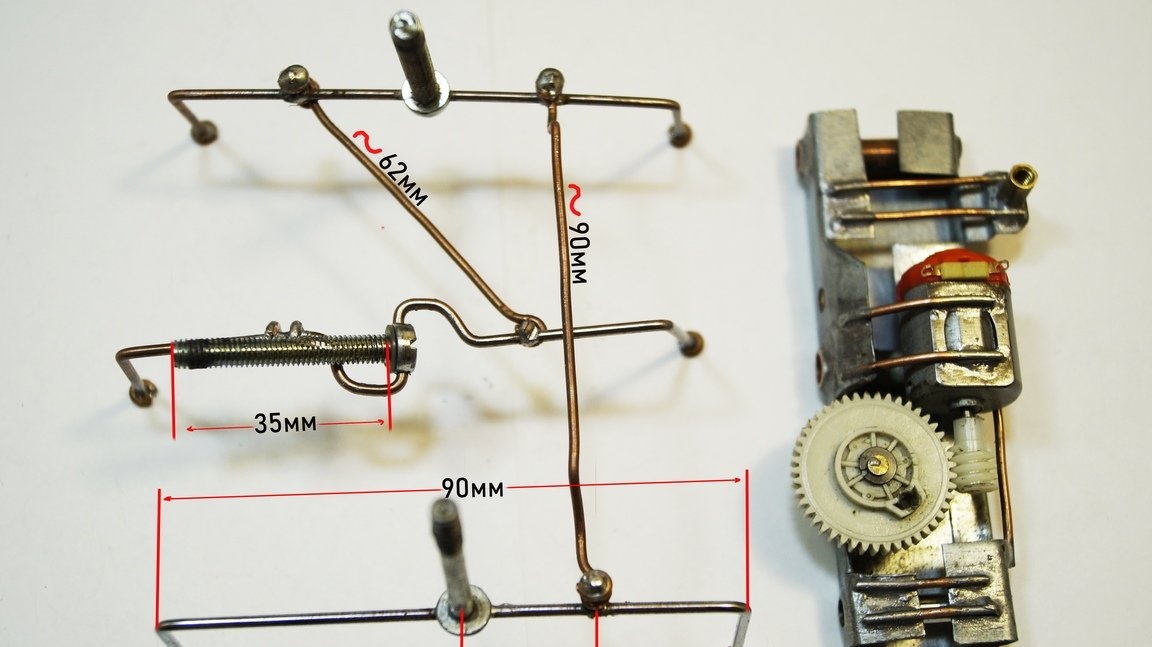
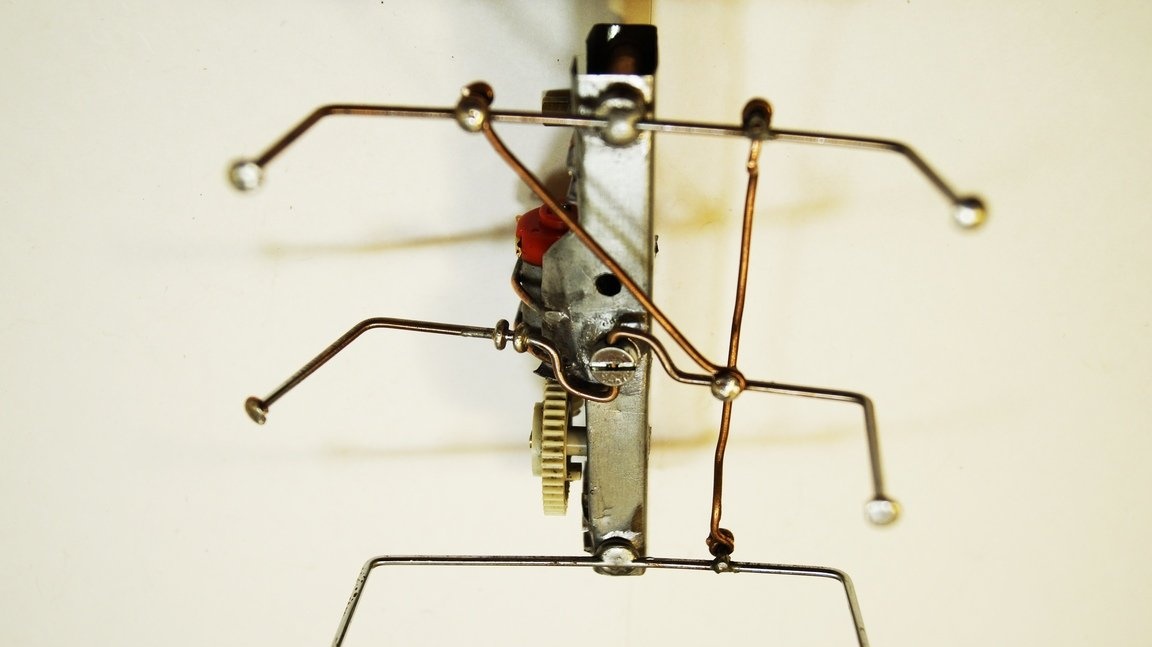
על תמונה 3. 4. מוצג עקרון העבודה של חלקים מכניים של ג'וק. כדאי לזכור כי הרגליים הקדמיות והאחוריות של הרובוט נעות אופקית, והרגליים האמצעיות נעות אנכית ואופקית.
הכוח מועבר למנוע החשמלי דרך המפתח, המנוע מסובב את מנגנון הארכובה. הארכובה מניעה את הכפה הקדמית דרך מתיחה, בהתאמה מהכפה הקדמית, הדחף דוחף את הכפה האחורית (הם נעים באופן סינכרוני). זוג הכפות האמצעיות מחובר לזוג הראשון, לרוחב (הם נעים באנטיפזה).
