
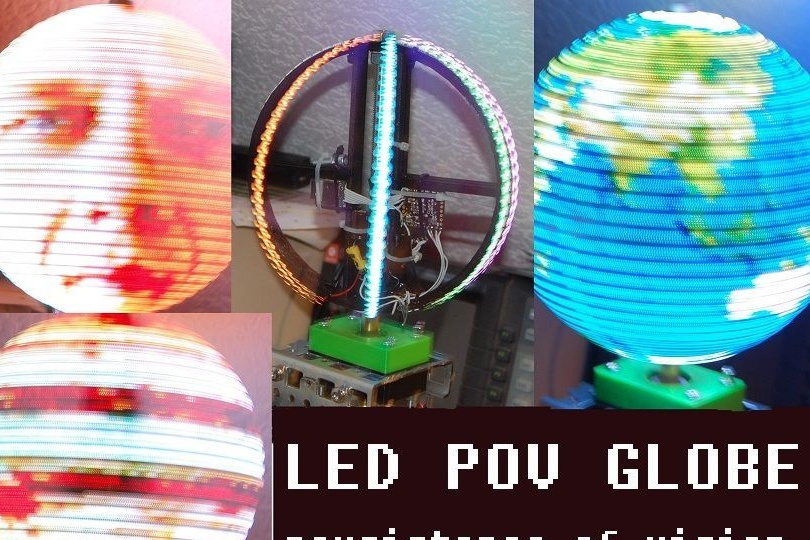
מדריך זה עוסק בבניית גלובוס POV עם פחות. אלקטרוני רכיבים מאשר מכשירים דומים אחרים. באמצעות נוריות RGB עם בקר משולב APA102. זה יחסוך לך הלחמה של חוטים רבים. תוכלו לקרוא עליהם יותר. נוריות לד אלה אינן זקוקות למנהל התקן נוסף. הם מחוברים ישירות למיקרו-בקר בשתי דרכים. זה מאפשר לך להחליף נוריות במהירות רבה. כדי לקבל תמונה יציבה, סנכרון SPI מגיע בתדר של 10 מגהרץ. פלוס נוסף לעיצוב זה הוא השימוש בכרטיס פלאש, המאחסן את התמונה בפורמט BMP.
1 חומרים נדרשים

עבור ציר כדור הארץ תצטרך:

1. הרבעה עם חוט M8 ואורך של 250 מ"מ
2. אגוז M8
3. שרוול פליז באורך 10 מ"מ ואורך 100 מ"מ
4. מכבשי פלסטיק 8 מ"מ 2 חלקים (קבצי STL כלולים)
5. צימוד למי שישתמש במנוע צעד NEMA 17
כדי להניע את טבעת LED על הפיר, תצטרך
1. מיסב כדור 6300 (10x35x11)
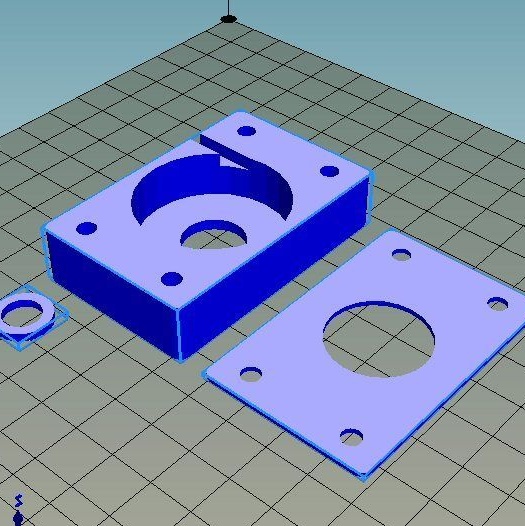
2. שני סוגריים למסבים. מודפס במדפסת תלת מימד או עשוי עץ.
3. ארבעה ברגי M4x40 עם אגוזים
4. טיפים לחוטים 2 יחידות 8 מ"מ
5. בקוטר פיר של 5 מ"מ
6. 4 ברגים M4 להתקנת המנוע
7. אולי אוהד לזה.
לחלופין, אתה יכול להשתמש בכל מנוע עם מומנט ובקרת מהירות מתאימים. המנוע המשמש בתכנון זה הוא בעל מומנט מרבי בזרם של 50A, אך צריכת הזרם המקסימאלית במהלך הפעולה היא 18A בלבד.
כדי לשלוט במנהל התקן השרת, השתמש
1.