כדי להזיז את זוג הכפות האמצעיות בצורה אנכית, מוצב מנוף מעל המנוע, המונע בתנועה ממנגנון הארכובה.
תמונה 3
תמונה 4
4. חומרים וכלים.
1. מלחם הלחמה 50W.
2. תא סוללה.
3. Prysoy POS-61.
4. חוט נחושת עם חתך של 2.5 מ"מ.
5. הלחמת חומצה ZnCl (כלוריד אבץ)
6. מנוע חשמלי F130 5V.
7. מספריים למתכת.
8. כונן תולעת.
9. צבת.
10. צינור פלדה, קוטר 80 מ"מ.
11. סוללה נטענת 18650.
12.Profile PPN-2 30X20.
וגם: (כפתור הפעלה, סרט דו צדדי, חוט הרכבה)

5. הוראות הרכבה.
1. הכנת מסגרת ג'וקים.
צייר את הסימון על הפרופיל כמצוין בתמונה 5.
תמונה 5.
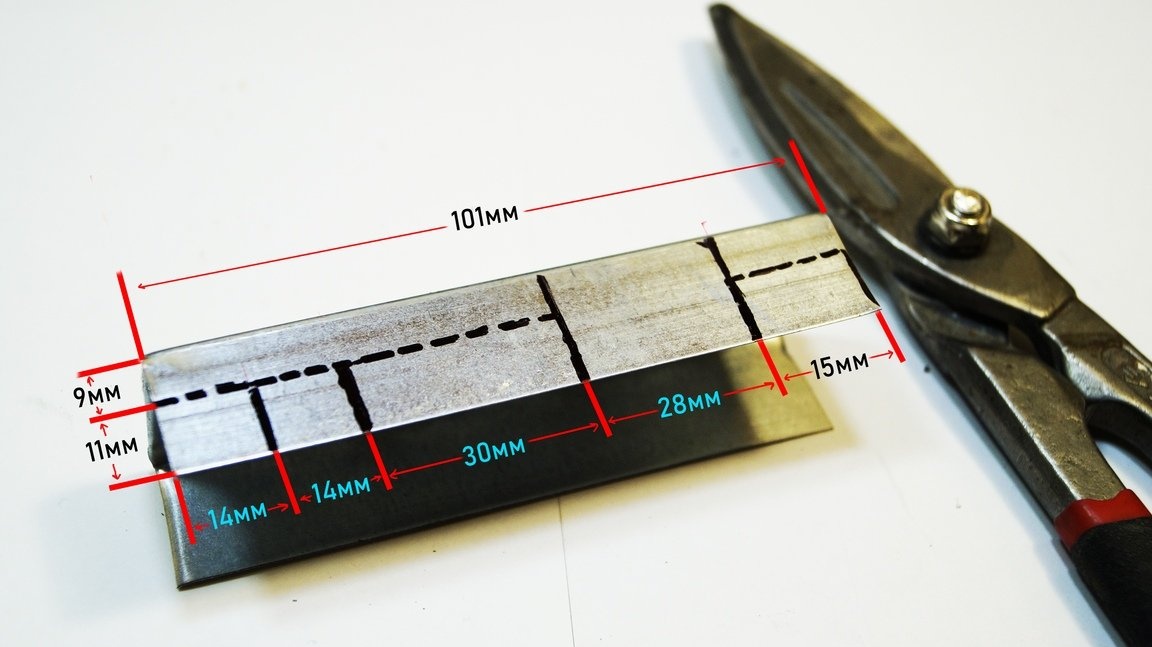
בעזרת מספריים למתכת, אנו חותכים וכופפים את חומר העבודה בעזרת צבת כמוצג בתמונה 6. סמן את החלק התחתון כמצוין בתמונה 6. כופפו את הפרופיל עם צבת כמו בתמונה 7.
תמונה 6.
תמונה 7.
2. מנוע חשמלי וציר כננת.
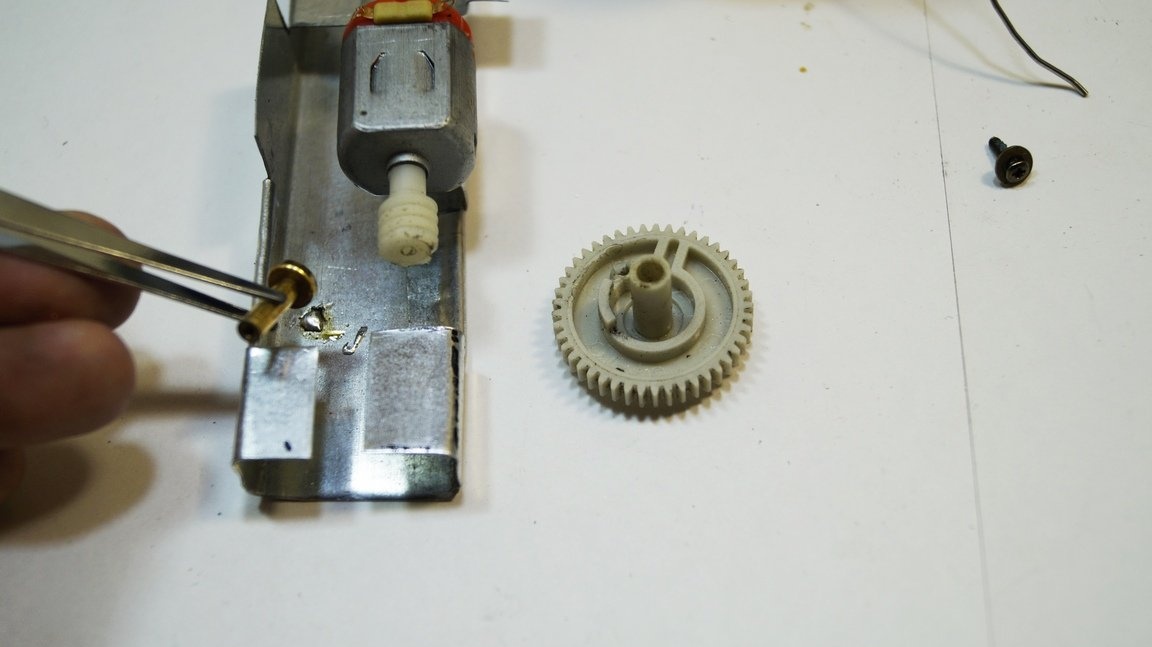
השלב הבא הוא הלחמת המנוע החשמלי למסגרת. יהיה צורך לפרק את המנוע לפני ההלחמה. אנו מציגים את דיור המנוע ואת המסגרת במגהץ הלחמה תמונה 8.