2. שני כפתורים
ספק כוח 12 וולט למנוע ו 5 וולט לד נוריות. כאספקת החשמל, אתה יכול להשתמש ביחידה הישנה מהמחשב האישי. אתה יכול לקנות ספק כוח 12v / 5A ולהתחבר אליו
לטבעת LED תצטרך:
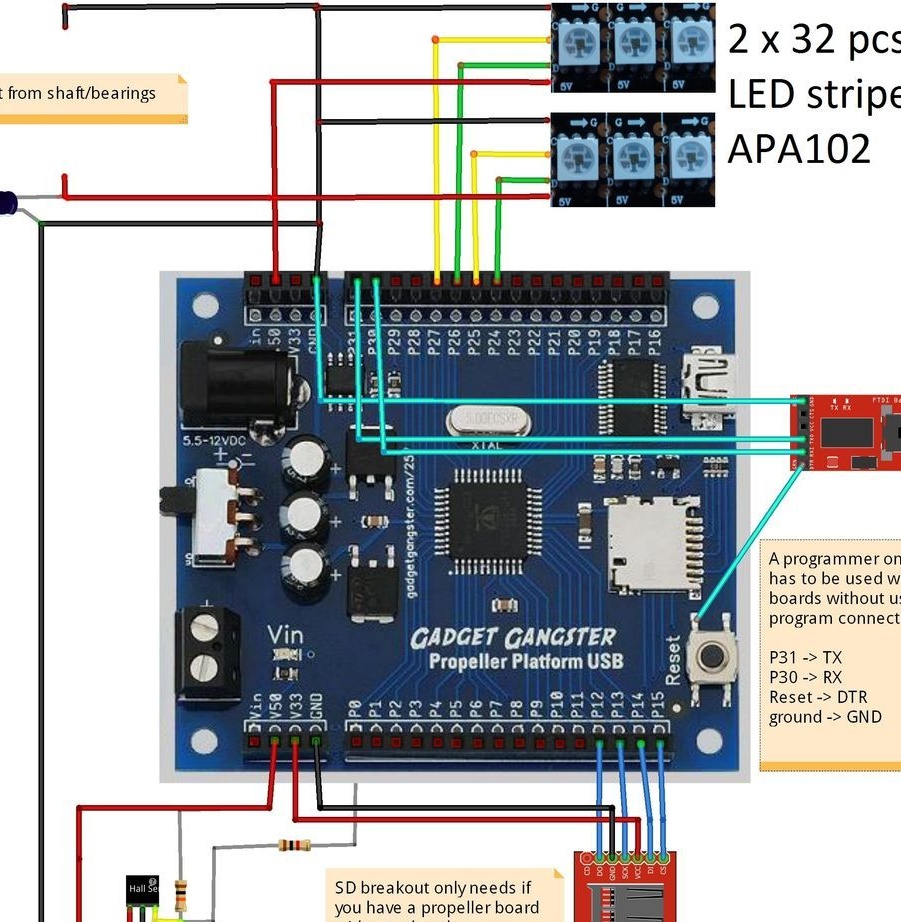
1.664 נוריות לד 2 רצועות בנות 32 חלקים
2. קבל 1000μF 10V
3. חיישן הול ומגנט
4. הנגד למשוך 1k, 10k
5. יש להדפיס את הטבעת במדפסת תלת מימד או להשתמש בחתיכת צינור PVC
6. קשרי פלסטיק (100 מ"מ)
7. דבק טוב שנדבק זה לזה ולא מתפרק במהירות 2500 סל"ד
תצטרך גם בקר מיקרו-מדחף Parallax. או שתוכלו להשתמש באחר המודל אבל קח תשלום נוסף עבור. בקר זה מתוכנת והבהב פשוט כמו ארדואינו. תזדקק למתאם USB-TTL כדי לתכנת את שני הבקרים.
גוף.
דיור ל תוצרת בית אתה יכול לקחת כל דבר קשה מספיק. הדבר החשוב ביותר הוא שתוכלו להדק היטב את המנוע והמסבים.
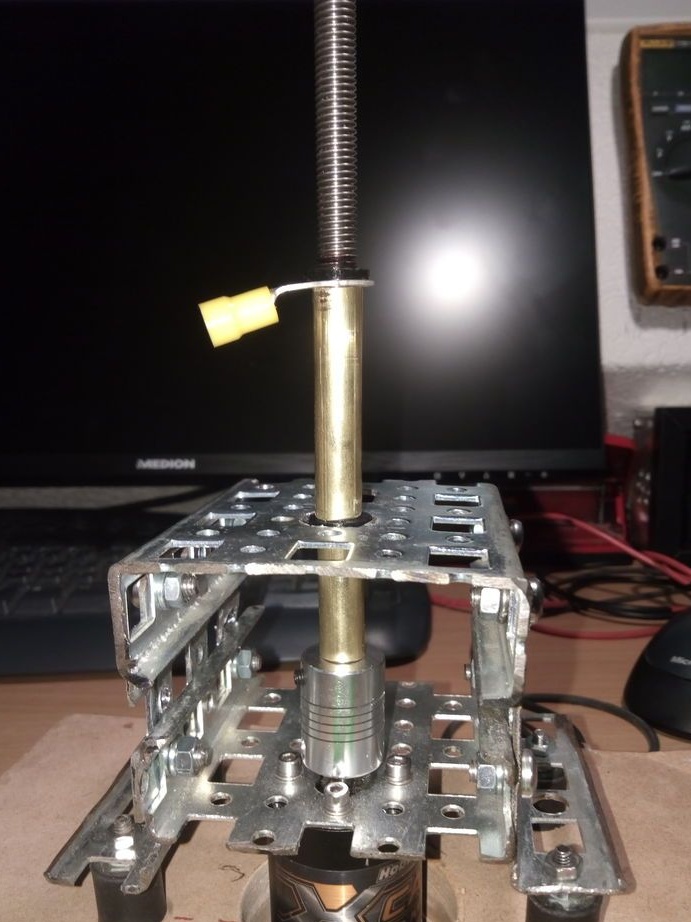
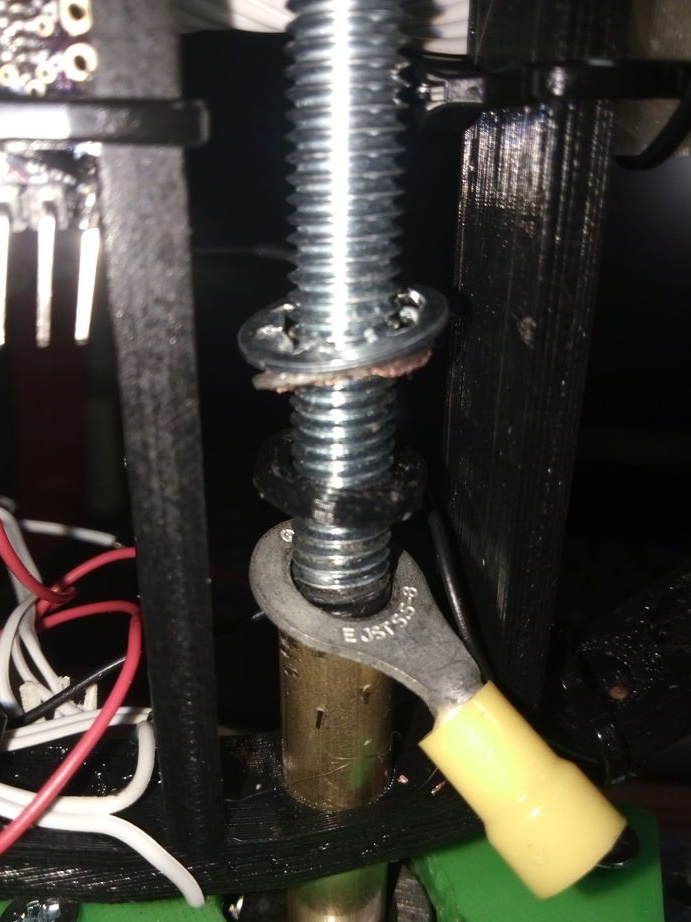
מוט הברגה באורך 250 מ"מ משמש לפיר ההינע.אורך תותבי הפליז הוא 50 ו -30 מ"מ. תלוי בגודל הטבעת ואורך הפיר. יש לבודד את השרוול העליון והארוך מהברדס, מכיוון שהוא משמש לספק חשמל