אנו מכהנים את מעטפת המנוע החשמלי ואת המסגרות יחד ומחממים היטב את החלקים במגהץ, לוחצים אותם זה לזה בתצלום 9. !!! היו זהירים, פרטים שחומם הרבה יותר מחומם !!!
תמונה 9.
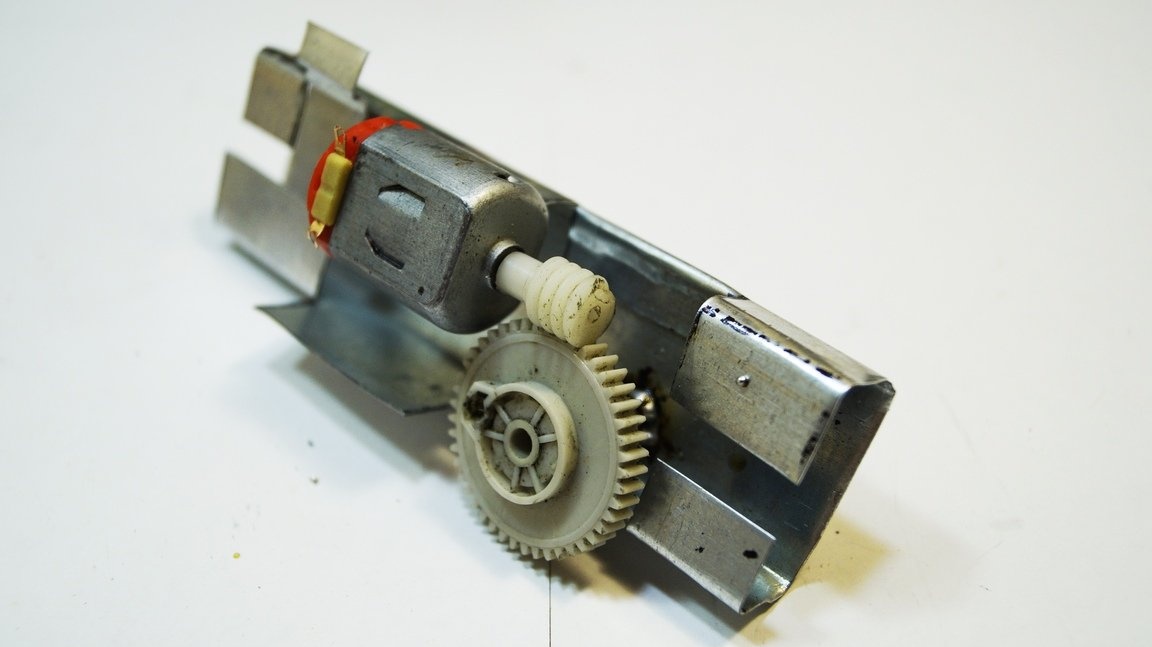
החזרת המנוע החשמלי לאחור. אנו מבצעים הלחמה של ציר הארכובה במקום, הדבר נעשה בניסיון. יש להתאים היטב את ציוד התולעת, אין להעביר את ההילוכים. תמונה 10.11.