פלוס לנורות הלד. לשם כך, עטפו סרט חשמלי על סיכת שיער או השתמשו בכיווץ חום, יהיה צורך גם בשני מכבשי פלסטיק. צריך לקדוח את השרוול לגודל 8.5-9 מ"מ אחרת הוא לא יתאים. השרוול השני יחד עם המוט יוצרים קשר שלילי.
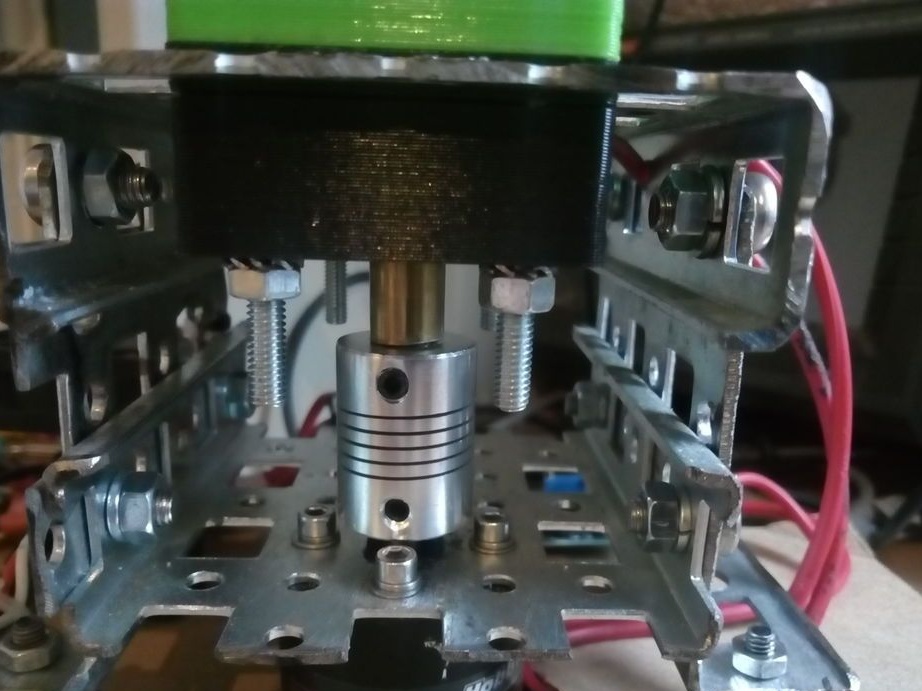
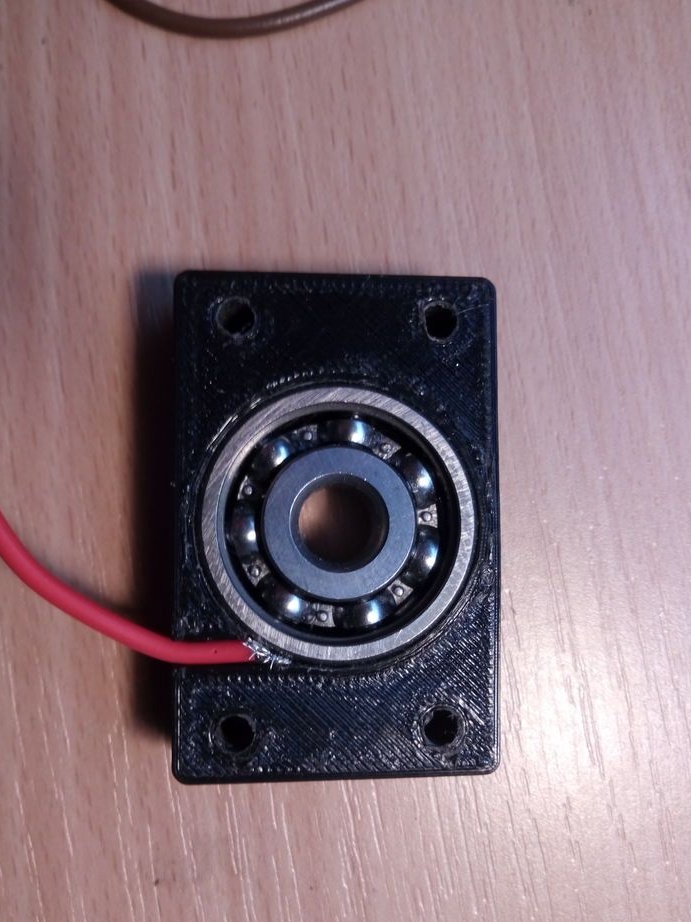
עוצמת המינוס ממוקמת בחריץ מיוחד ולחוצה כנגד המיסב בסוגר, אותו ניתן להדפיס על מדפסת. קובץ STL של סוגר בארכיון.


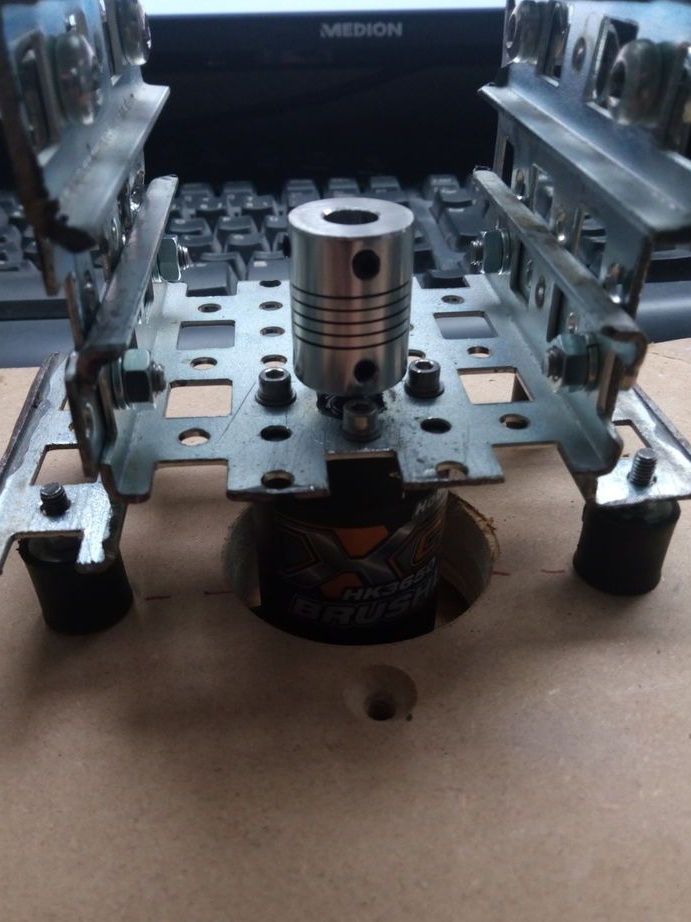
עכשיו אתה צריך לחבר את המנוע החשמלי, כפי שמוצג בתרשים.
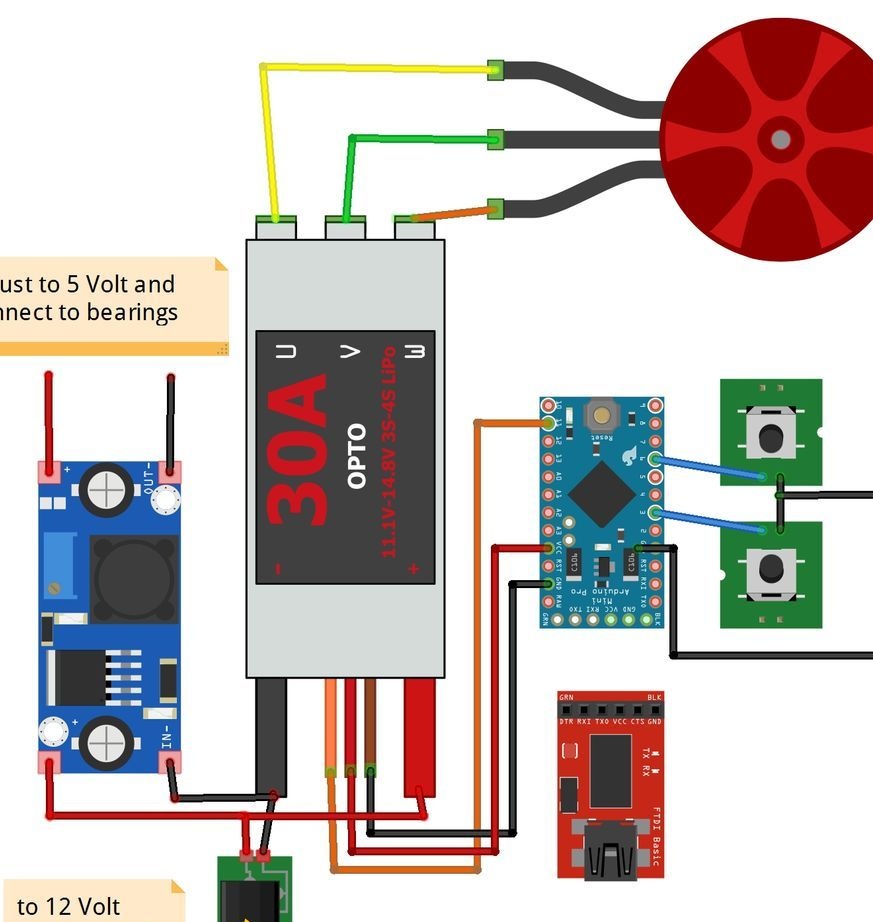
שני כפתורים בתרשים משמשים לכוונון המהירות. כשאתה מפעיל את הכוח, ה- ESC יקבל ערך של 500 מיקרוגרם. לחץ על אחד הכפתורים כדי להפעיל את המנוע. השרטוט ייקח את הערך "StartPos = 625". מאוחר יותר, כשאתה מכוון את המהירות, ניתן לשנות ערך זה. לחץ על הכפתור למשך שתי שניות והמנוע צריך להפסיק.
הרכבת מבנה הליבה.
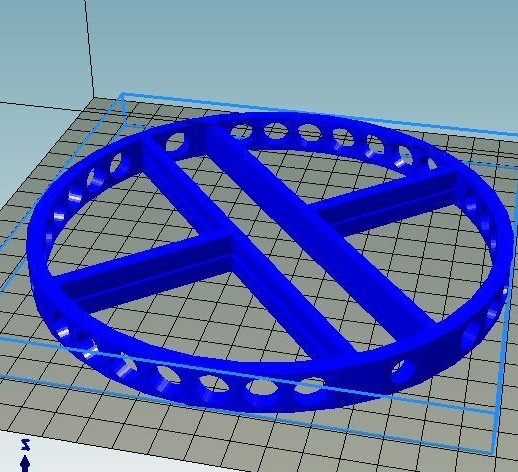

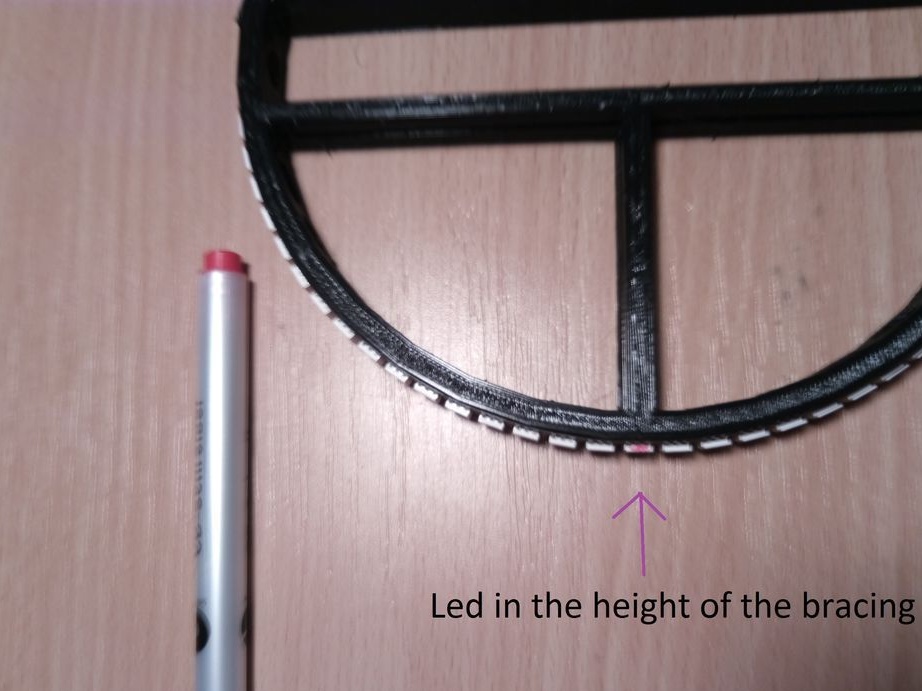
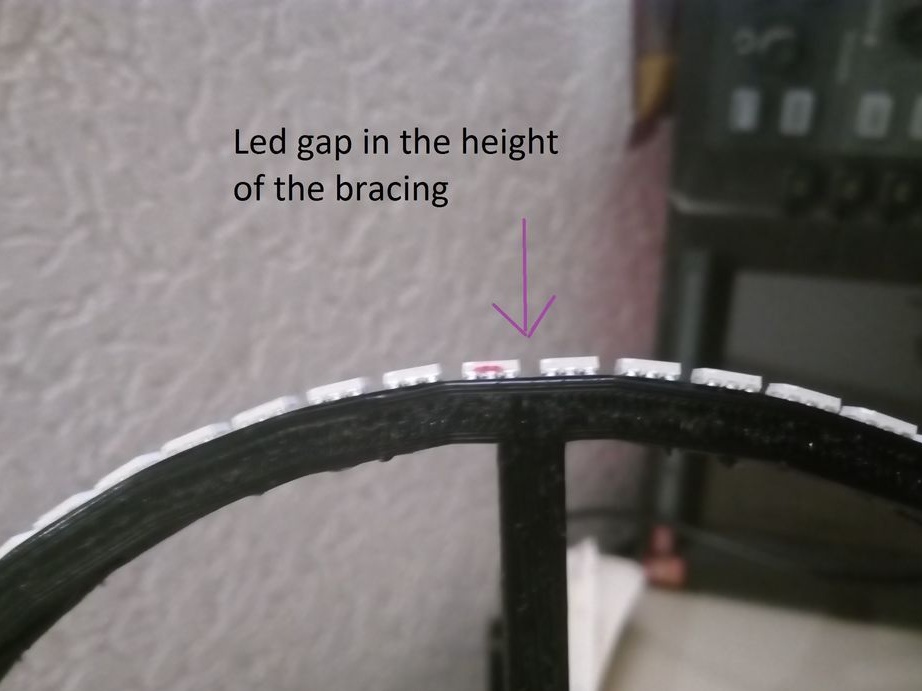