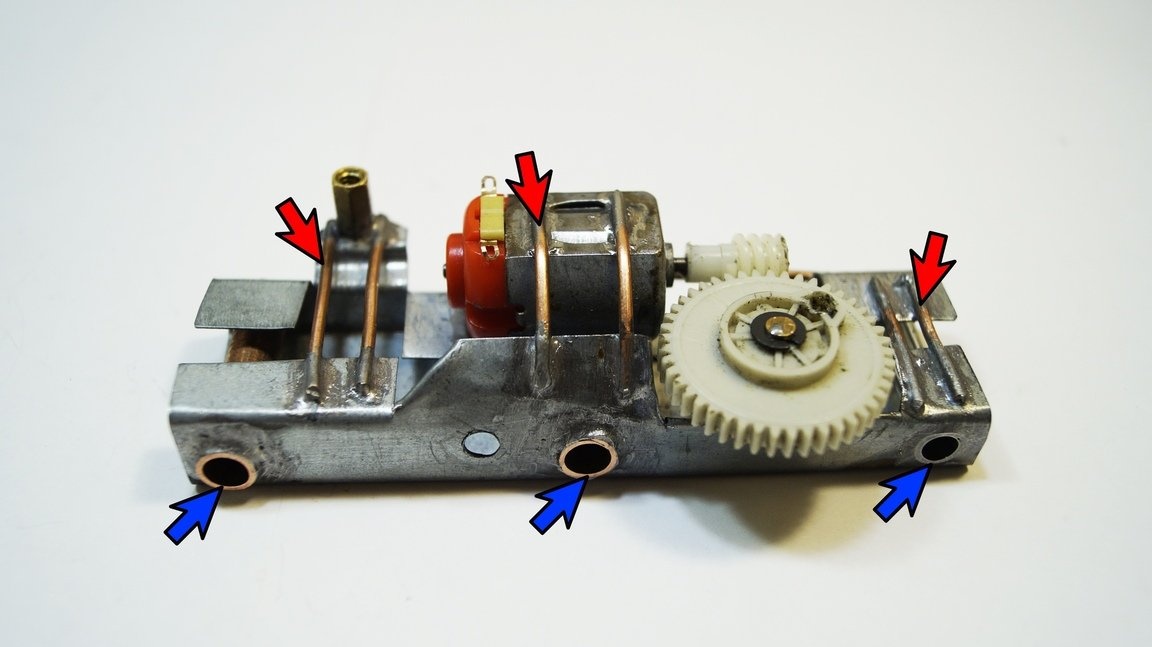
3. חורים לרגליים של ג'וק.
כדי לחבר את כפות התיקן למסגרת, אתה צריך לקדוח חורים בעזרת מקדחה של 8 מ"מ. אנו מקדחים חור באוזן מאחורי המנוע החשמלי בעזרת מקדחה 3.2 מ"מ
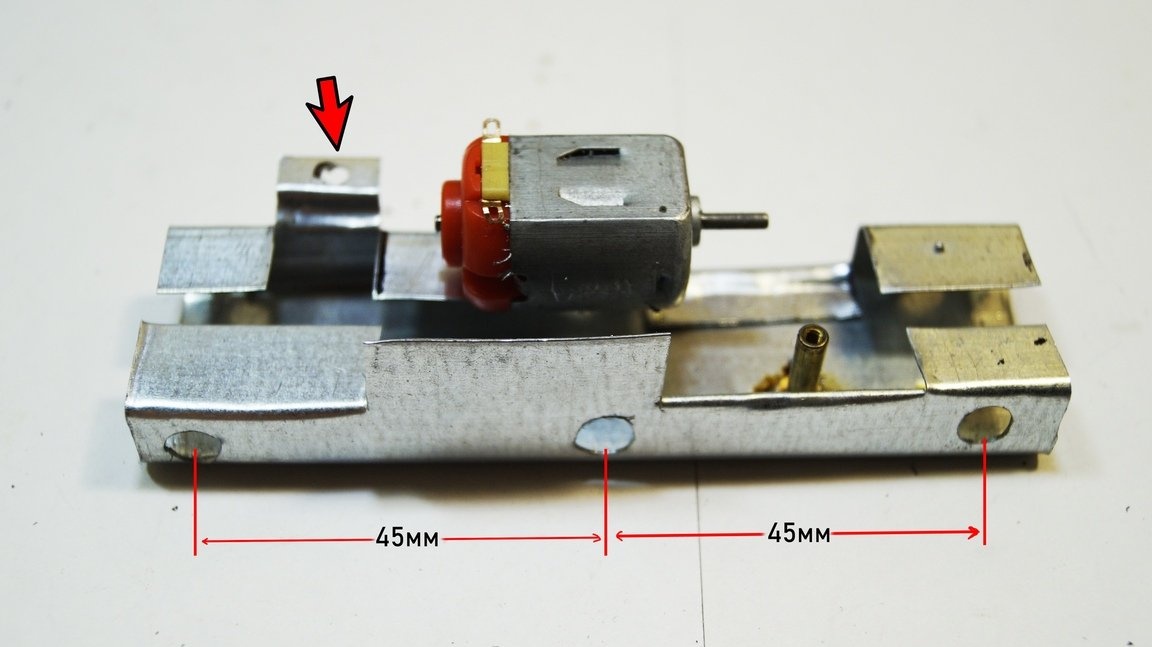
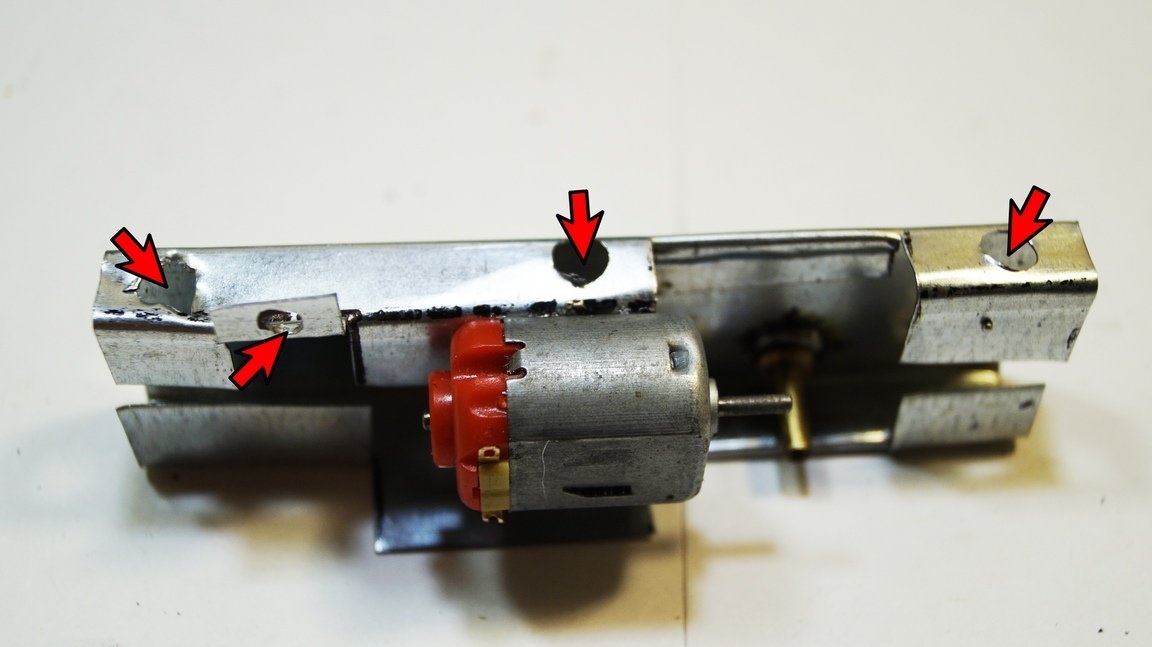
אנו גם מכינים אגוז באוזן מאחורי המנוע החשמלי. הידית האחראית על הרמת הכפות האמצעיות לאורך הציר האנכי תוצמד לאום זה
כדי לחזק את עיצוב המסגרת הוחמרו קשיחים עם חוט נחושת בגודל 2.5 מ"מ.
תותבים של 8 מ"מ הודבקו גם הם בנקודות ההחזקה של כפות התיקן. תמונה 15.
4. כפות ג'וק.