לשם כך, הדפיס את הטבעת עצמה מהקובץ המצורף. הכותב עשה בו חורים רבים כדי להפחית במשקל. אתה יכול להשתמש חתיכת צינור PVC. שתי רצועות בנות 32 נוריות נחתכות. שתי רצועות נוריות LED יוצרים קווים אחדים ומוזרים. סדר את הקלטות כך שנורות הלד של רצועה אחת ממוקמות בין נורות הלד של השנייה, אך מאחור. לאחר הידקת הקלטת, תוכלו לחבר את נוריות לוח הבקרה. ואז אתה צריך לאזן את כל המכלול.
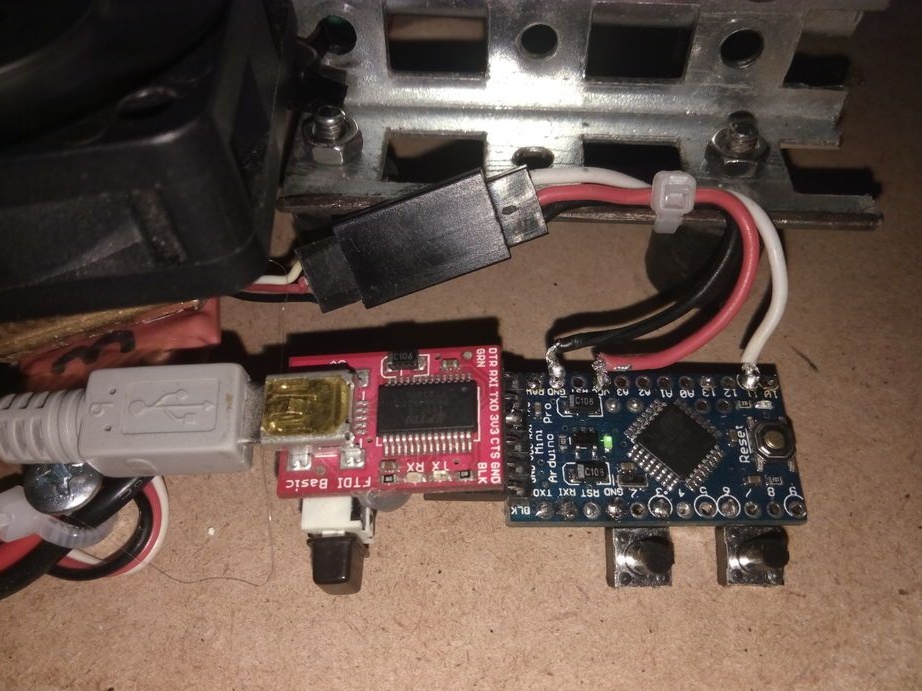
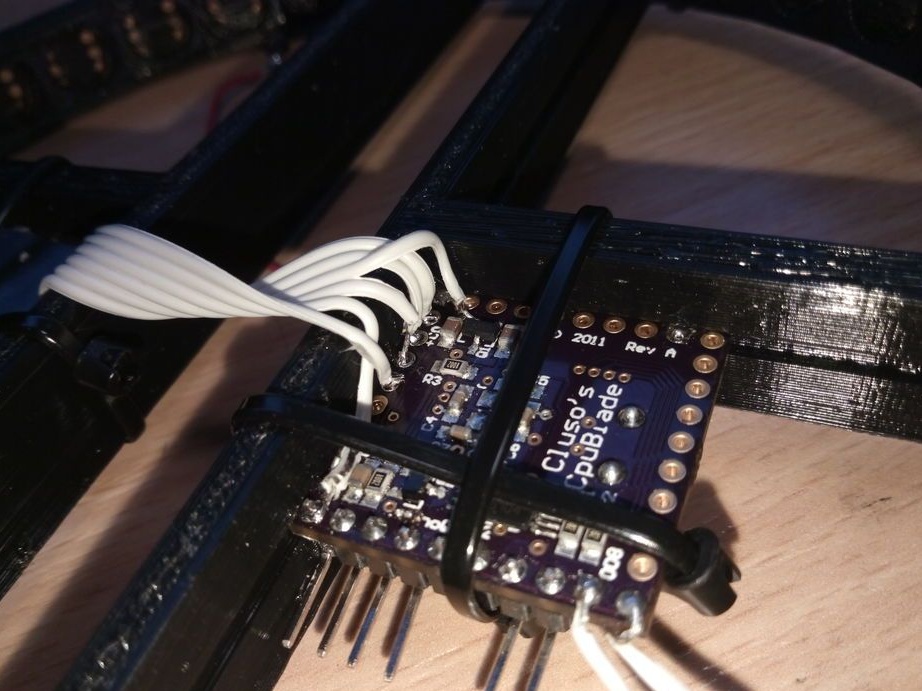
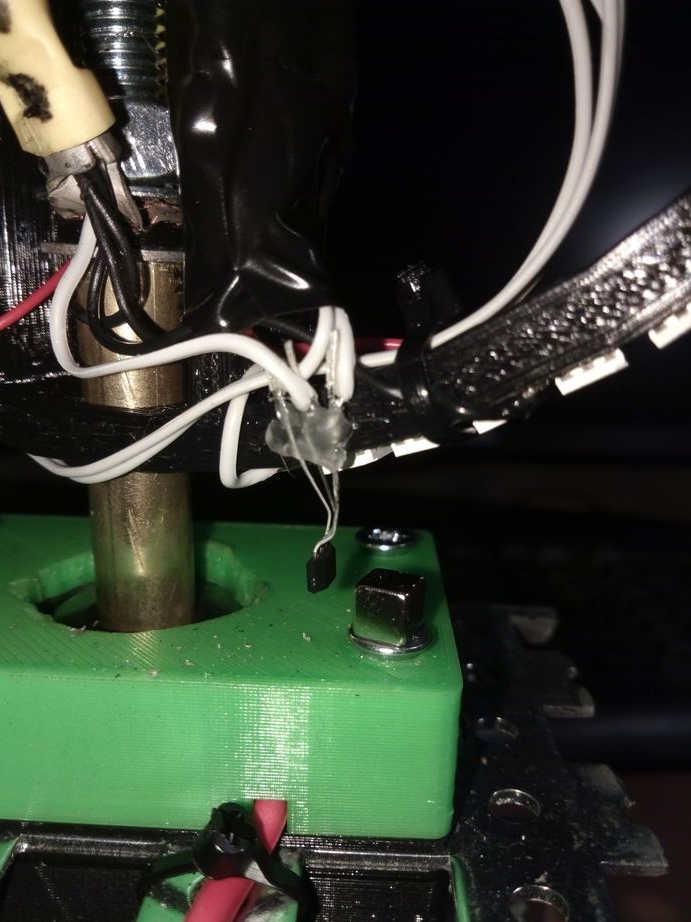
התמונות שלהלן מראות כיצד לחבר את כל רכיבי המכשיר זה לזה. בתמונה מוצג גם חיישן האולם המותקן עם מגנט.
לתכנת Parallax Propeller Microcontroller שאתה זקוק לו
אל תחבר את הציוד שלך ליציאת USB או יציאה טורית עד להתקנת התוכנה. ניתן למצוא פרטים נוספים על העלאת קושחה לפרלקס
המחבר משתמש בלוח MCU ישן יותר, ובהתאם פחות חסכוני, מבחינת צריכת אנרגיה מכיוון שהוא לא יכול למצוא ספריות חדשות בלוחות הבקר החדשים.
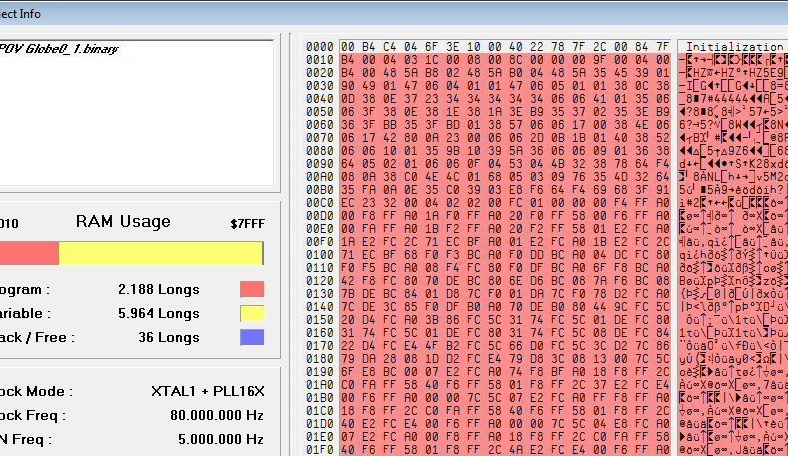
לאחר שתאסוף ותחבר הכל, עליך לתכנת את הבקר. הכותב עושה זאת בעזרתו. קבצים עם קושחה בארכיון.