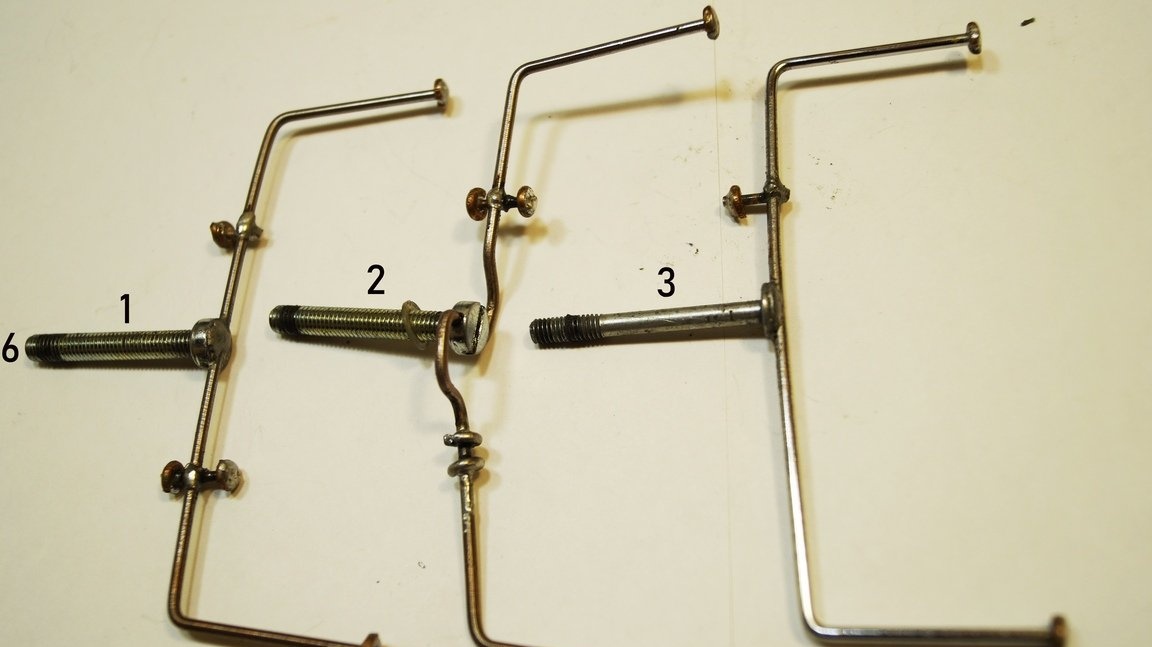
חוט מתכת בקוטר 3 מ"מ שימש ככפות ג'וקים. הוא מולחם לראשו של בורג M6. צילום 16. זוג הכפות התיקיות האמצעיות נוצר באופן שונה. נקדח חור בראש הברגה לאורך קוטר החוט. החוט כפוף בצורת האות S, דבר שיאפשר לרגלי התיקן לנוע אנכית.
תמונה 16.
תמונה 17.

להידוק המוטות, חוט נחושת באורך 2.5 מ"מ חתך באורך 12 מ"מ, מולחם אל כפות התיקן, טבעות נחושת מולחמות עד קצותיו. המוטות עשויים חוטי נחושת עם חתך רוחב של 2.5 מ"מ. מידותיהם משוערות. רצוי לכופף את החוט כך שבעתיד הייתה אפשרות להתאמה לאורכה של תמונה 18.
תצלום 19 מראה מבט תחתון עם כפות על גבי המסגרת.
אנו מקימים מתיחה ממנגנון הארכובה לרגליים הקדמיות של התיקן. אנו מבצעים דחף עם מכפלת לצורך היכולת להתאים אותו. רדיוס כננת 8 מ"מ צילום 20.
אנו מייצרים מנוף להזזת הכפות האמצעיות אנכית מחוט נחושת. תמונה 21.22.
זה משלים את החלק המכני של התיקן.
תמונה 21.

תמונה 22. מיקום הכפות במיקום התחתון של פיר הארכובה מוצג.
תמונה 22.

5. החלק החשמלי.
הדביק את תא הסוללה על סרט דו צדדי למסגרת התיקן. הדבק את לחצן ההפעלה בתא הסוללה. אנו מבצעים הלחמה של כל האלמנטים של תמונה 23.
הרובוט - התיקן מוכן !!!