כעת תוכלו לנסות להפעיל את המכשיר. מההתחלה, העתק את תמונת הבדיקה לכרטיס ה- SD והדבק אותה בחריץ.
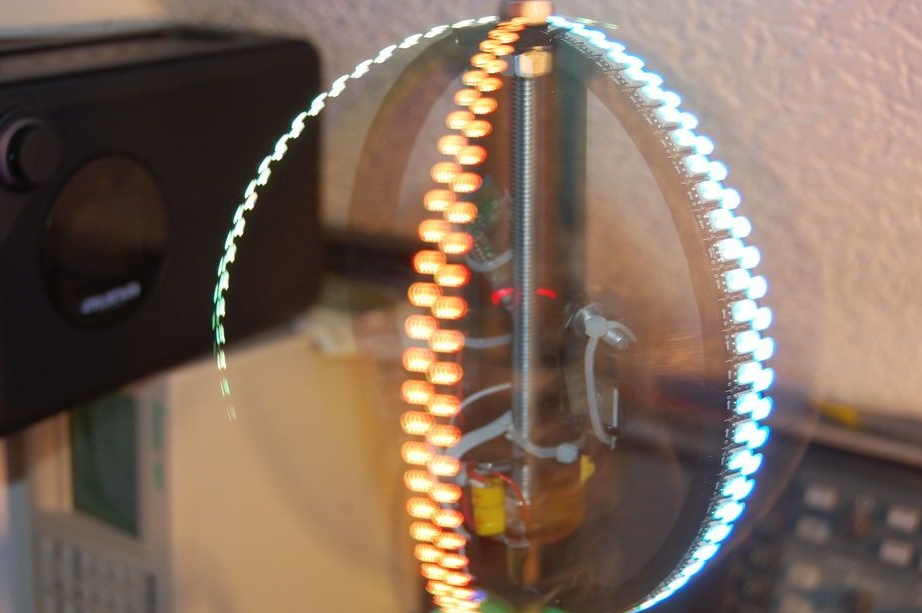
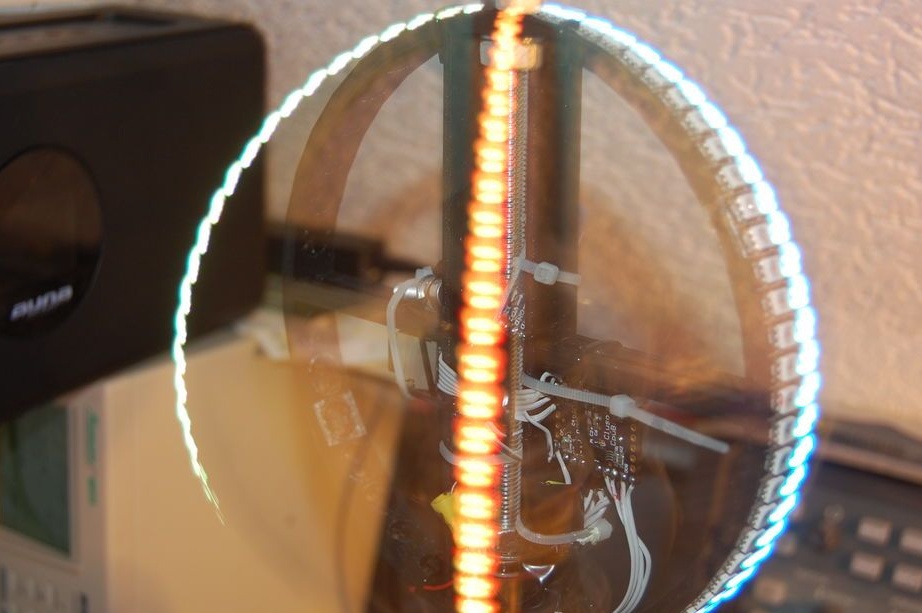
• אם אתה מסובב את הטבעת ביד, נוריות LED צריכות להבהב בכל פעם שחיישן האולם יעביר את המגנט
• הפעל את המנוע. בהעלאת המהירות עם הכפתורים, יש להבטיח כי נוריות הנורית נדלקות כפי שמוצג בשני תמונות
• חבר את מסוף Arduino לבקר המנוע.
• זכור את הערך המוצג.
• עצור את המנוע
• כתוב את הערך שנשמר בעבר למשתנה "startPos"סקיצה POV_MotorControl
• תכני שוב את הארדואינו.
בפעם הבאה שהמנוע שלך יתחיל מיד במהירות הנכונה. עכשיו אתה יכול "למלא" על המפה כל תמונה. לשם כך, עליך לשנות את גודל התמונה ב 120x64 פיקסלים, לסובב את התמונה נגד כיוון השעון ב 90 מעלות, ולשקוף אנכית. צמצם את בהירות התמונה, מכיוון שנוריות ה- LED בהירות מאוד. לשם כך עדיף להשתמש בתיקון גמא עם מקדם 0.45.
שמור תמונה כ- BPM 24 סיביות ללא דחיסה. לאחר כל המניפולציות, קובץ הפלט יהיה בגודל 23094 בתים.



